
一种可移动式空间可调节双臂机器人底座装置.pdf

努力****爱静


1/6
2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可移动式空间可调节双臂机器人底座装置.pdf
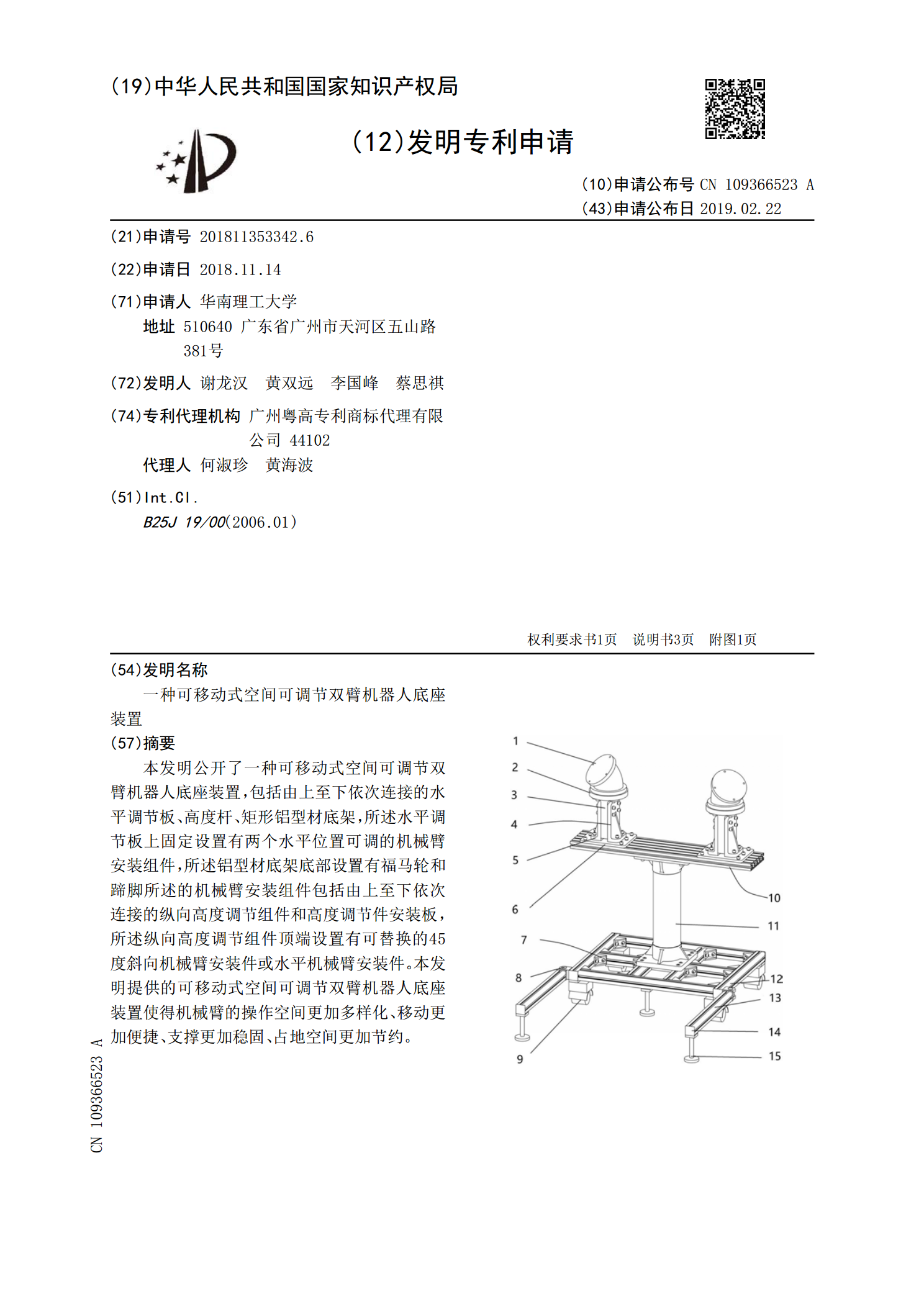
本发明公开了一种可移动式空间可调节双臂机器人底座装置,包括由上至下依次连接的水平调节板、高度杆、矩形铝型材底架,所述水平调节板上固定设置有两个水平位置可调的机械臂安装组件,所述铝型材底架底部设置有福马轮和蹄脚所述的机械臂安装组件包括由上至下依次连接的纵向高度调节组件和高度调节件安装板,所述纵向高度调节组件顶端设置有可替换的45度斜向机械臂安装件或水平机械臂安装件。本发明提供的可移动式空间可调节双臂机器人底座装置使得机械臂的操作空间更加多样化、移动更加便捷、支撑更加稳固、占地空间更加节约。
一种具有可移动式散热底座的码垛机器人.pdf
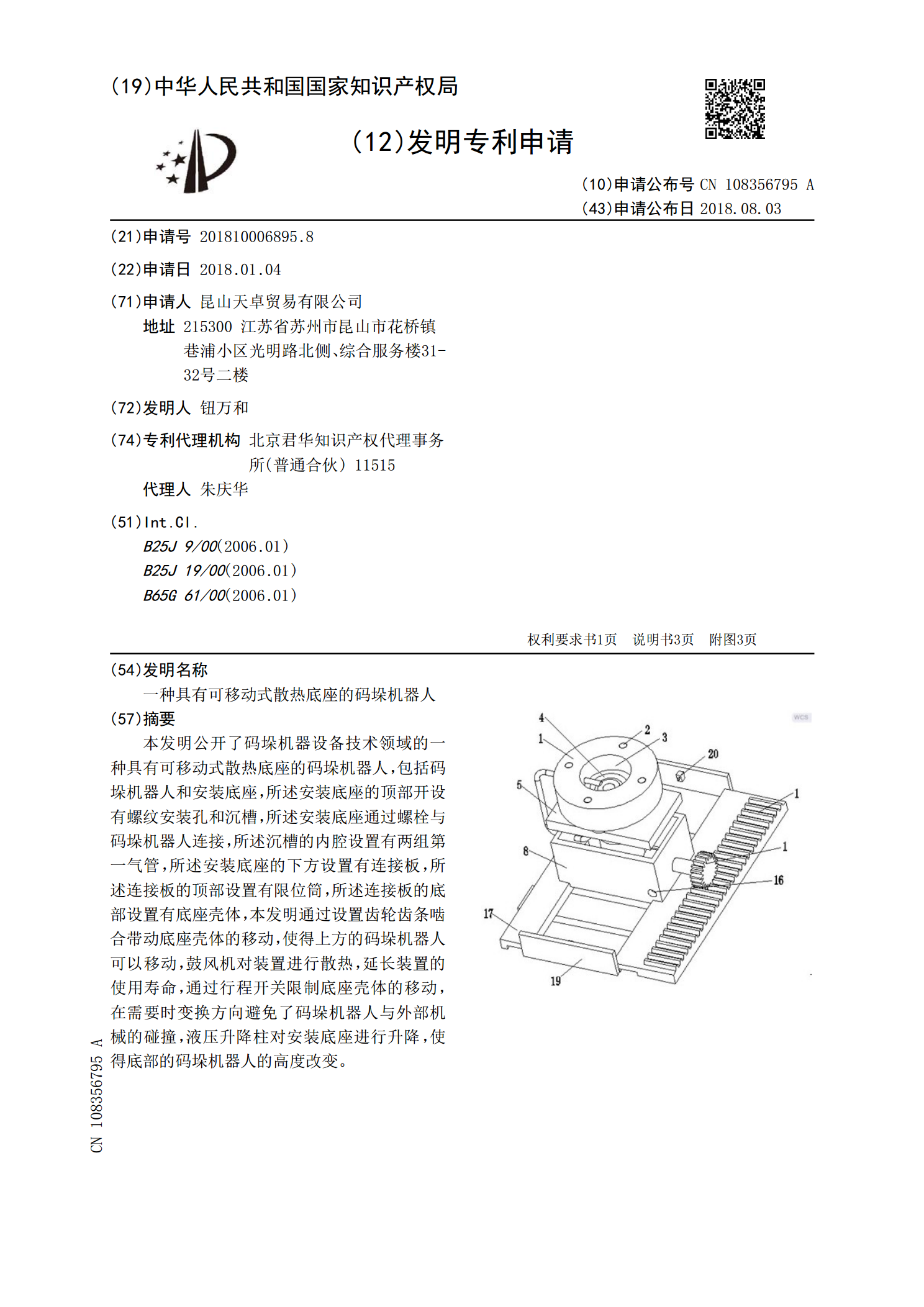
本发明公开了码垛机器设备技术领域的一种具有可移动式散热底座的码垛机器人,包括码垛机器人和安装底座,所述安装底座的顶部开设有螺纹安装孔和沉槽,所述安装底座通过螺栓与码垛机器人连接,所述沉槽的内腔设置有两组第一气管,所述安装底座的下方设置有连接板,所述连接板的顶部设置有限位筒,所述连接板的底部设置有底座壳体,本发明通过设置齿轮齿条啮合带动底座壳体的移动,使得上方的码垛机器人可以移动,鼓风机对装置进行散热,延长装置的使用寿命,通过行程开关限制底座壳体的移动,在需要时变换方向避免了码垛机器人与外部机械的碰撞,液压
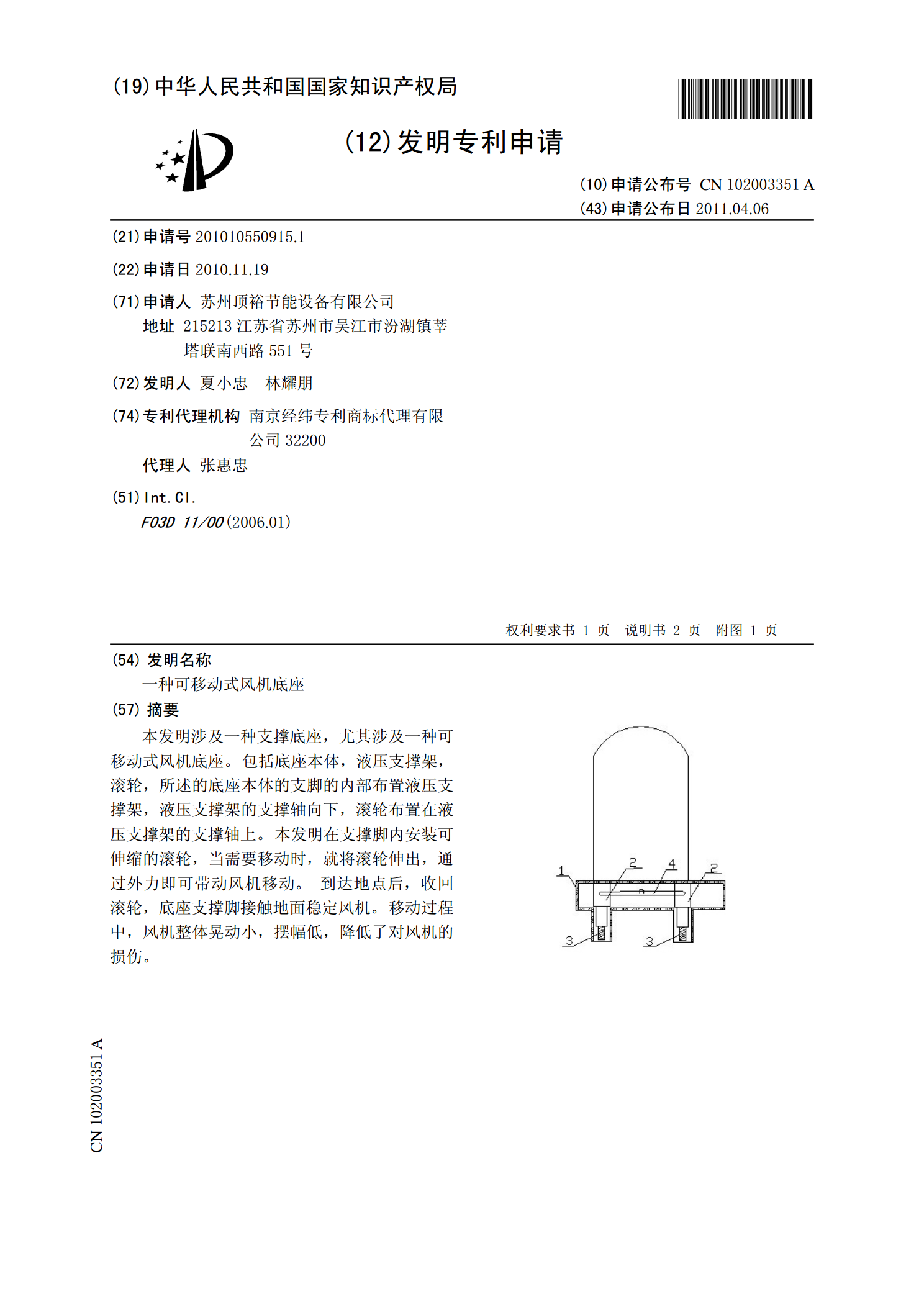
一种可移动式风机底座.pdf
本发明涉及一种支撑底座,尤其涉及一种可移动式风机底座。包括底座本体,液压支撑架,滚轮,所述的底座本体的支脚的内部布置液压支撑架,液压支撑架的支撑轴向下,滚轮布置在液压支撑架的支撑轴上。本发明在支撑脚内安装可伸缩的滚轮,当需要移动时,就将滚轮伸出,通过外力即可带动风机移动。到达地点后,收回滚轮,底座支撑脚接触地面稳定风机。移动过程中,风机整体晃动小,摆幅低,降低了对风机的损伤。

一种可移动式多自由度双臂协作机器人.pdf
本发明公开了一种轮式多自由度双臂协作机器人,包括一对机械臂、轮式移动底盘、机器人躯干、云台相机模块及深度相机模块。所述机械臂具有六自由度,带有力反馈,可以保证安全性;所述移动底盘采用四轮独立驱动,并安装有雷达、图传系统,可以实现全向移动、即时定位、自主导航、自主避障、远程操控;所述机器人躯干具有三自由度,由升降机构、旋转机构、俯仰机构组成,可以实现升降、转身、俯仰动作,调整机器人姿态,满足复杂任务需求;所述云台相机模块安装于躯干顶部,可实现360度旋转与全景视频图像的获取。本发明可以满足高危及特殊环境下的
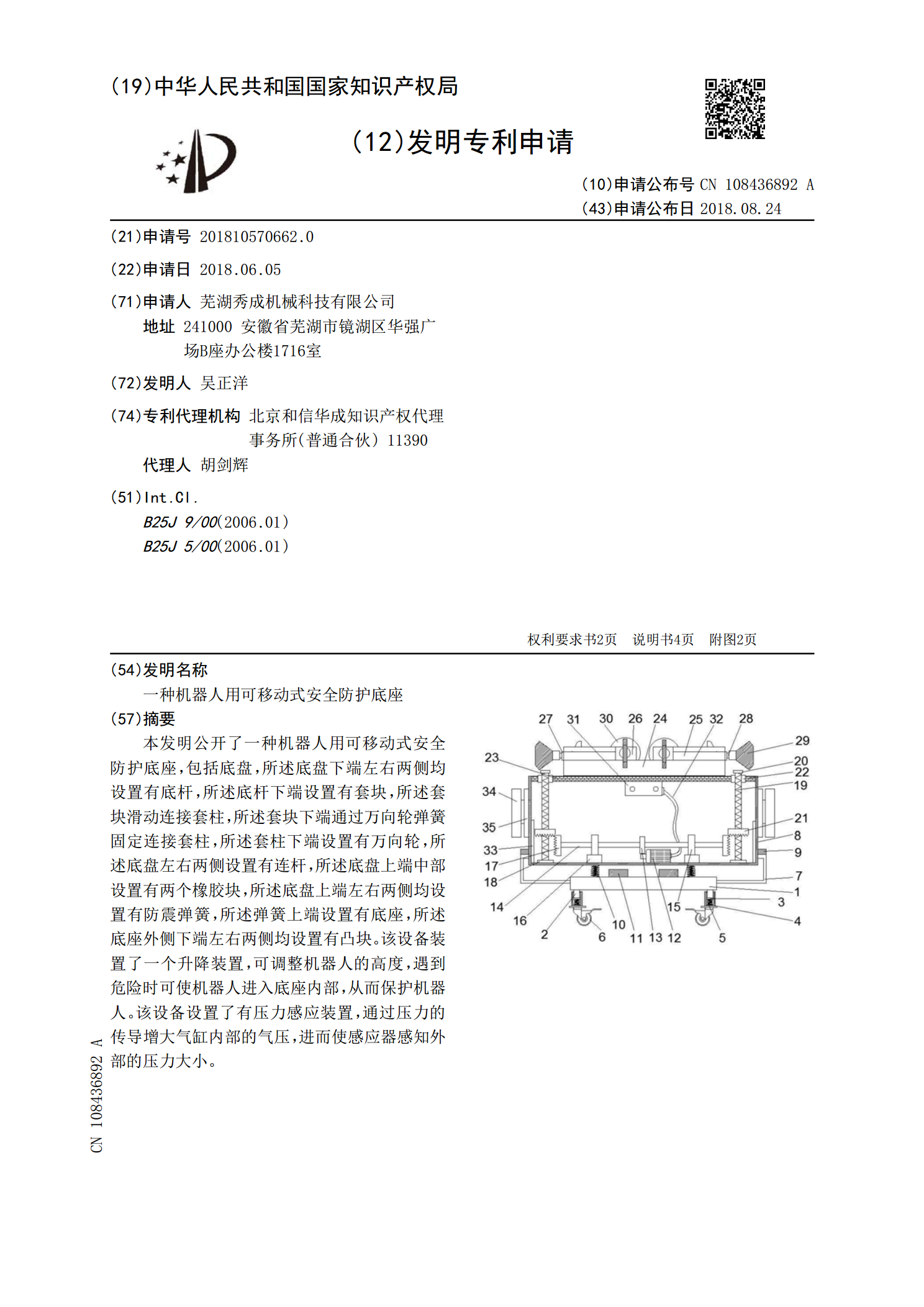
一种机器人用可移动式安全防护底座.pdf
本发明公开了一种机器人用可移动式安全防护底座,包括底盘,所述底盘下端左右两侧均设置有底杆,所述底杆下端设置有套块,所述套块滑动连接套柱,所述套块下端通过万向轮弹簧固定连接套柱,所述套柱下端设置有万向轮,所述底盘左右两侧设置有连杆,所述底盘上端中部设置有两个橡胶块,所述底盘上端左右两侧均设置有防震弹簧,所述弹簧上端设置有底座,所述底座外侧下端左右两侧均设置有凸块。该设备装置了一个升降装置,可调整机器人的高度,遇到危险时可使机器人进入底座内部,从而保护机器人。该设备设置了有压力感应装置,通过压力的传导增大气缸