
一种电机扭矩控制方法及轮边电机分布式驱动系统.pdf

慧娇****文章

1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电机扭矩控制方法及轮边电机分布式驱动系统.pdf
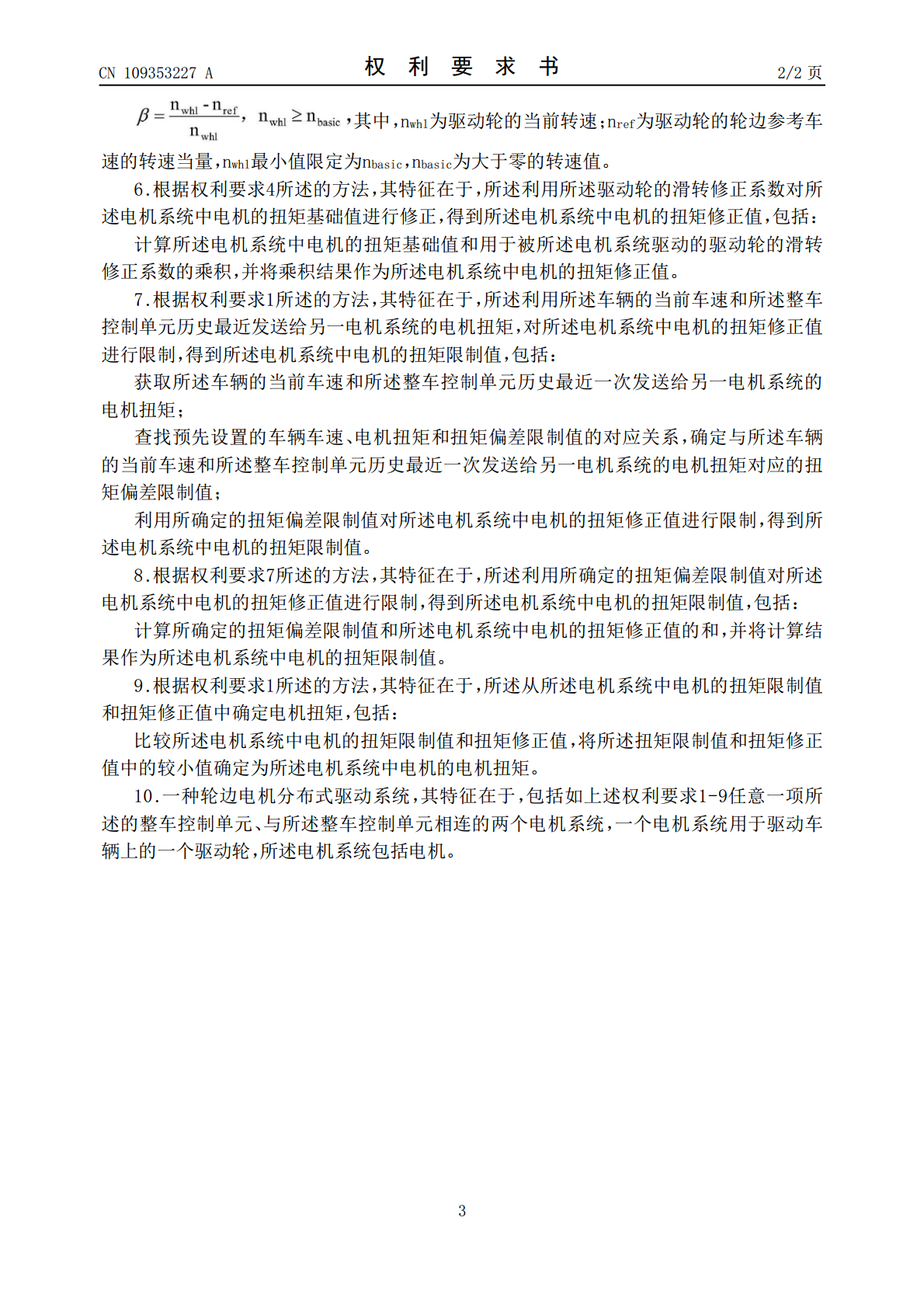
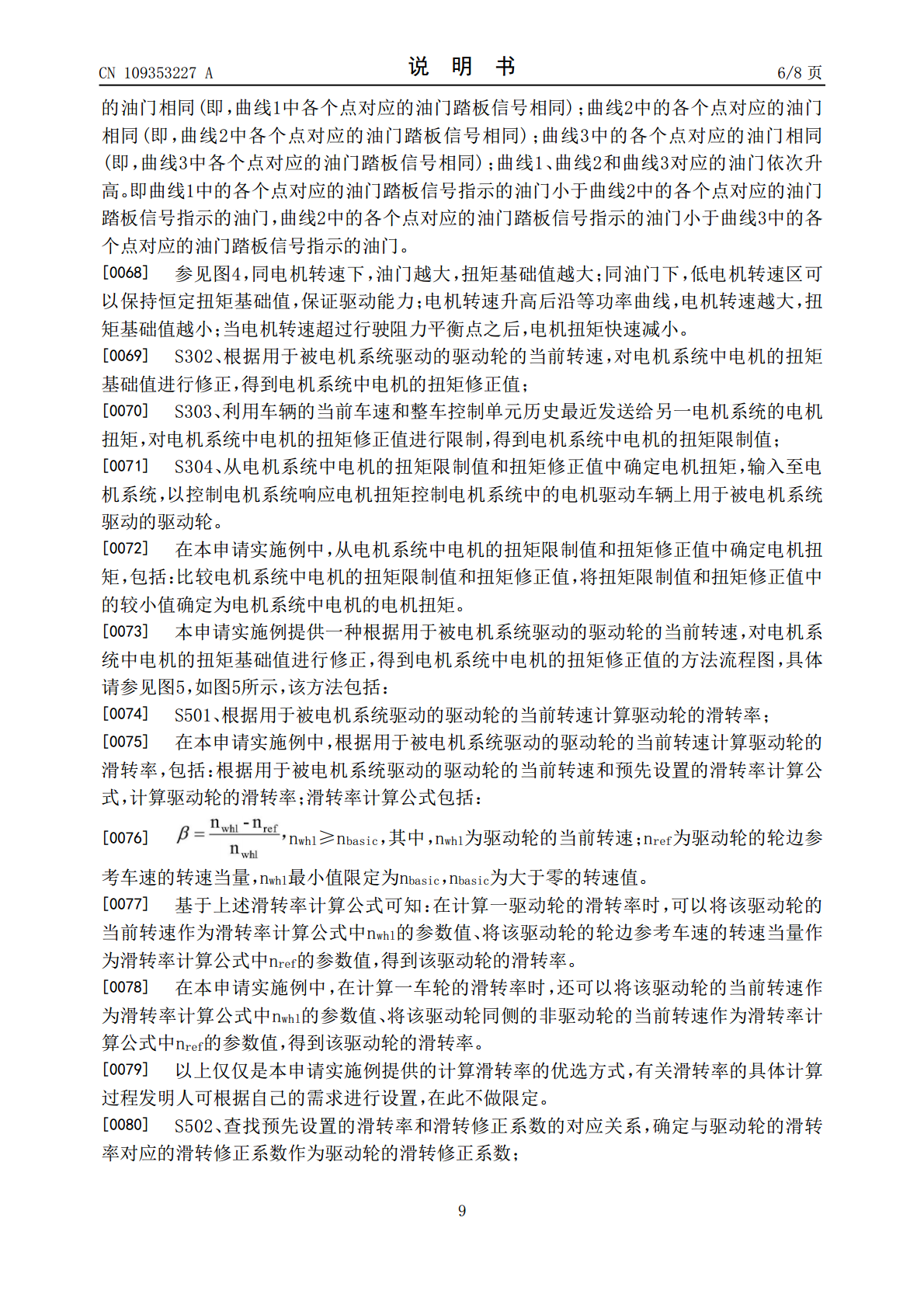
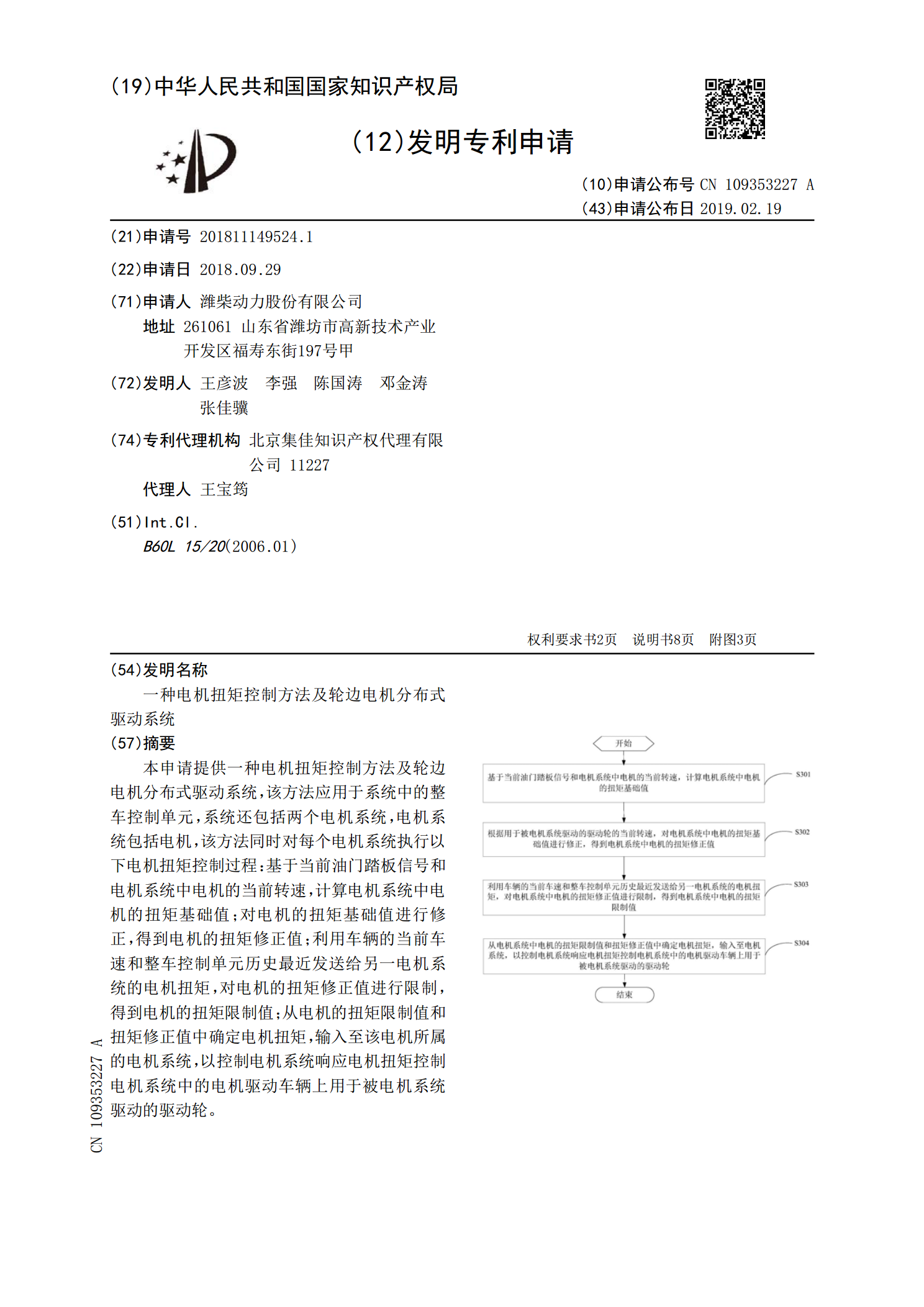
本申请提供一种电机扭矩控制方法及轮边电机分布式驱动系统,该方法应用于系统中的整车控制单元,系统还包括两个电机系统,电机系统包括电机,该方法同时对每个电机系统执行以下电机扭矩控制过程:基于当前油门踏板信号和电机系统中电机的当前转速,计算电机系统中电机的扭矩基础值;对电机的扭矩基础值进行修正,得到电机的扭矩修正值;利用车辆的当前车速和整车控制单元历史最近发送给另一电机系统的电机扭矩,对电机的扭矩修正值进行限制,得到电机的扭矩限制值;从电机的扭矩限制值和扭矩修正值中确定电机扭矩,输入至该电机所属的电机系统,以控

一种轮边电机驱动系统、及一种轮边电机驱动桥.pdf
本发明涉及一种轮边电机驱动系统、及一种轮边电机驱动桥。轮边电机驱动系统包括驱动电机总成(2)和主减速器总成(4),主减速器总成(4)包括主动齿轮、至少两个中间齿轮轴总成以及输出齿轮(16),每个中间齿轮轴总成具有以共同转动的方式连接在一起的主动中间齿轮和从动中间齿轮,驱动电机总成(2)的电机输出轴与主动齿轮(13)连接,主动齿轮(13)与每个中间齿轮轴总成中的主动中间齿轮均啮合,每个中间齿轮轴总成中的从动中间齿轮均与输出齿轮(16)啮合,并且主动齿轮(13)与输出齿轮(16)偏心设置。轮边电机驱动桥包括所

一种轮边电机驱动系统、及一种轮边电机驱动桥.pdf
本发明涉及一种轮边电机驱动系统、及一种轮边电机驱动桥。轮边电机驱动系统包括主减速器总成(4)、轮边减速器总成(6)和轮毂总成(5),主减速器总成包括输出齿轮(16);轮边减速器总成包括太阳轮轴(12)、行星轮(18)、轮减壳(22)、行星架(31);其中,主减速器总成的输出齿轮以传递动力的方式与太阳轮轴连接,太阳轮轴与行星轮啮合,行星轮以传递动力的方式设置在行星架上,行星架以传递动力的方式设置在轮减壳中,轮减壳以传递动力的方式与轮毂总成连接。轮边电机驱动桥包括所述的轮边电机驱动系统。该轮边电机驱动系统及轮
一种轮边电机驱动系统的跛行控制方法及系统.pdf
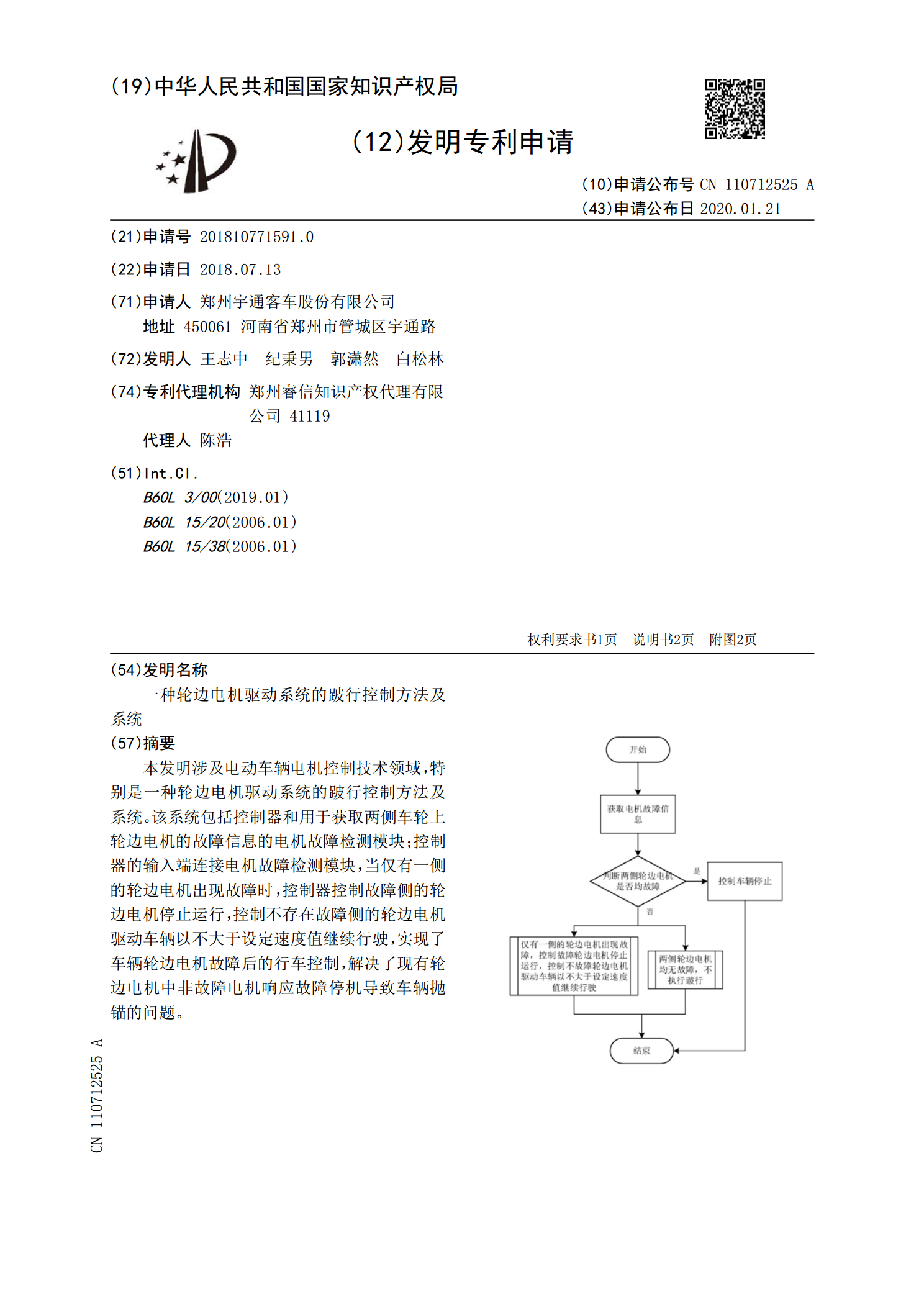
本发明涉及电动车辆电机控制技术领域,特别是一种轮边电机驱动系统的跛行控制方法及系统。该系统包括控制器和用于获取两侧车轮上轮边电机的故障信息的电机故障检测模块;控制器的输入端连接电机故障检测模块,当仅有一侧的轮边电机出现故障时,控制器控制故障侧的轮边电机停止运行,控制不存在故障侧的轮边电机驱动车辆以不大于设定速度值继续行驶,实现了车辆轮边电机故障后的行车控制,解决了现有轮边电机中非故障电机响应故障停机导致车辆抛锚的问题。

齿轮支撑结构、轮边电机驱动系统及轮边电机驱动桥.pdf
本发明涉及汽车领域,尤其涉及一种齿轮支撑结构、轮边电机驱动系统及轮边电机驱动桥。齿轮支撑结构包括驱动电机总成(2)的前端盖(24)和齿轮架(20),前端盖具有第一支撑孔(241),齿轮架具有第二支撑孔(201),并且齿轮架(20)设置在前端盖上,与前端盖共同构成容纳空间(25);其中,第一支撑孔与第二支撑孔一一对应,并且相对应的第一支撑孔和第二支撑孔是一次加工成型的,容纳空间位于第一支撑孔和第二支撑孔之间。轮边电机驱动系统包括上述齿轮支撑结构。轮边电机驱动桥包括权利要求上述轮边电机驱动系统。齿轮支撑结构、