
一种电动助力转向控制方法及系统.pdf

Jo****34

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电动助力转向控制方法、电动助力转向系统及存储介质.pdf
本发明公开一种电动助力转向控制方法、电动助力转向系统及存储介质。该方法包括EPS系统执行的如下步骤:获取LKA系统发送的期望控制信号,期望控制信号包括期望角度信号或者期望扭矩信号;基于整车配置码,对期望控制信号进行兼容校验,获取兼容校验结果;若兼容校验结果为可兼容,则根据期望控制信号获取目标扭矩值,基于目标扭矩值控制助力电机转向。采用整车配置码对不同接口类型对应的期望控制信号进行兼容校验,在兼容校验结果为可兼容时,根据期望控制信号确定的目标扭矩值控制助力电机工作,以达到利用整车配置码切换不同接口类型实现L
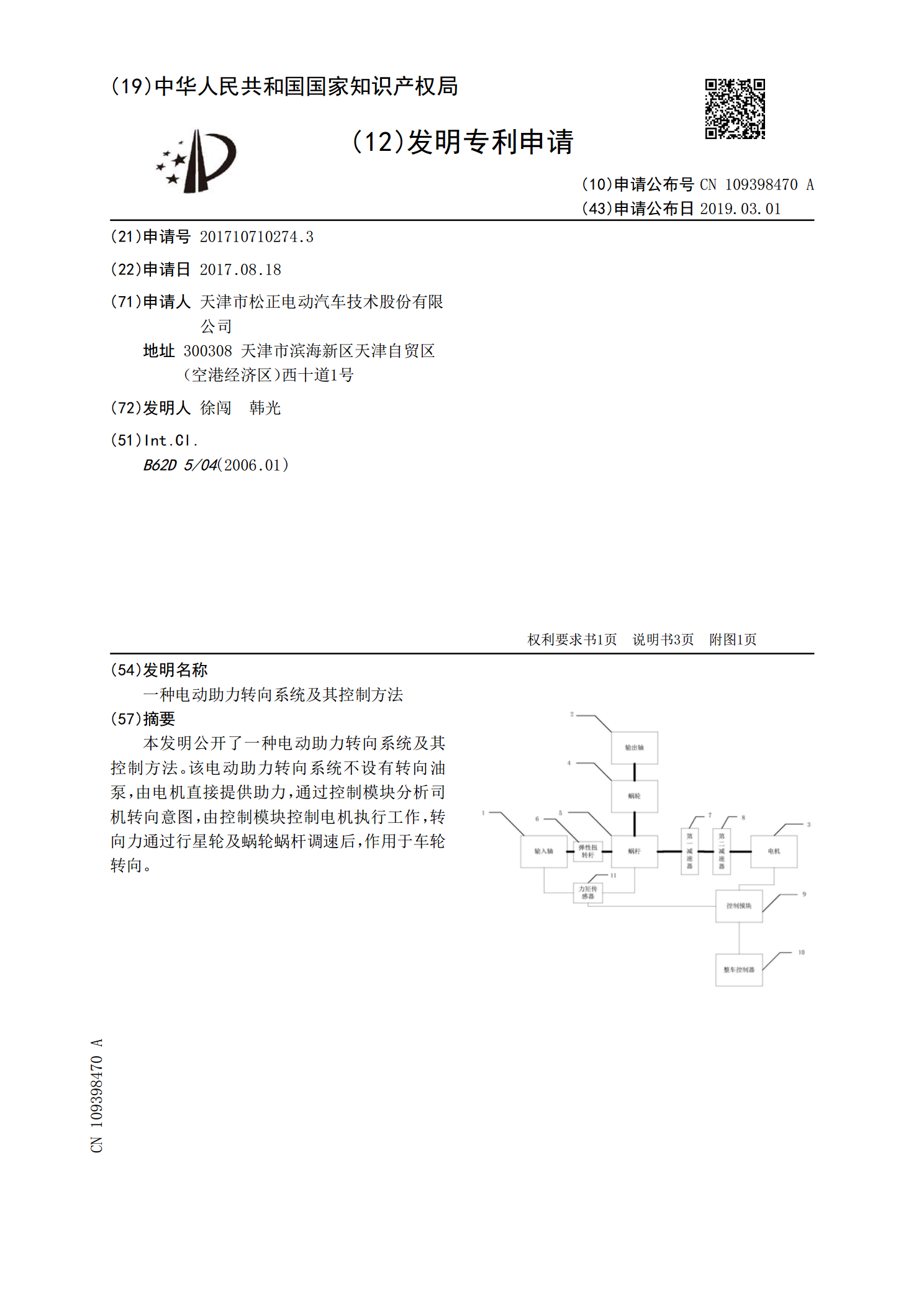
一种电动助力转向系统及其控制方法.pdf
本发明公开了一种电动助力转向系统及其控制方法。该电动助力转向系统不设有转向油泵,由电机直接提供助力,通过控制模块分析司机转向意图,由控制模块控制电机执行工作,转向力通过行星轮及蜗轮蜗杆调速后,作用于车轮转向。

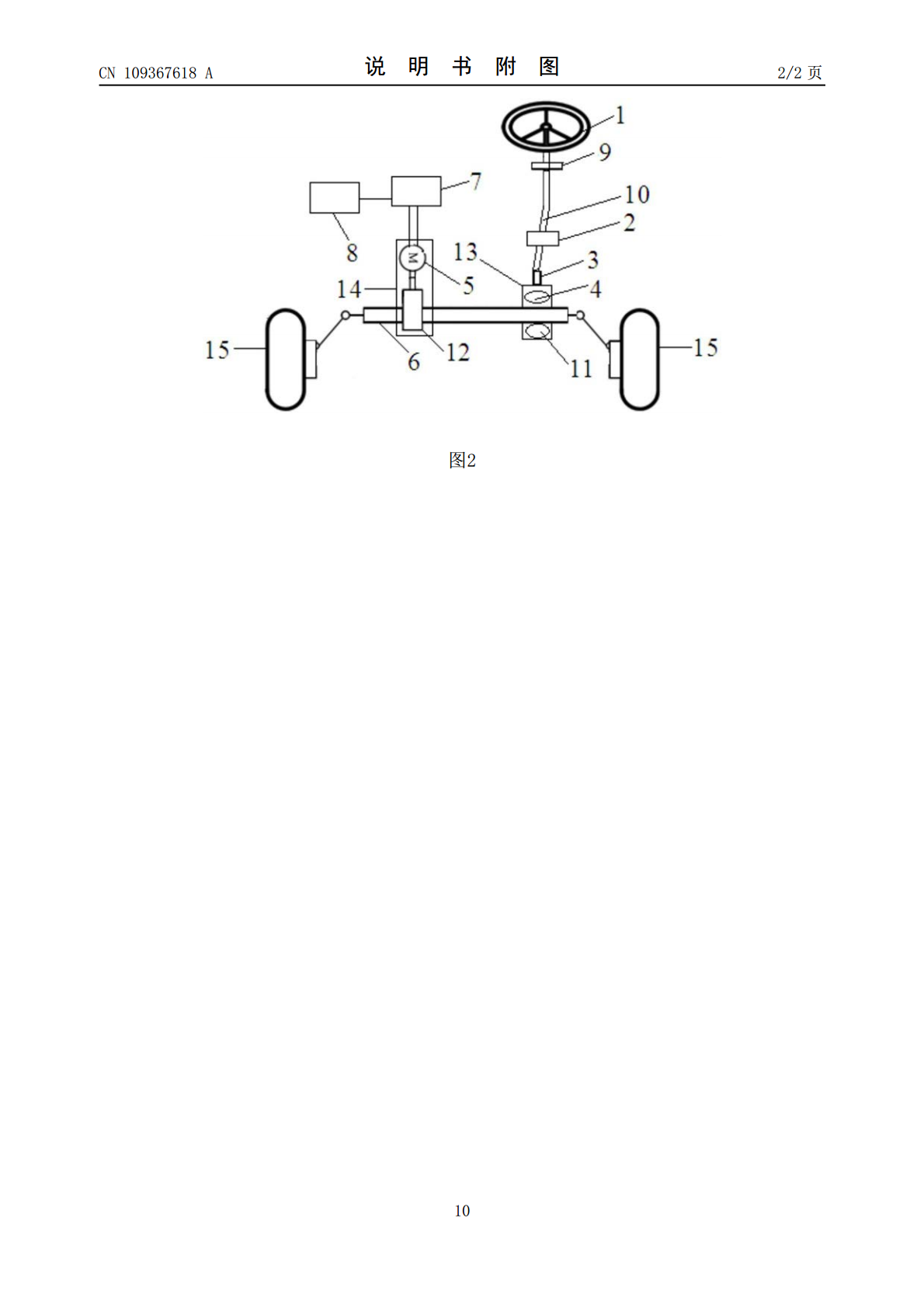
一种电动助力转向控制方法及系统.pdf
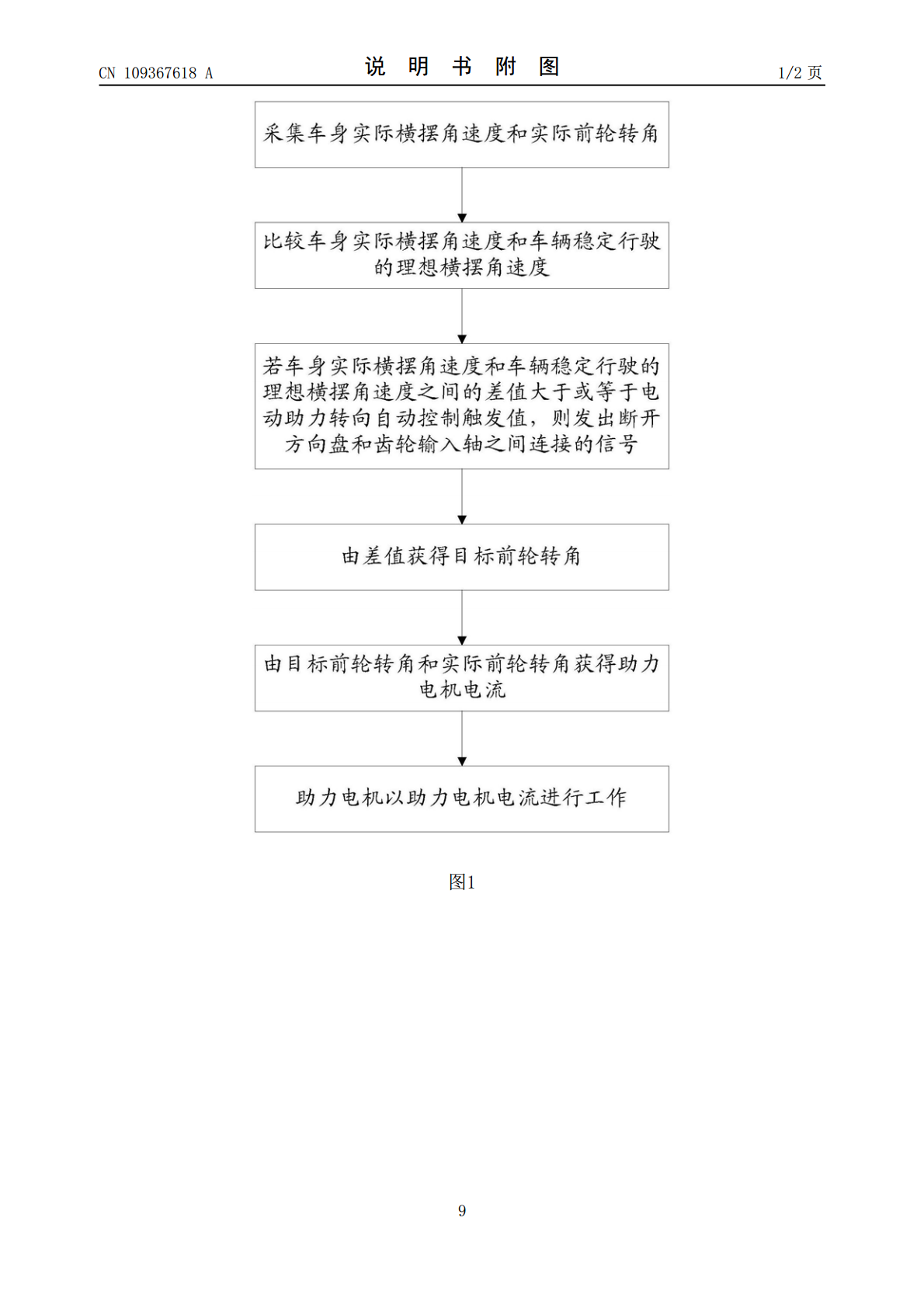
本发明公开了一种电动助力转向控制方法及系统,方法包括:采集车身实际横摆角速度和实际前轮转角;比较车身实际横摆角速度和车辆稳定行驶的理想横摆角速度;若车身实际横摆角速度和车辆稳定行驶的理想横摆角速度之间的差值大于或等于电动助力转向自动控制触发值,则发出断开方向盘和齿轮输入轴之间连接的信号;由差值获得目标前轮转角;由目标前轮转角和实际前轮转角获得助力电机电流;助力电机以助力电机电流进行工作。本发明的电动助力转向控制方法可在危险转向工况下断开方向盘和齿轮输入轴之间的连接,使得整车的转向由电动助力转向系统进行自动
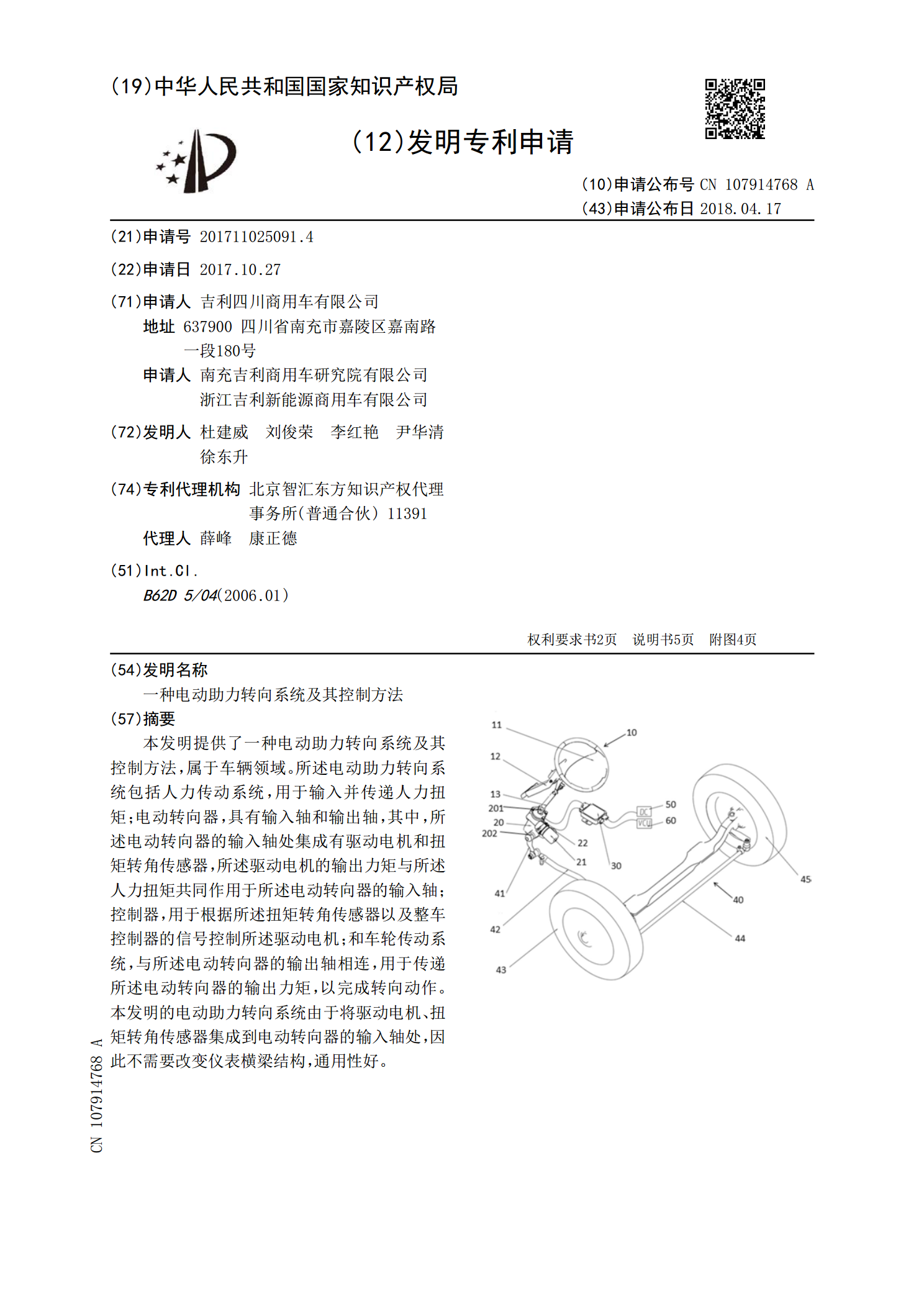
一种电动助力转向系统及其控制方法.pdf
本发明提供了一种电动助力转向系统及其控制方法,属于车辆领域。所述电动助力转向系统包括人力传动系统,用于输入并传递人力扭矩;电动转向器,具有输入轴和输出轴,其中,所述电动转向器的输入轴处集成有驱动电机和扭矩转角传感器,所述驱动电机的输出力矩与所述人力扭矩共同作用于所述电动转向器的输入轴;控制器,用于根据所述扭矩转角传感器以及整车控制器的信号控制所述驱动电机;和车轮传动系统,与所述电动转向器的输出轴相连,用于传递所述电动转向器的输出力矩,以完成转向动作。本发明的电动助力转向系统由于将驱动电机、扭矩转角传感器集
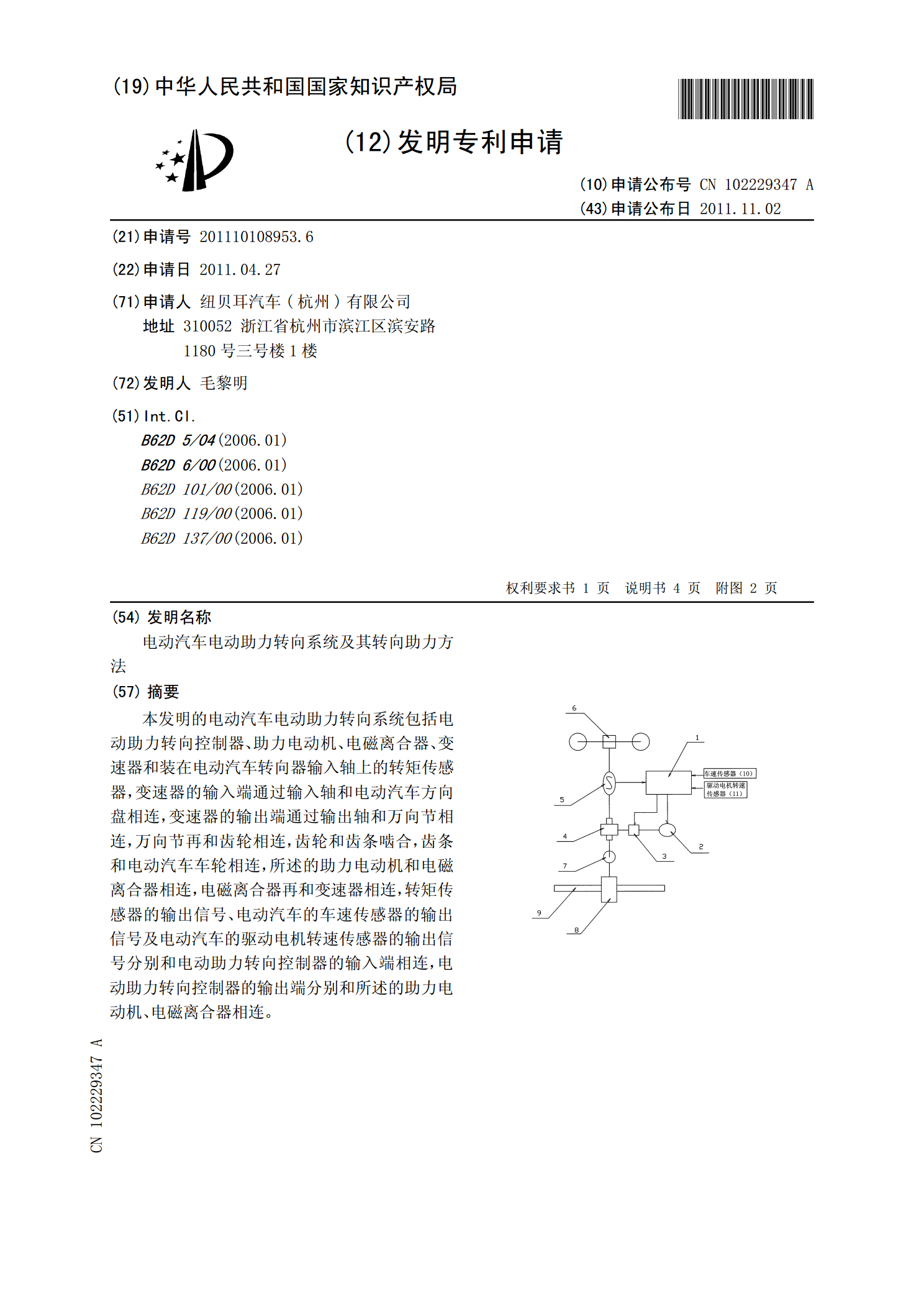
电动汽车电动助力转向系统及其转向助力方法.pdf
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机