
一种弧齿锥齿轮载荷弹性接触变形数值计算方法.pdf

书生****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种弧齿锥齿轮载荷弹性接触变形数值计算方法.pdf
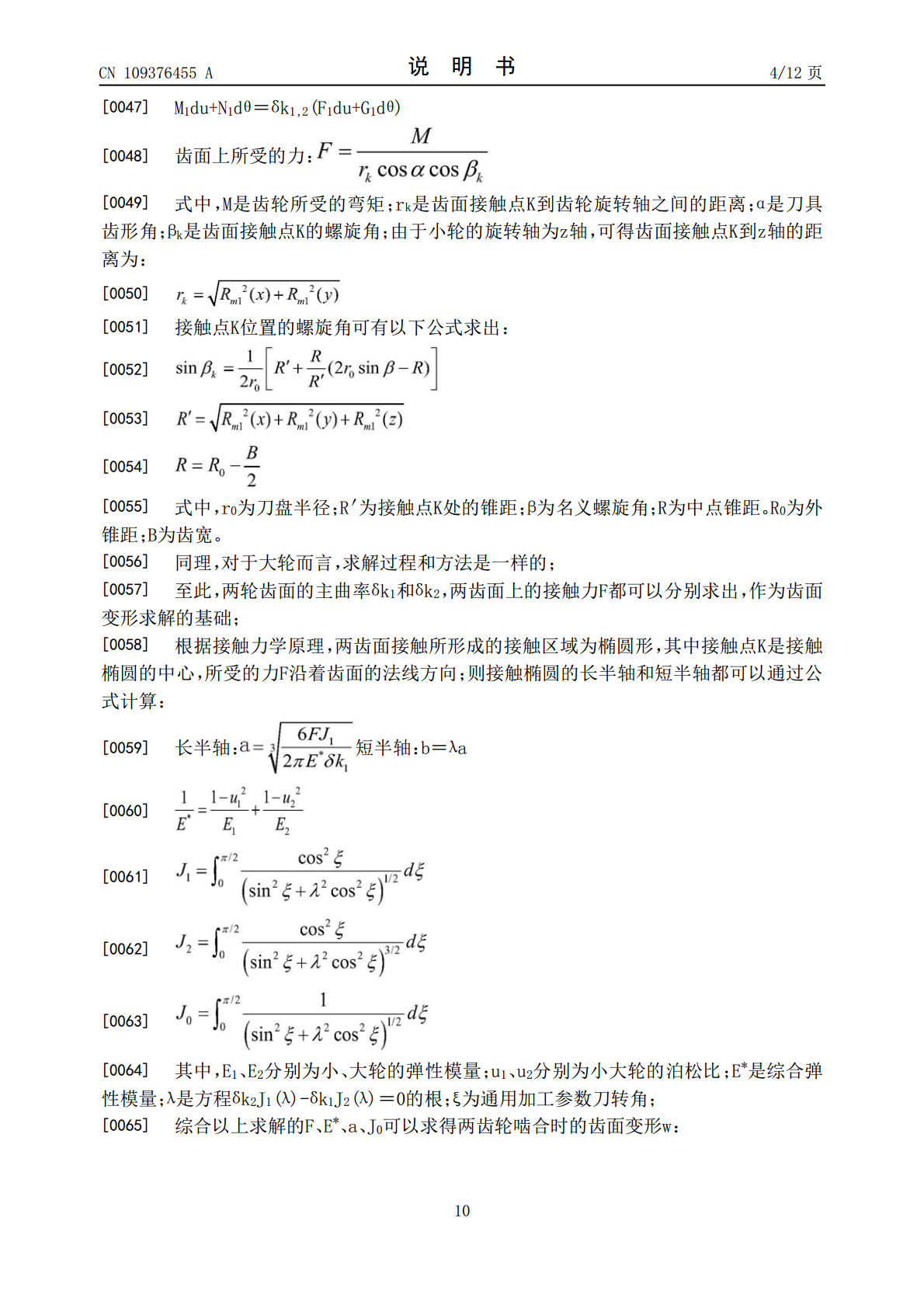
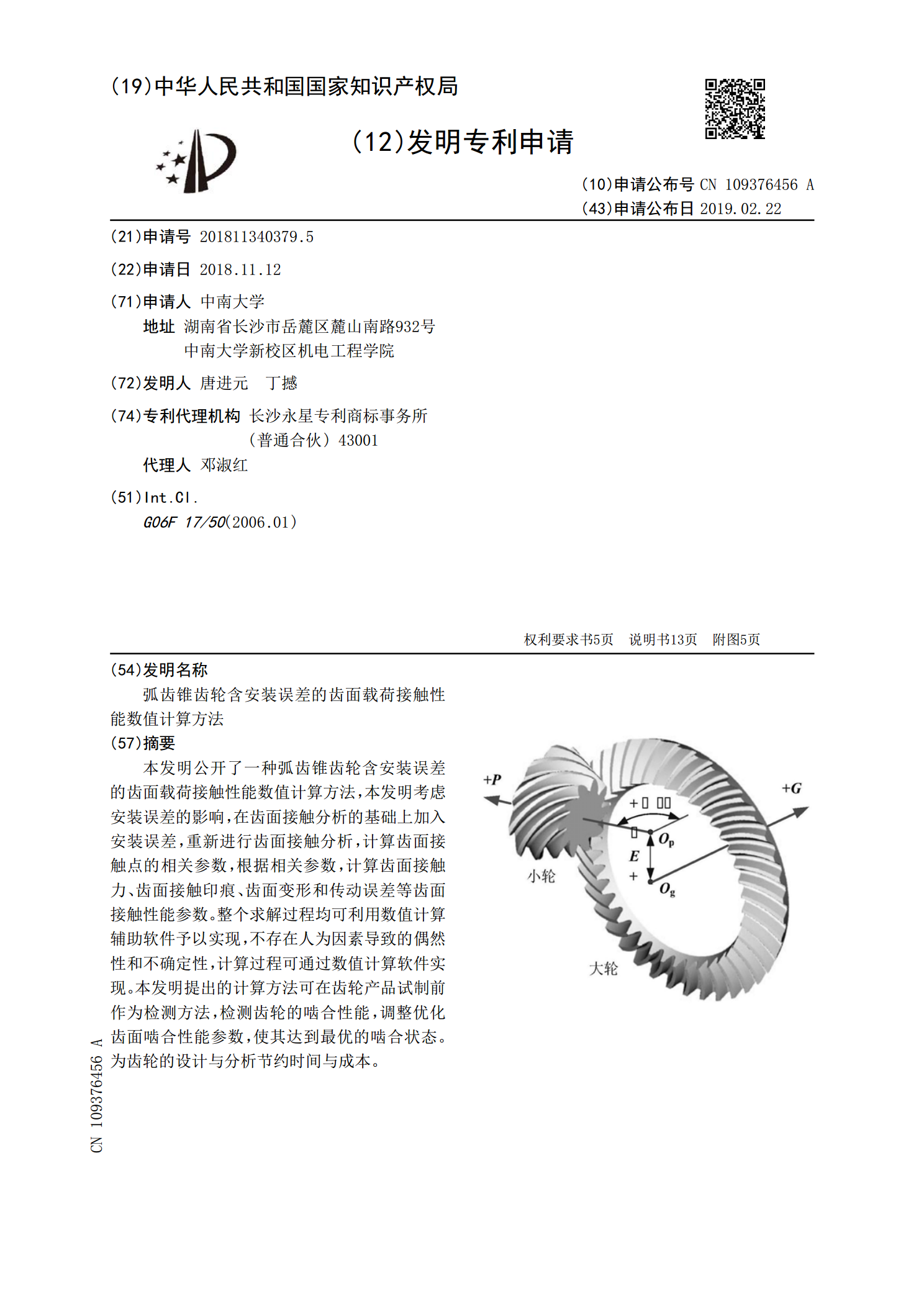
本发明公开了一种弧齿锥齿轮载荷弹性接触变形数值计算方法,在齿面接触分析的基础上提出,并分别考虑了单齿啮合和双齿啮合状态下的齿面接触变形,完成了整个啮合周期的齿面接触变形计算。本发明提出的齿面变形解析计算中,载荷是对齿面变形影响较大的一个重要因素。在双齿啮合条件下,齿面上所受的接触力要小于单齿啮合条件下的齿面接触力;双齿啮合条件下的齿面变形要小于单齿啮合条件下的齿面变形。因为在双齿啮合时,由于有两对齿同时参与啮合,共同分担齿轮所受的载荷,齿面上的接触力会小于单齿啮合时齿面的接触力,导致双齿啮合条件下的齿面变
一种弧齿锥齿轮含误差的齿面载荷接触变形数值计算方法.pdf
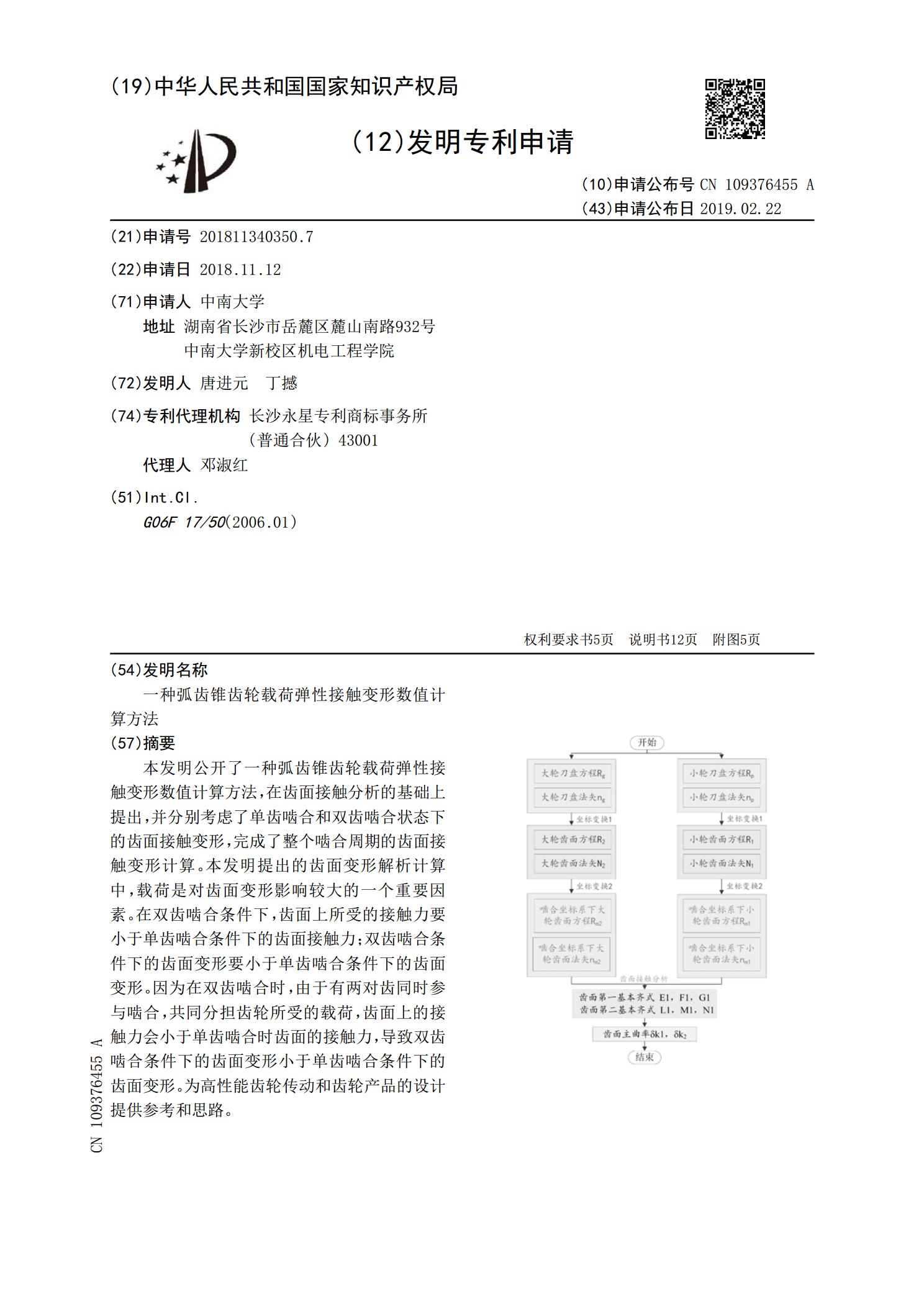
本发明公开了一种弧齿锥齿轮含误差的齿面载荷接触变形数值计算方法,是一种基于TCA求解过程之上的弧齿锥齿轮传动误差的数值计算方法,该方法考虑了不加载与加载情况下的齿轮的传动误差计算,并且分别计算了单齿啮合和双齿啮合条件下的传动误差。整个求解过程不存在偶然性和不确定性,所以,能保证求解结果的准确性。求解过程可通过软件实现,为齿轮设计与反调修正提供了一种思路和参考方案,为高精度弧齿锥齿轮传动提供了有意义的参考。
弧齿锥齿轮含安装误差的齿面载荷接触性能数值计算方法.pdf
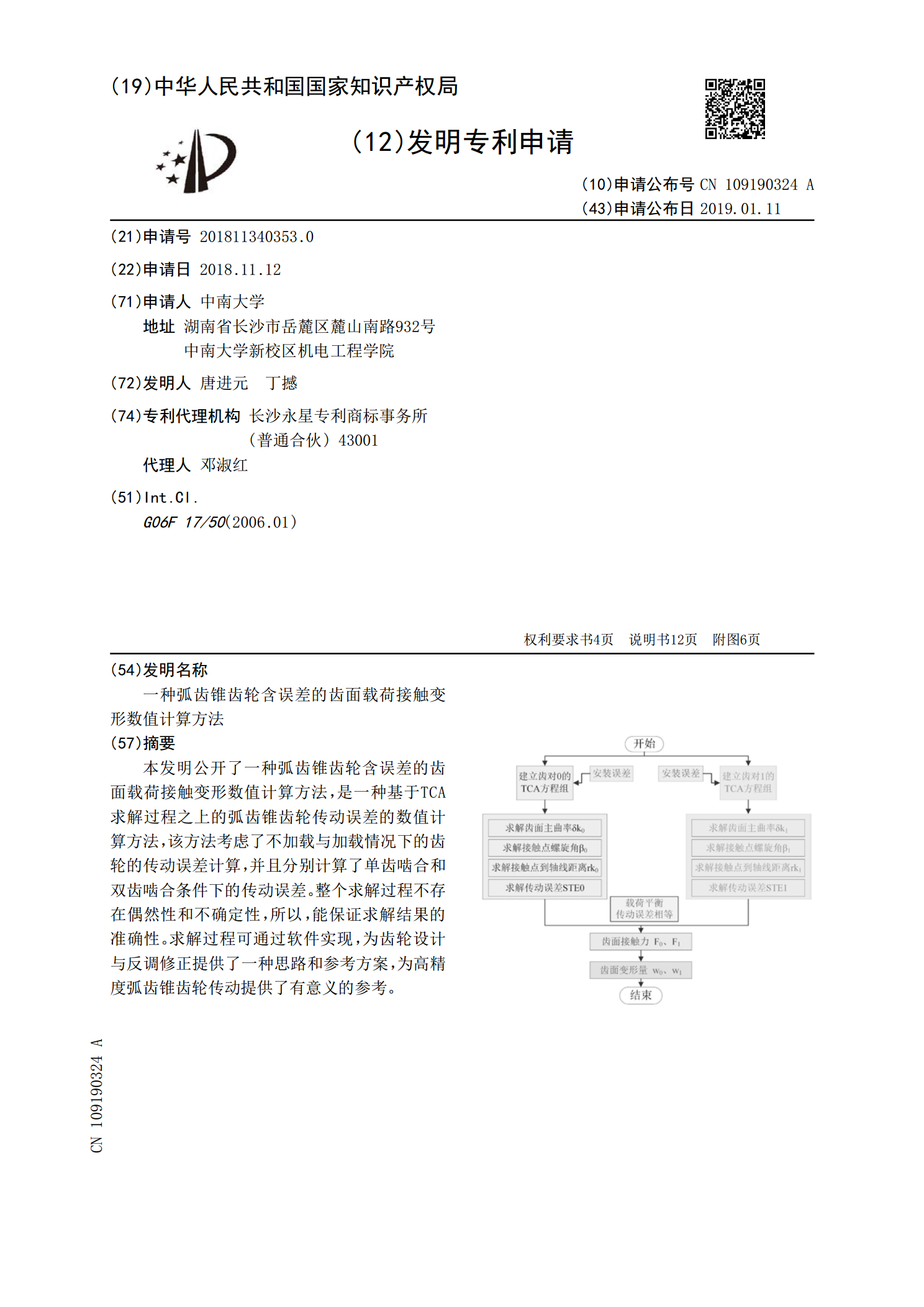
本发明公开了一种弧齿锥齿轮含安装误差的齿面载荷接触性能数值计算方法,本发明考虑安装误差的影响,在齿面接触分析的基础上加入安装误差,重新进行齿面接触分析,计算齿面接触点的相关参数,根据相关参数,计算齿面接触力、齿面接触印痕、齿面变形和传动误差等齿面接触性能参数。整个求解过程均可利用数值计算辅助软件予以实现,不存在人为因素导致的偶然性和不确定性,计算过程可通过数值计算软件实现。本发明提出的计算方法可在齿轮产品试制前作为检测方法,检测齿轮的啮合性能,调整优化齿面啮合性能参数,使其达到最优的啮合状态。为齿轮的设计
一种弧齿锥齿轮齿面载荷接触性能参数的数值计算方法.pdf
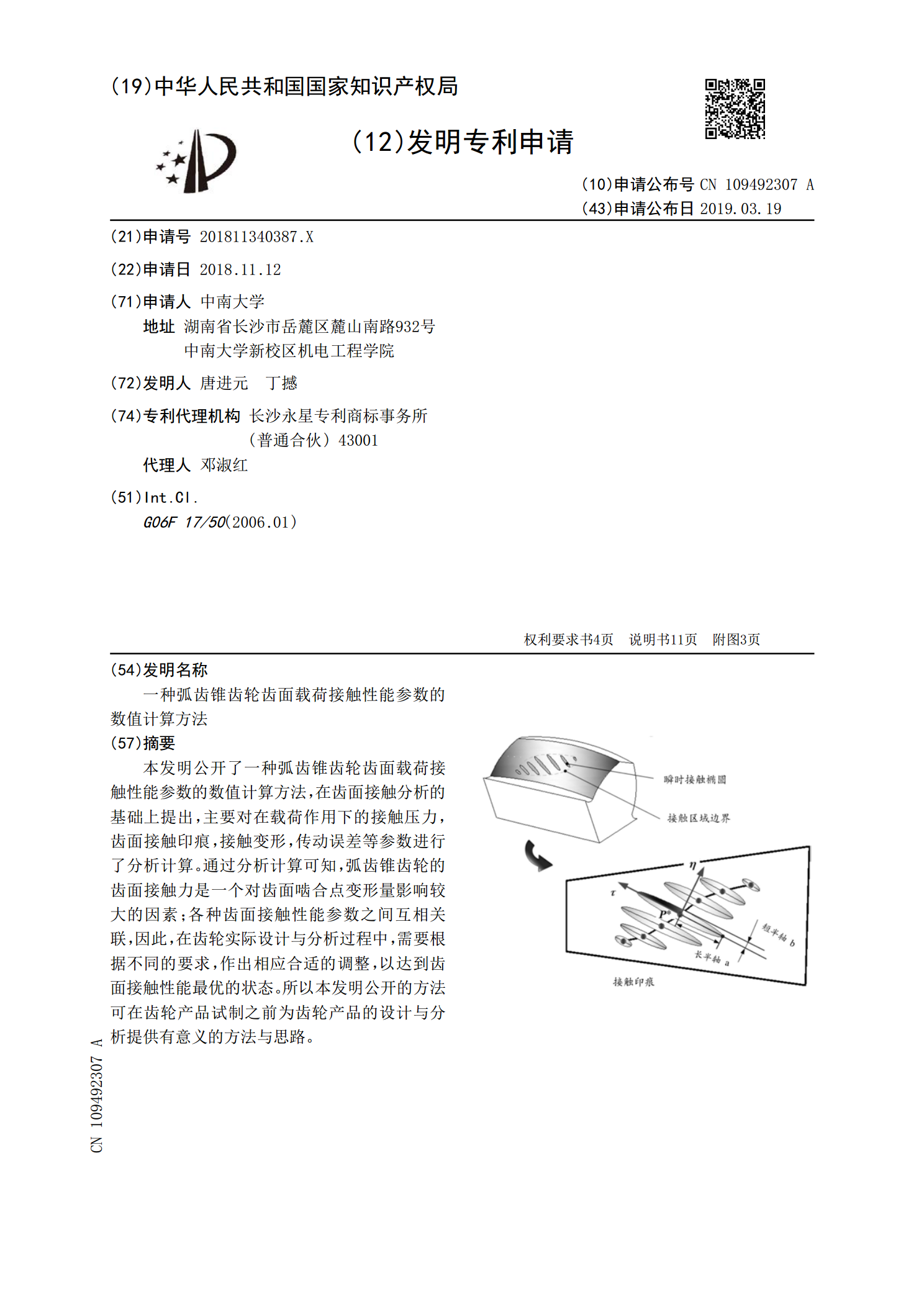
本发明公开了一种弧齿锥齿轮齿面载荷接触性能参数的数值计算方法,在齿面接触分析的基础上提出,主要对在载荷作用下的接触压力,齿面接触印痕,接触变形,传动误差等参数进行了分析计算。通过分析计算可知,弧齿锥齿轮的齿面接触力是一个对齿面啮合点变形量影响较大的因素;各种齿面接触性能参数之间互相关联,因此,在齿轮实际设计与分析过程中,需要根据不同的要求,作出相应合适的调整,以达到齿面接触性能最优的状态。所以本发明公开的方法可在齿轮产品试制之前为齿轮产品的设计与分析提供有意义的方法与思路。
一种弧齿锥齿轮载荷传动误差数值计算方法.pdf
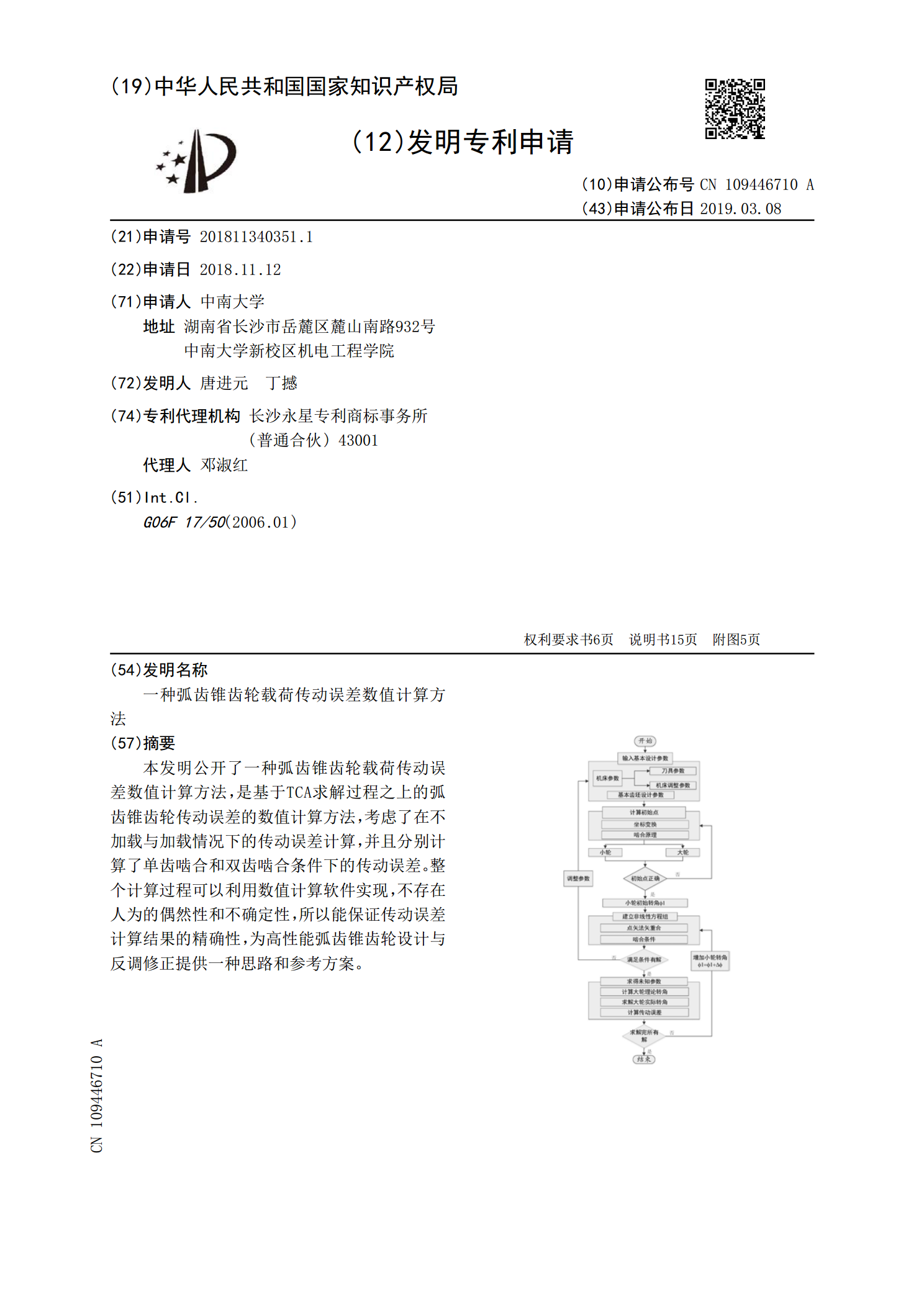
本发明公开了一种弧齿锥齿轮载荷传动误差数值计算方法,是基于TCA求解过程之上的弧齿锥齿轮传动误差的数值计算方法,考虑了在不加载与加载情况下的传动误差计算,并且分别计算了单齿啮合和双齿啮合条件下的传动误差。整个计算过程可以利用数值计算软件实现,不存在人为的偶然性和不确定性,所以能保证传动误差计算结果的精确性,为高性能弧齿锥齿轮设计与反调修正提供一种思路和参考方案。