
机器人驱动底盘.pdf

Ja****44

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人驱动底盘.pdf
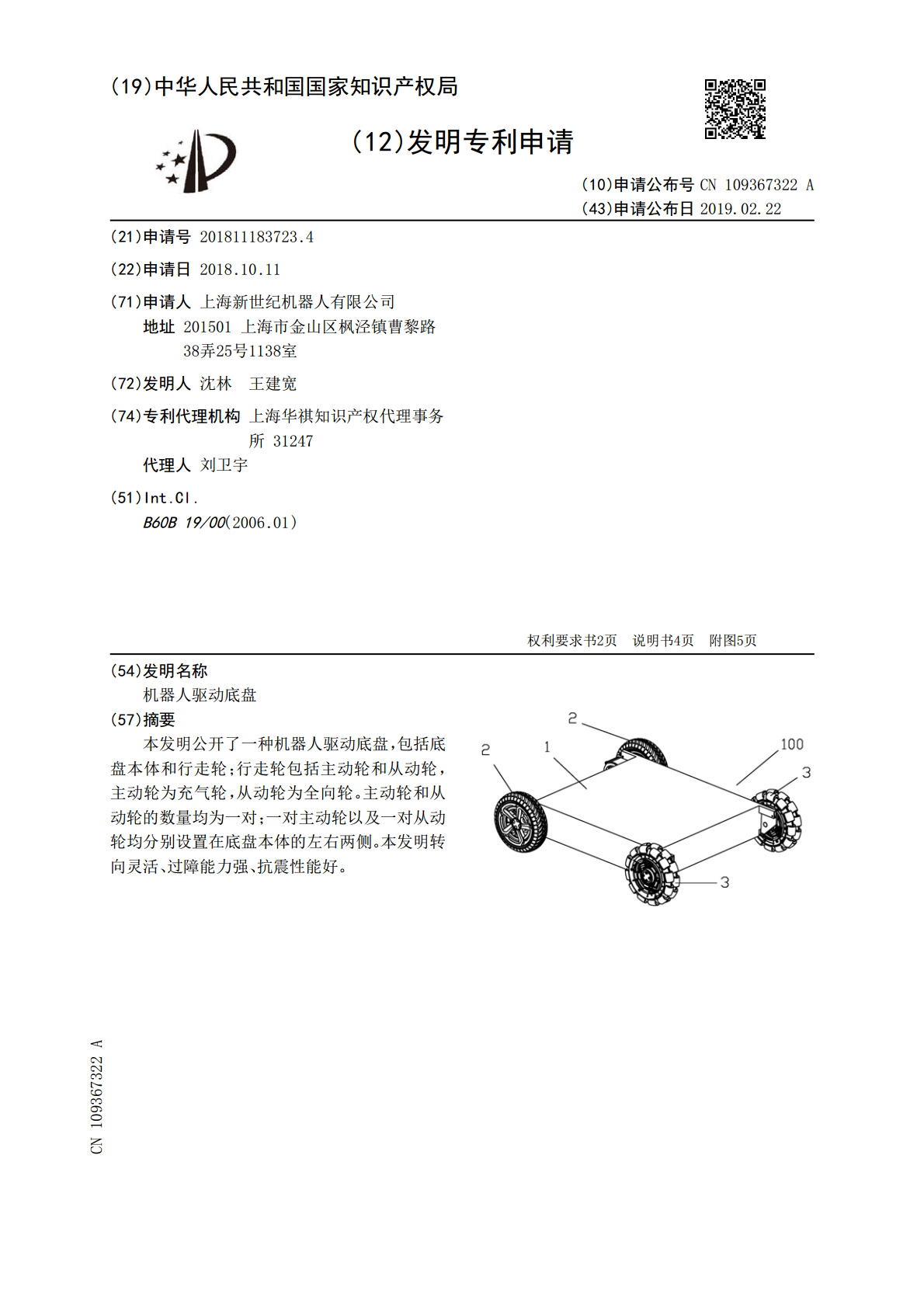
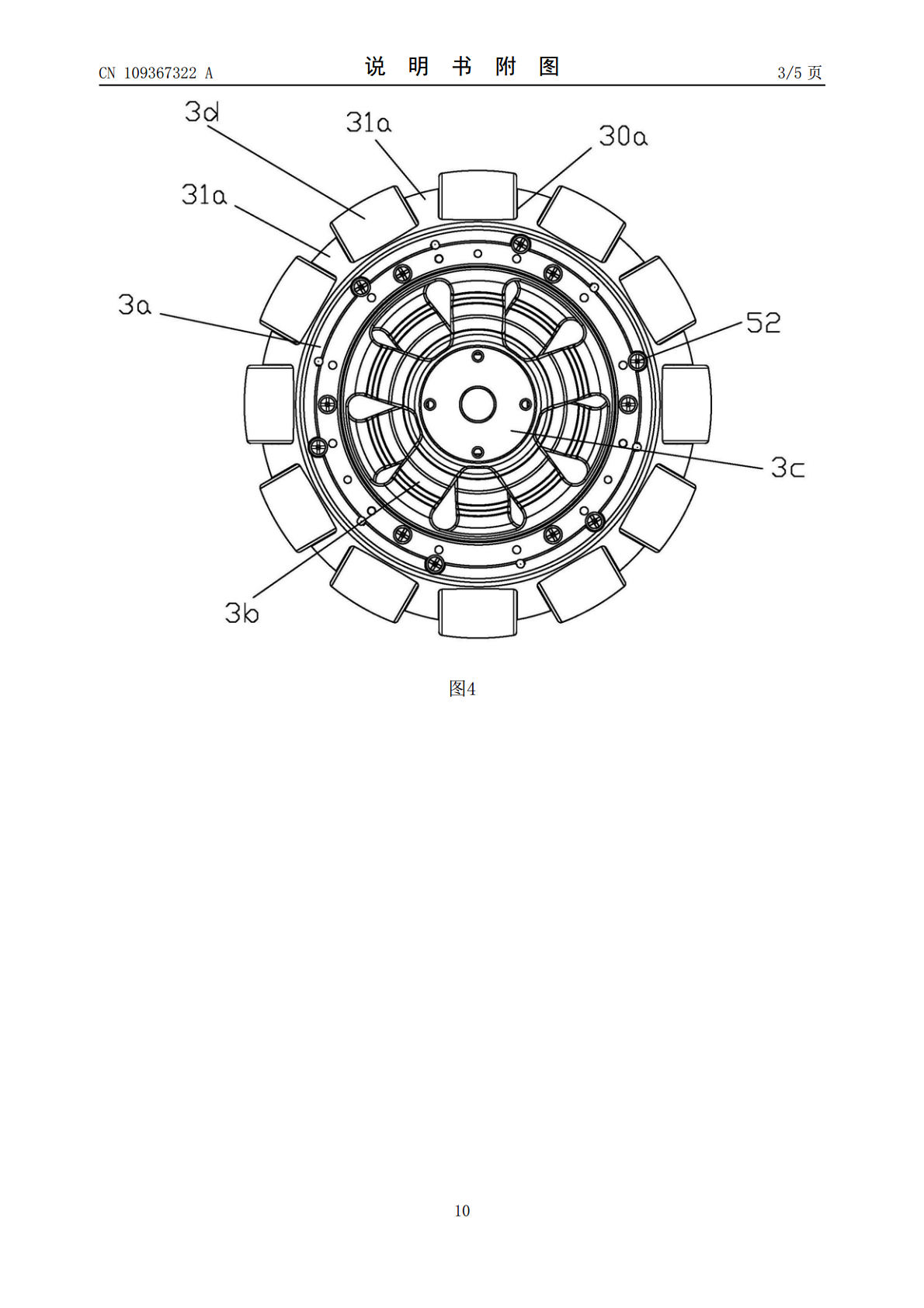
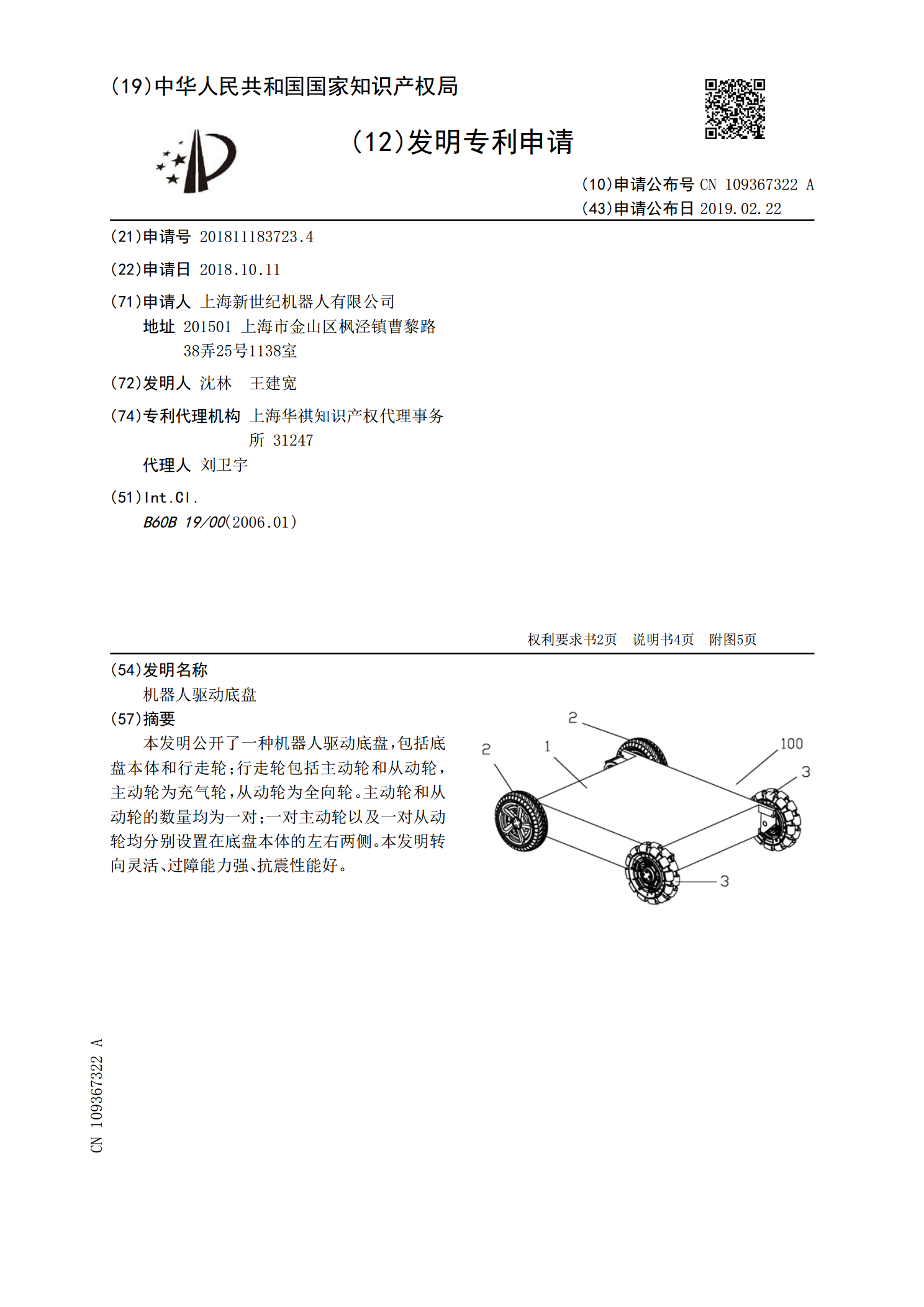
本发明公开了一种机器人驱动底盘,包括底盘本体和行走轮;行走轮包括主动轮和从动轮,主动轮为充气轮,从动轮为全向轮。主动轮和从动轮的数量均为一对;一对主动轮以及一对从动轮均分别设置在底盘本体的左右两侧。本发明转向灵活、过障能力强、抗震性能好。
单驱动的机器人底盘.pdf
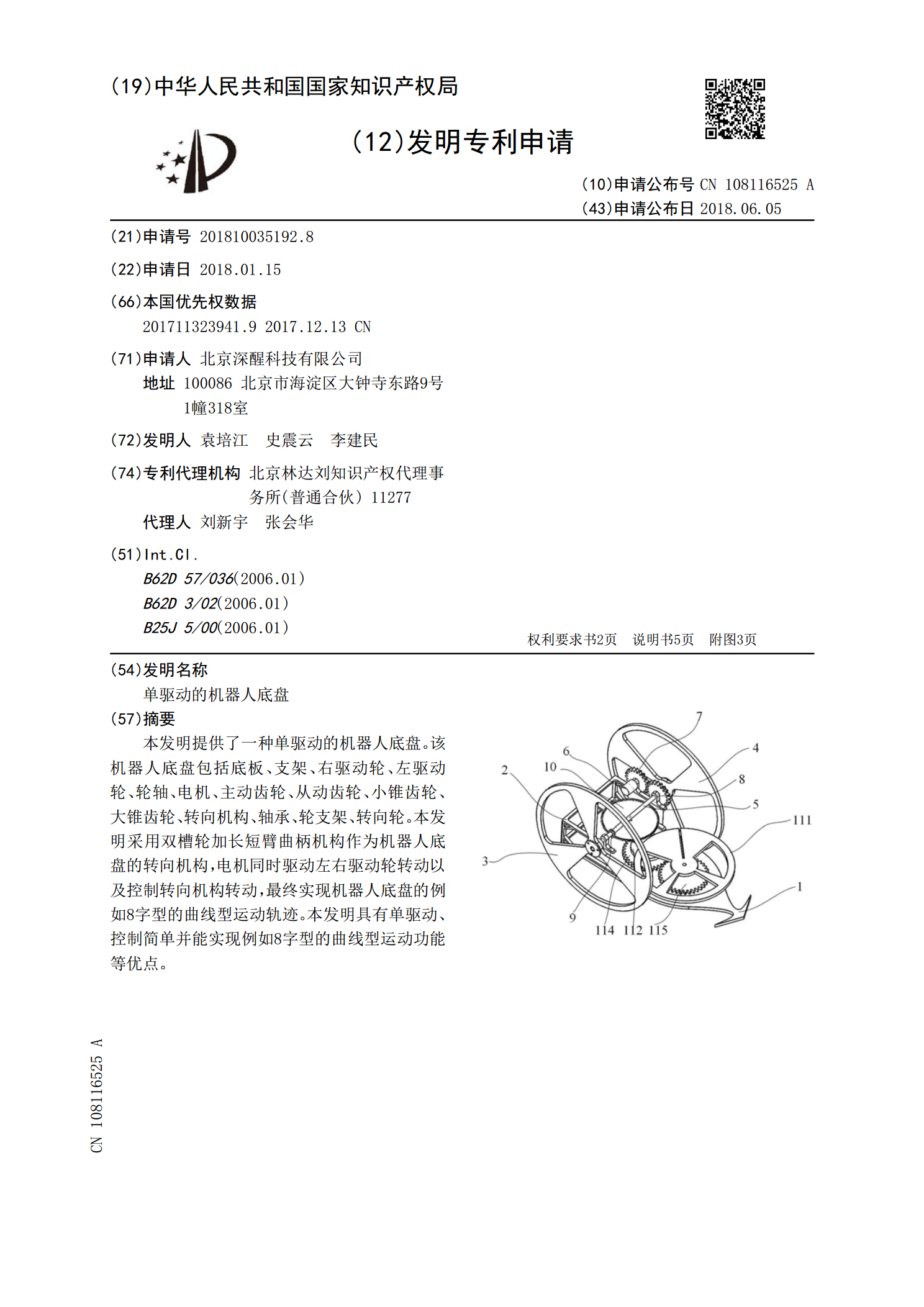
本发明提供了一种单驱动的机器人底盘。该机器人底盘包括底板、支架、右驱动轮、左驱动轮、轮轴、电机、主动齿轮、从动齿轮、小锥齿轮、大锥齿轮、转向机构、轴承、轮支架、转向轮。本发明采用双槽轮加长短臂曲柄机构作为机器人底盘的转向机构,电机同时驱动左右驱动轮转动以及控制转向机构转动,最终实现机器人底盘的例如8字型的曲线型运动轨迹。本发明具有单驱动、控制简单并能实现例如8字型的曲线型运动功能等优点。
机器人底盘的驱动装置.pdf
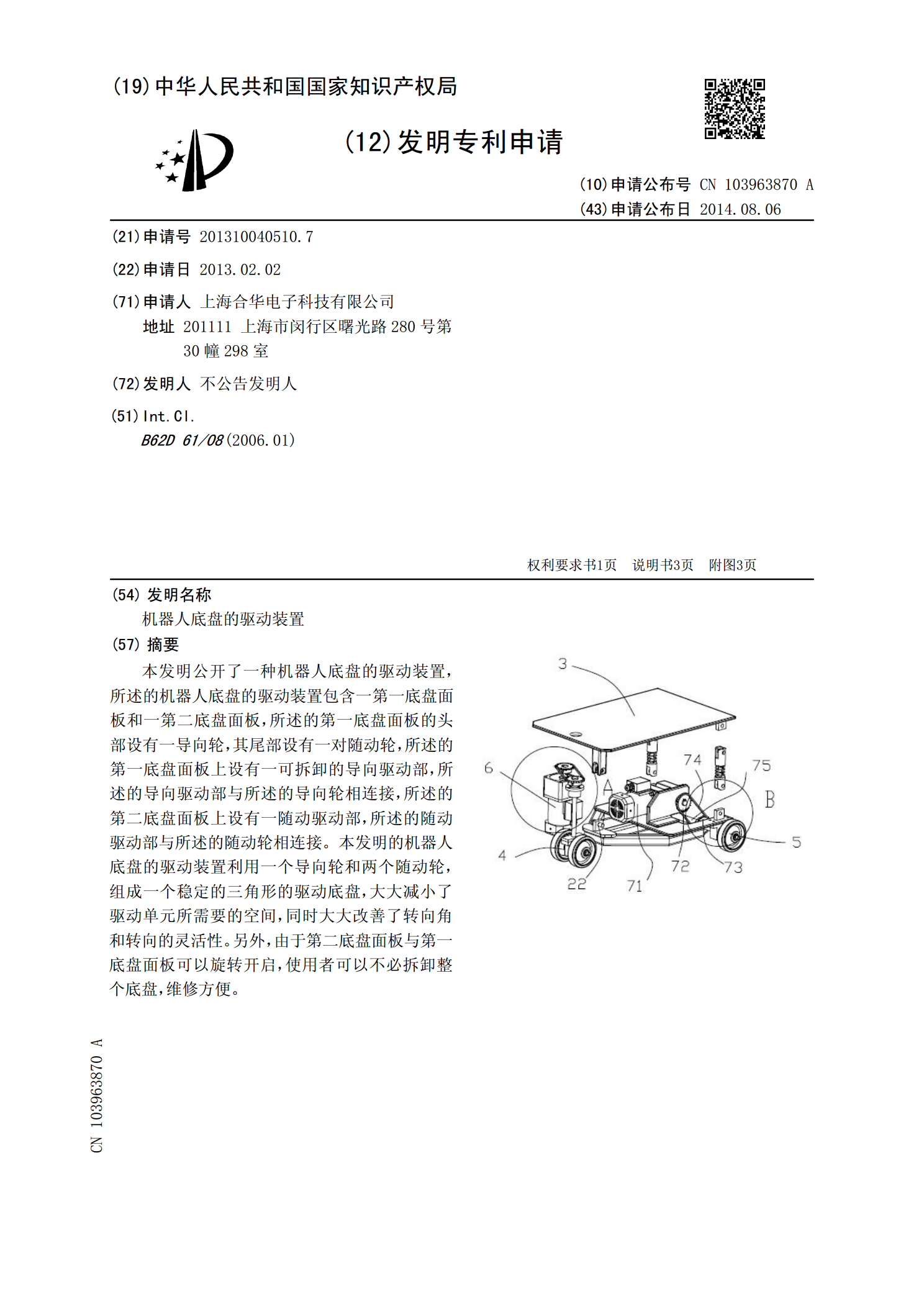
本发明公开了一种机器人底盘的驱动装置,所述的机器人底盘的驱动装置包含一第一底盘面板和一第二底盘面板,所述的第一底盘面板的头部设有一导向轮,其尾部设有一对随动轮,所述的第一底盘面板上设有一可拆卸的导向驱动部,所述的导向驱动部与所述的导向轮相连接,所述的第二底盘面板上设有一随动驱动部,所述的随动驱动部与所述的随动轮相连接。本发明的机器人底盘的驱动装置利用一个导向轮和两个随动轮,组成一个稳定的三角形的驱动底盘,大大减小了驱动单元所需要的空间,同时大大改善了转向角和转向的灵活性。另外,由于第二底盘面板与第一底盘面

机器人底盘驱动轮组.pdf
本发明公开了一种机器人底盘驱动轮组,包括底盘本体(1)和安装在所述底盘本体(1)底部的两对驱动轮(2);其中,两对所述驱动轮(2)并排设置,且其中一对所述驱动轮(2)为从动轮,另一对所述驱动轮(2)分别通过传动轴(3)与驱动机构相连接,所述驱动机构通过弹性件与所述底盘本体(1)的底端面相连接。该机器人底盘驱动轮组结构简单、组装方便、减震效果好、通过性高,大大提高了机器人行动时的稳定性。
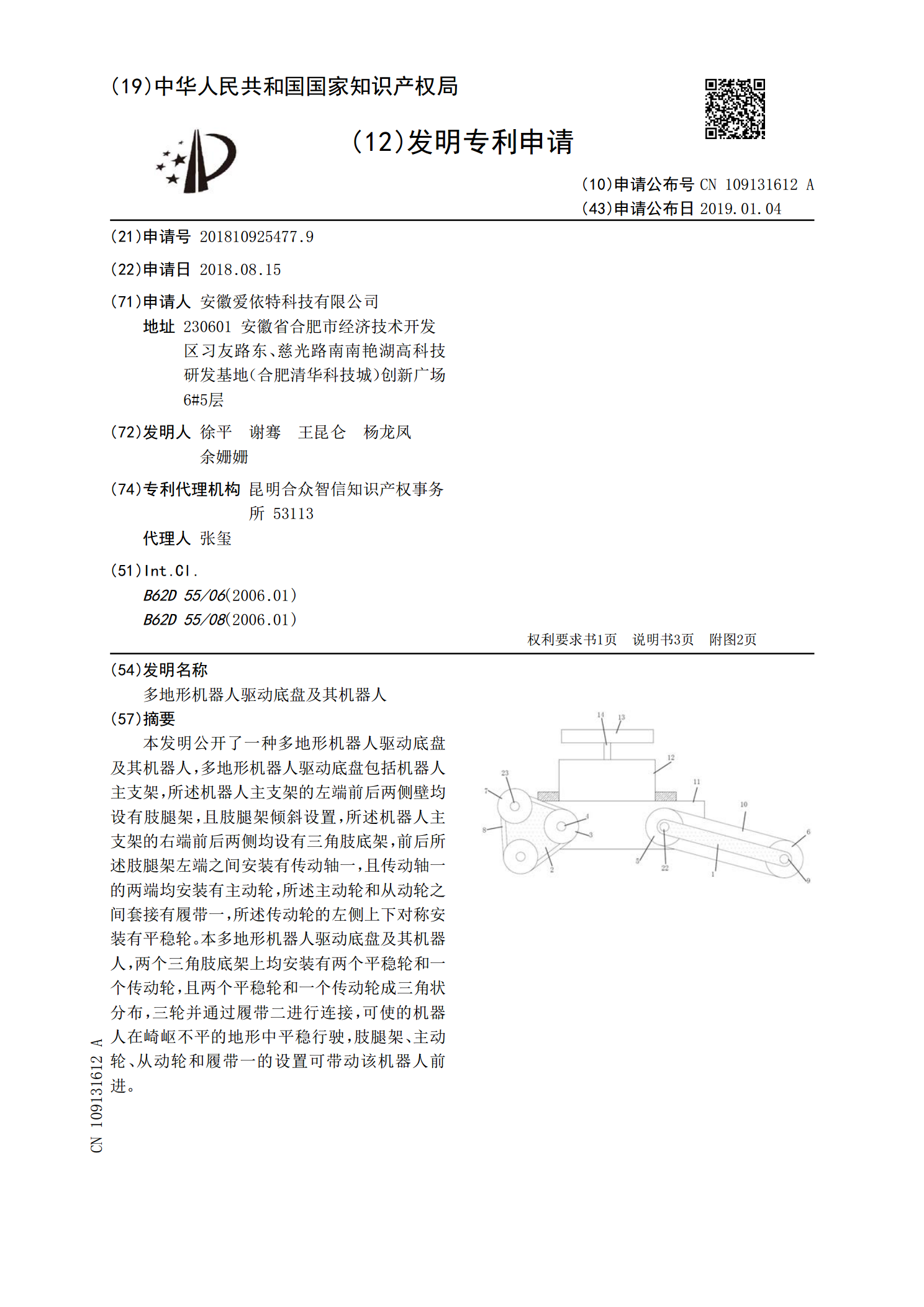
多地形机器人驱动底盘及其机器人.pdf
本发明公开了一种多地形机器人驱动底盘及其机器人,多地形机器人驱动底盘包括机器人主支架,所述机器人主支架的左端前后两侧壁均设有肢腿架,且肢腿架倾斜设置,所述机器人主支架的右端前后两侧均设有三角肢底架,前后所述肢腿架左端之间安装有传动轴一,且传动轴一的两端均安装有主动轮,所述主动轮和从动轮之间套接有履带一,所述传动轮的左侧上下对称安装有平稳轮。本多地形机器人驱动底盘及其机器人,两个三角肢底架上均安装有两个平稳轮和一个传动轮,且两个平稳轮和一个传动轮成三角状分布,三轮并通过履带二进行连接,可使的机器人在崎岖不平