
一种可旋转的机械臂.pdf

一只****呀盟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可旋转的机械臂.pdf
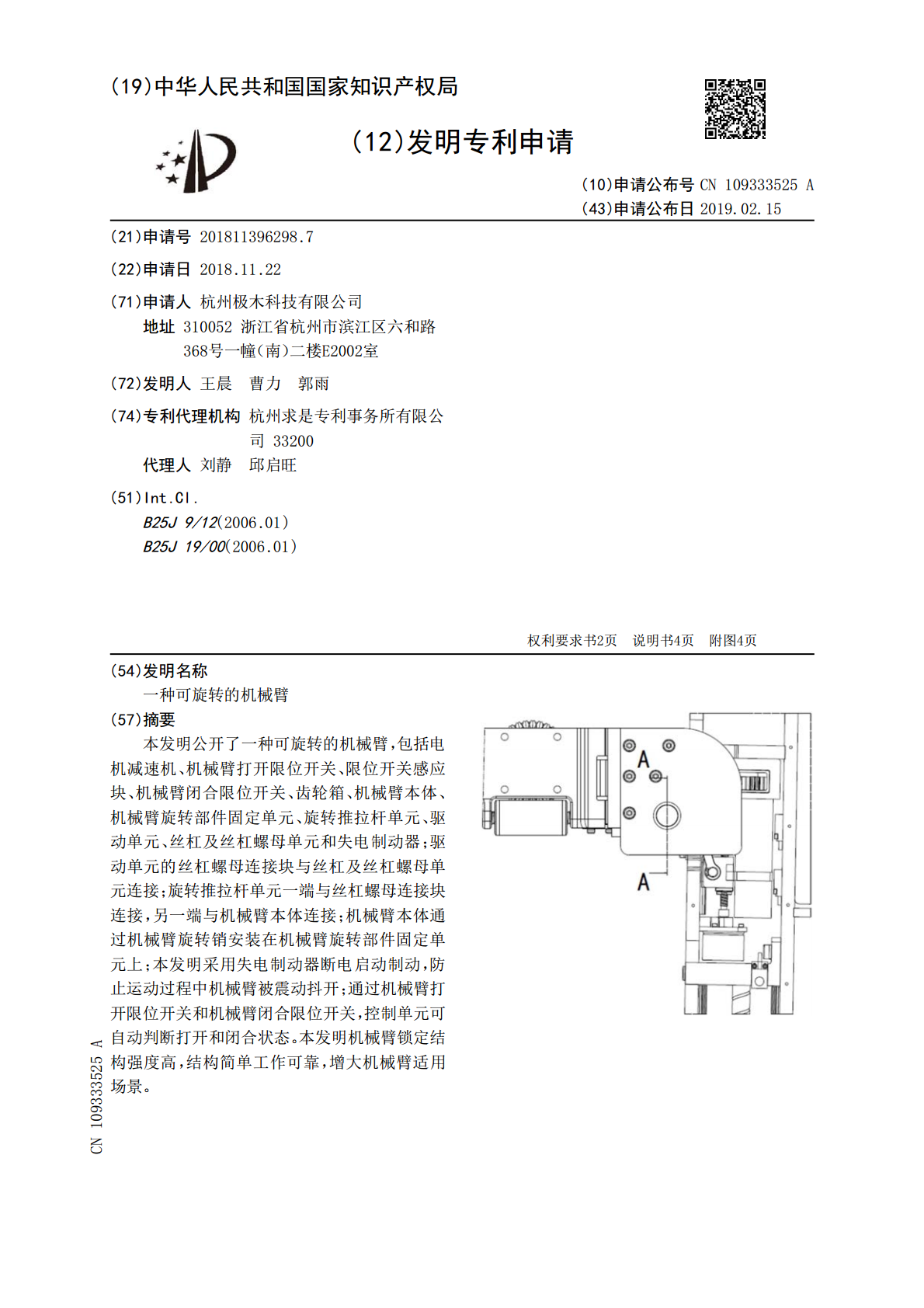
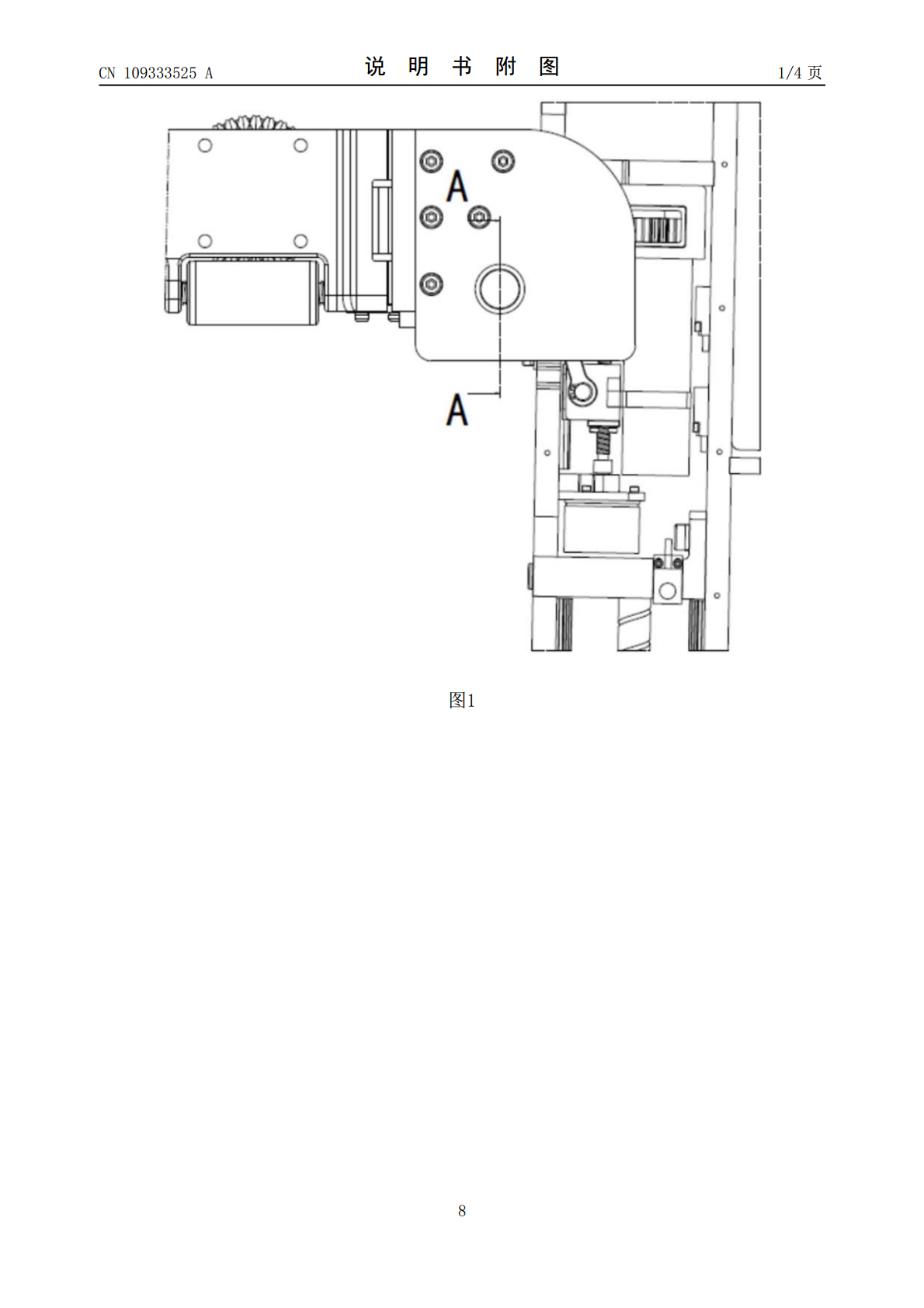
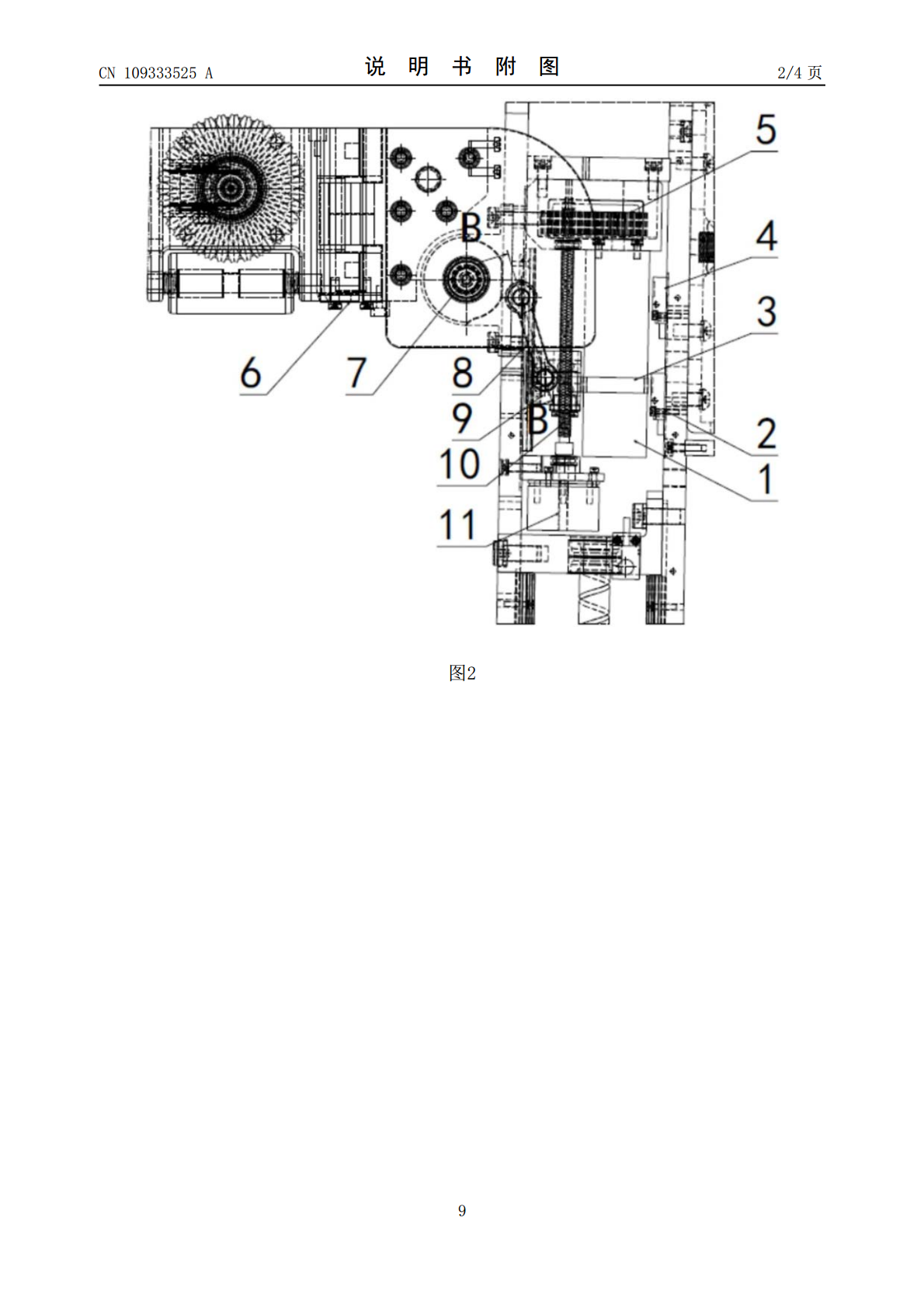
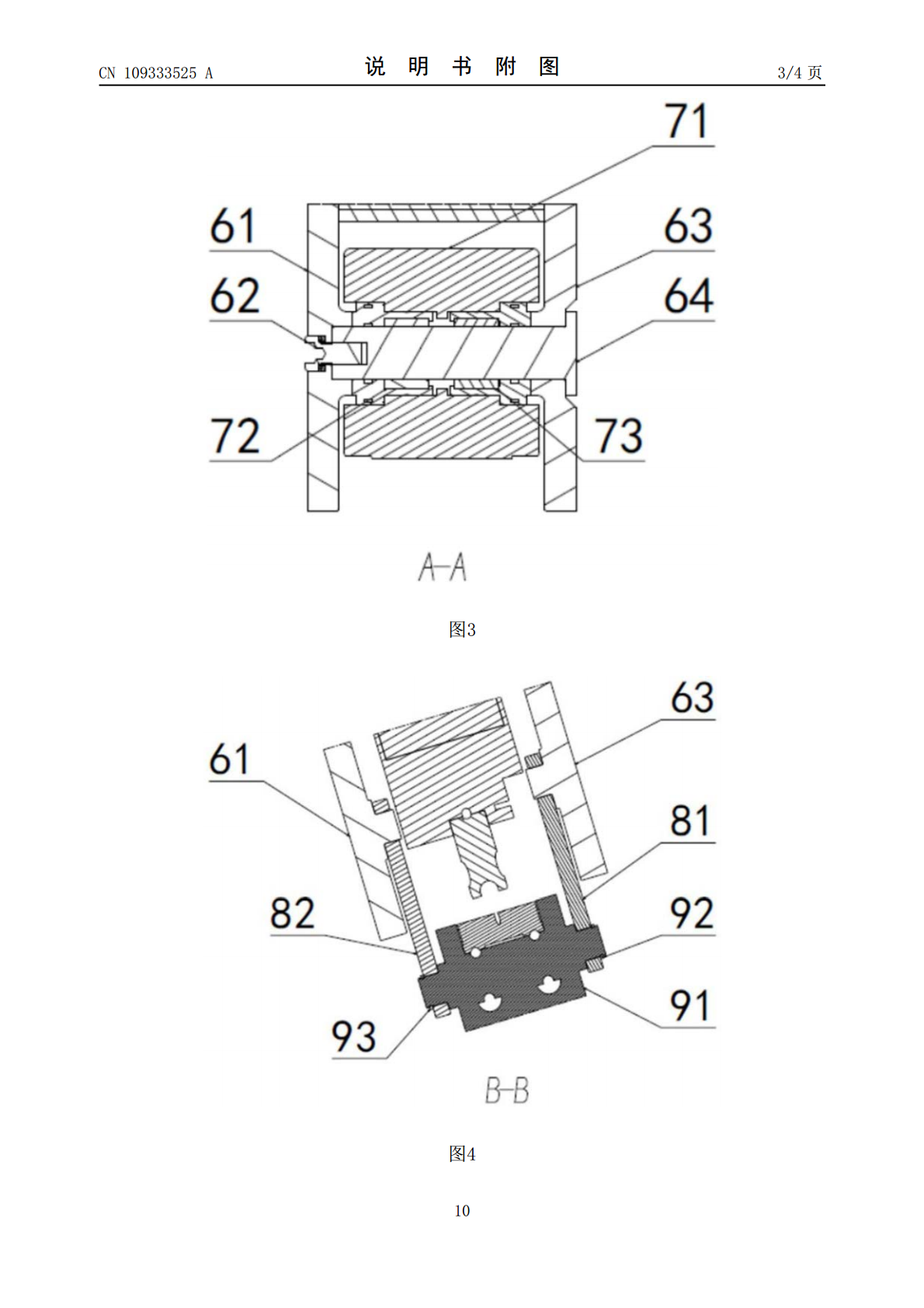
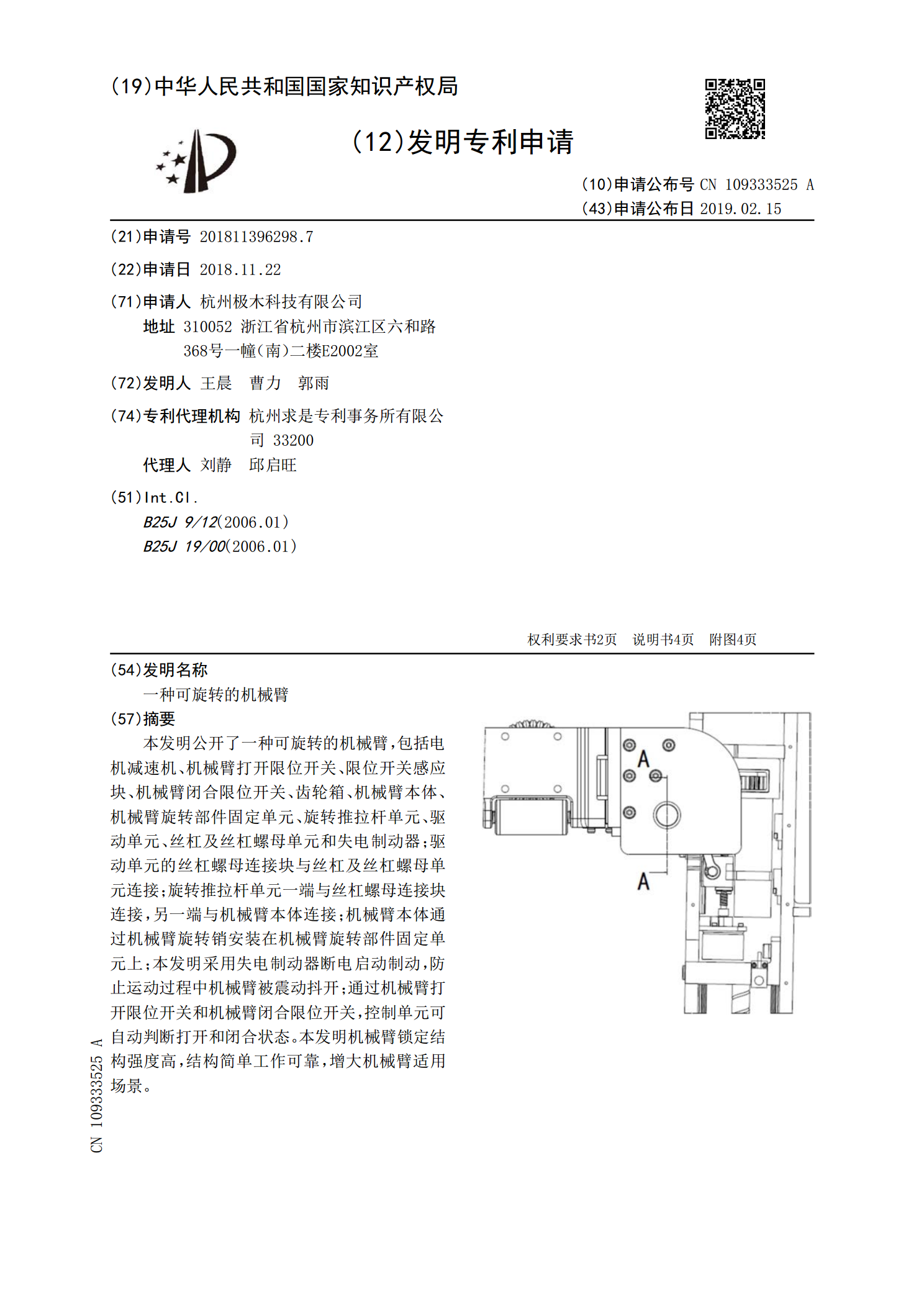
本发明公开了一种可旋转的机械臂,包括电机减速机、机械臂打开限位开关、限位开关感应块、机械臂闭合限位开关、齿轮箱、机械臂本体、机械臂旋转部件固定单元、旋转推拉杆单元、驱动单元、丝杠及丝杠螺母单元和失电制动器;驱动单元的丝杠螺母连接块与丝杠及丝杠螺母单元连接;旋转推拉杆单元一端与丝杠螺母连接块连接,另一端与机械臂本体连接;机械臂本体通过机械臂旋转销安装在机械臂旋转部件固定单元上;本发明采用失电制动器断电启动制动,防止运动过程中机械臂被震动抖开;通过机械臂打开限位开关和机械臂闭合限位开关,控制单元可自动判断打开
一种可旋转的管材夹持机械臂.pdf
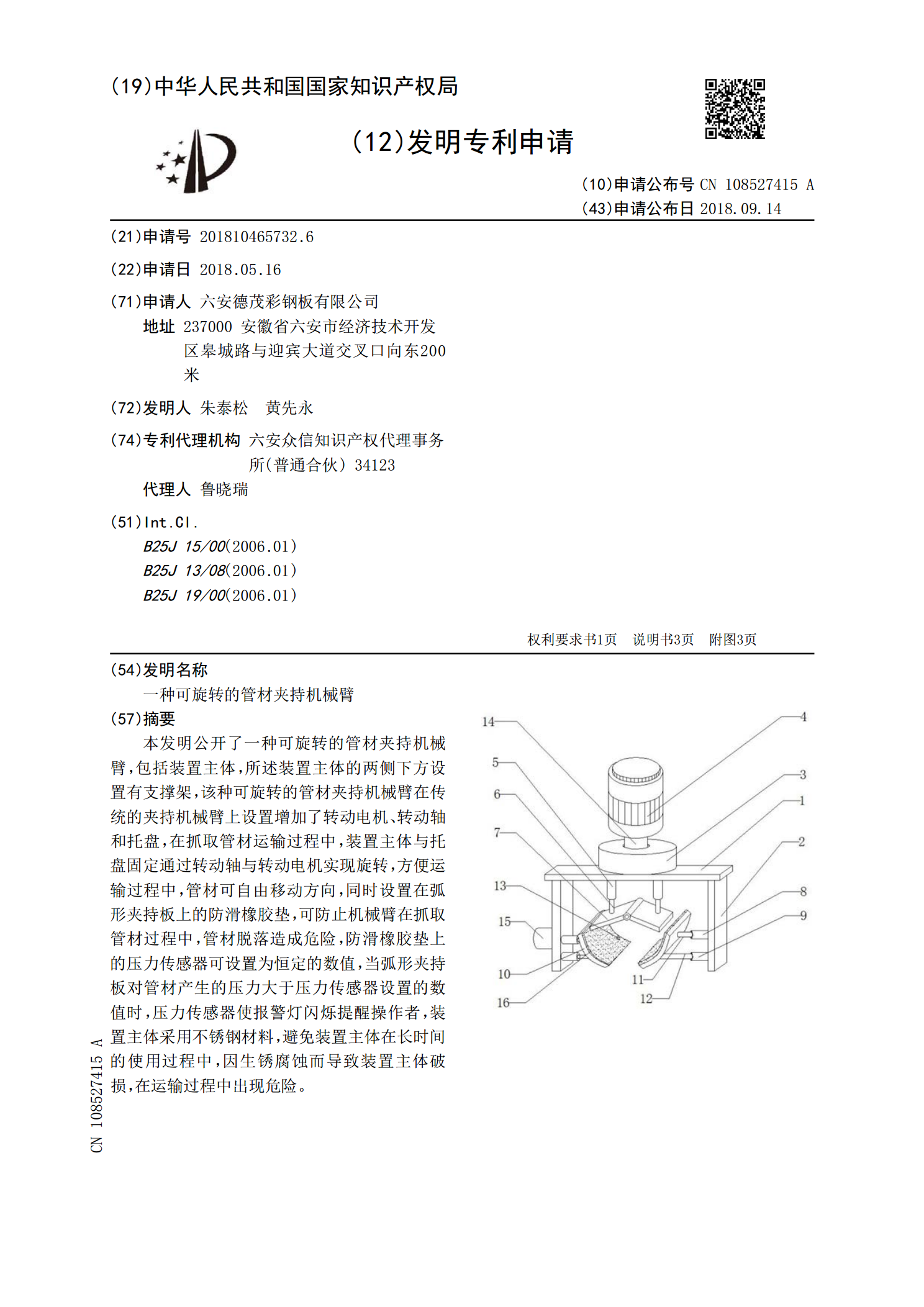
本发明公开了一种可旋转的管材夹持机械臂,包括装置主体,所述装置主体的两侧下方设置有支撑架,该种可旋转的管材夹持机械臂在传统的夹持机械臂上设置增加了转动电机、转动轴和托盘,在抓取管材运输过程中,装置主体与托盘固定通过转动轴与转动电机实现旋转,方便运输过程中,管材可自由移动方向,同时设置在弧形夹持板上的防滑橡胶垫,可防止机械臂在抓取管材过程中,管材脱落造成危险,防滑橡胶垫上的压力传感器可设置为恒定的数值,当弧形夹持板对管材产生的压力大于压力传感器设置的数值时,压力传感器使报警灯闪烁提醒操作者,装置主体采用不锈
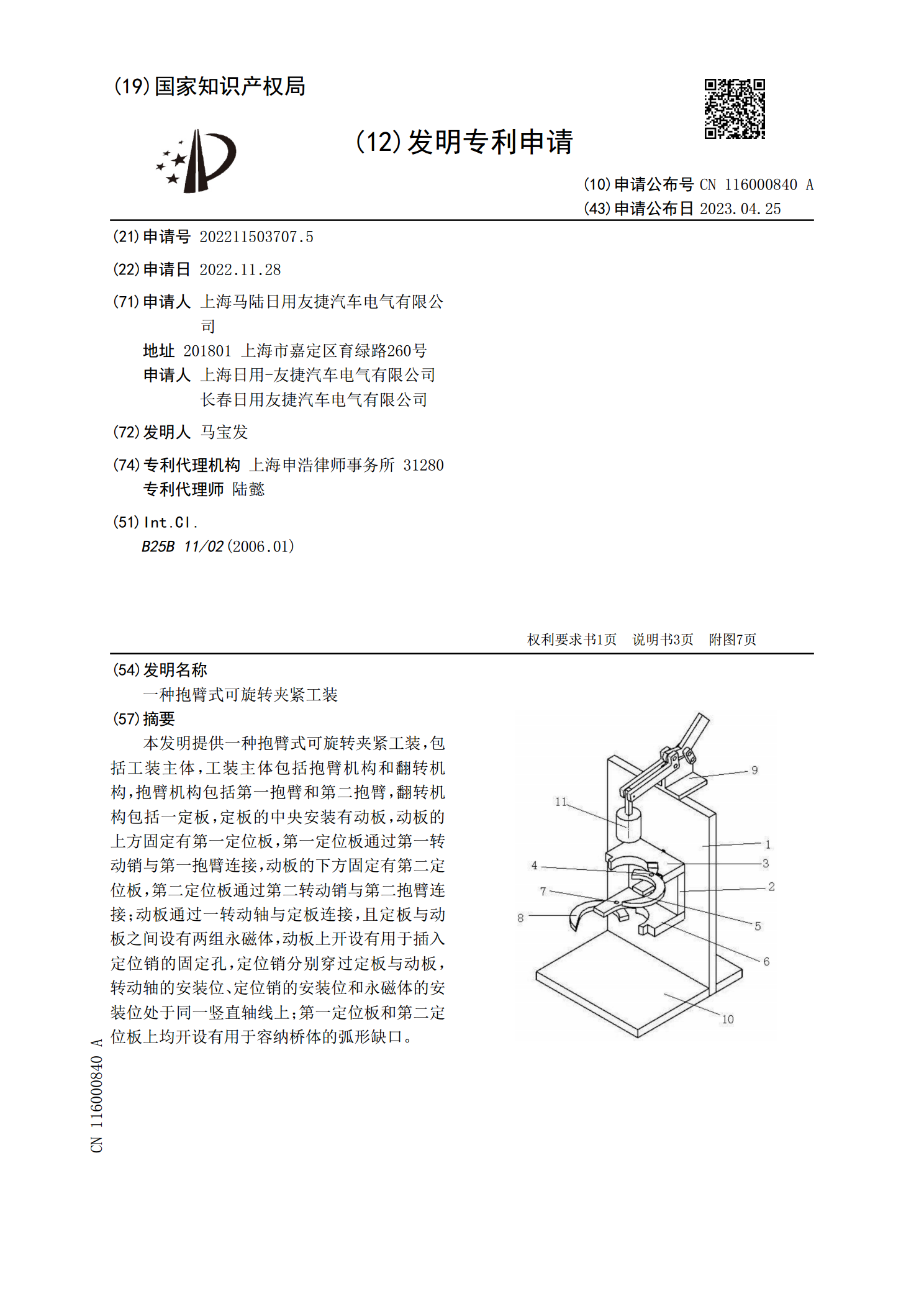
一种抱臂式可旋转夹紧工装.pdf
本发明提供一种抱臂式可旋转夹紧工装,包括工装主体,工装主体包括抱臂机构和翻转机构,抱臂机构包括第一抱臂和第二抱臂,翻转机构包括一定板,定板的中央安装有动板,动板的上方固定有第一定位板,第一定位板通过第一转动销与第一抱臂连接,动板的下方固定有第二定位板,第二定位板通过第二转动销与第二抱臂连接;动板通过一转动轴与定板连接,且定板与动板之间设有两组永磁体,动板上开设有用于插入定位销的固定孔,定位销分别穿过定板与动板,转动轴的安装位、定位销的安装位和永磁体的安装位处于同一竖直轴线上;第一定位板和第二定位板上均开设
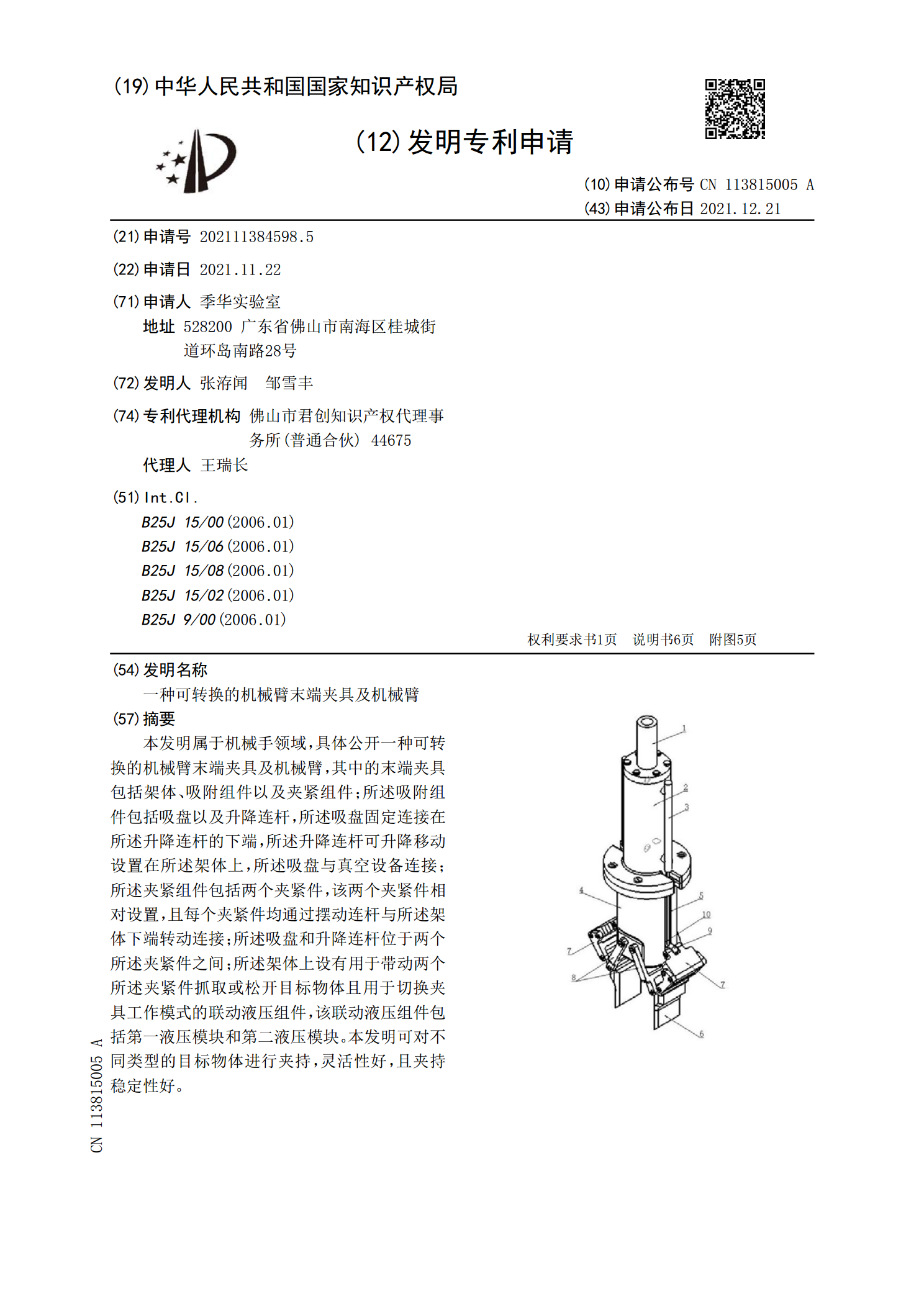
一种可转换的机械臂末端夹具及机械臂.pdf
本发明属于机械手领域,具体公开一种可转换的机械臂末端夹具及机械臂,其中的末端夹具包括架体、吸附组件以及夹紧组件;所述吸附组件包括吸盘以及升降连杆,所述吸盘固定连接在所述升降连杆的下端,所述升降连杆可升降移动设置在所述架体上,所述吸盘与真空设备连接;所述夹紧组件包括两个夹紧件,该两个夹紧件相对设置,且每个夹紧件均通过摆动连杆与所述架体下端转动连接;所述吸盘和升降连杆位于两个所述夹紧件之间;所述架体上设有用于带动两个所述夹紧件抓取或松开目标物体且用于切换夹具工作模式的联动液压组件,该联动液压组件包括第一液压模
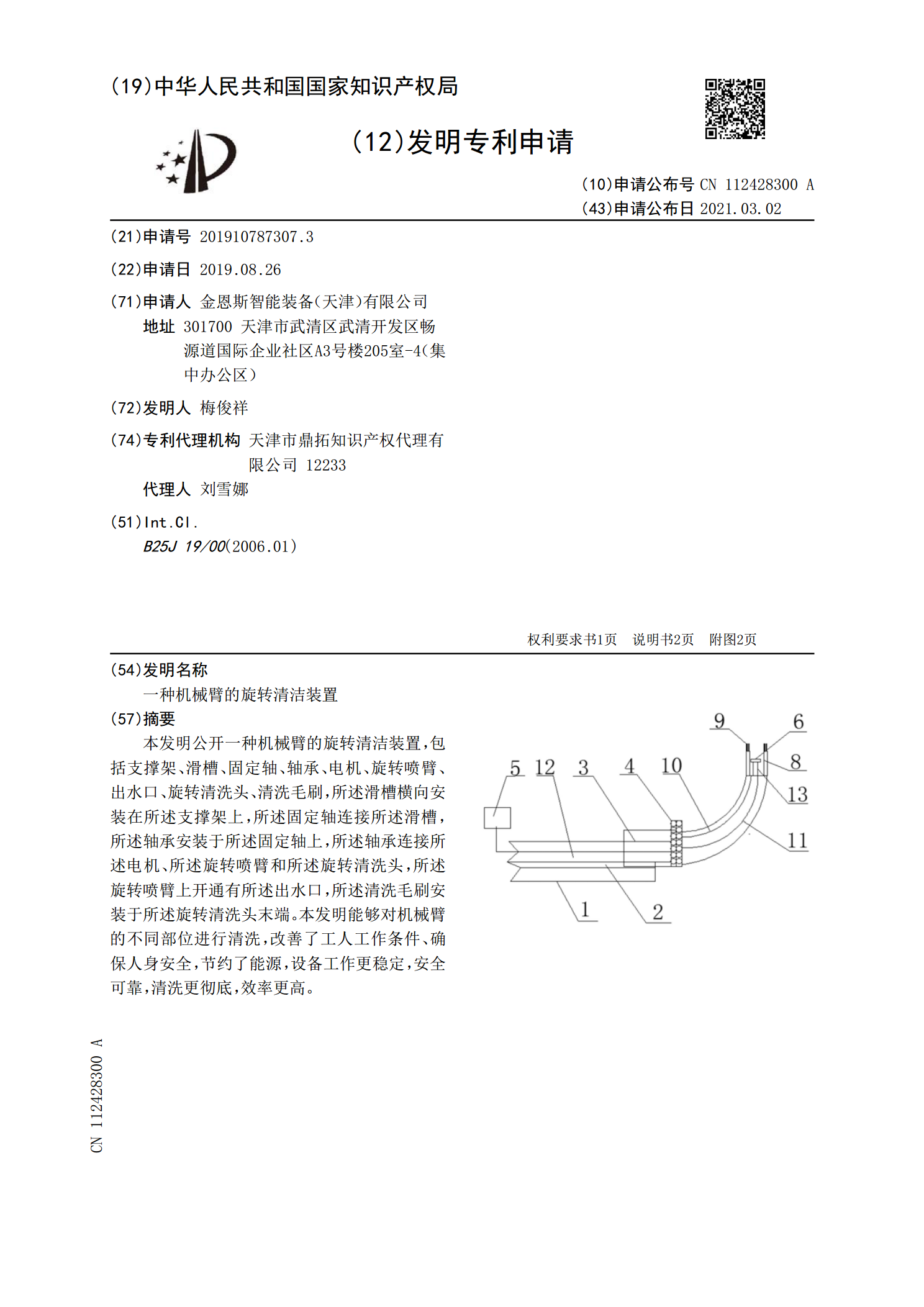
一种机械臂的旋转清洁装置.pdf
本发明公开一种机械臂的旋转清洁装置,包括支撑架、滑槽、固定轴、轴承、电机、旋转喷臂、出水口、旋转清洗头、清洗毛刷,所述滑槽横向安装在所述支撑架上,所述固定轴连接所述滑槽,所述轴承安装于所述固定轴上,所述轴承连接所述电机、所述旋转喷臂和所述旋转清洗头,所述旋转喷臂上开通有所述出水口,所述清洗毛刷安装于所述旋转清洗头末端。本发明能够对机械臂的不同部位进行清洗,改善了工人工作条件、确保人身安全,节约了能源,设备工作更稳定,安全可靠,清洗更彻底,效率更高。