
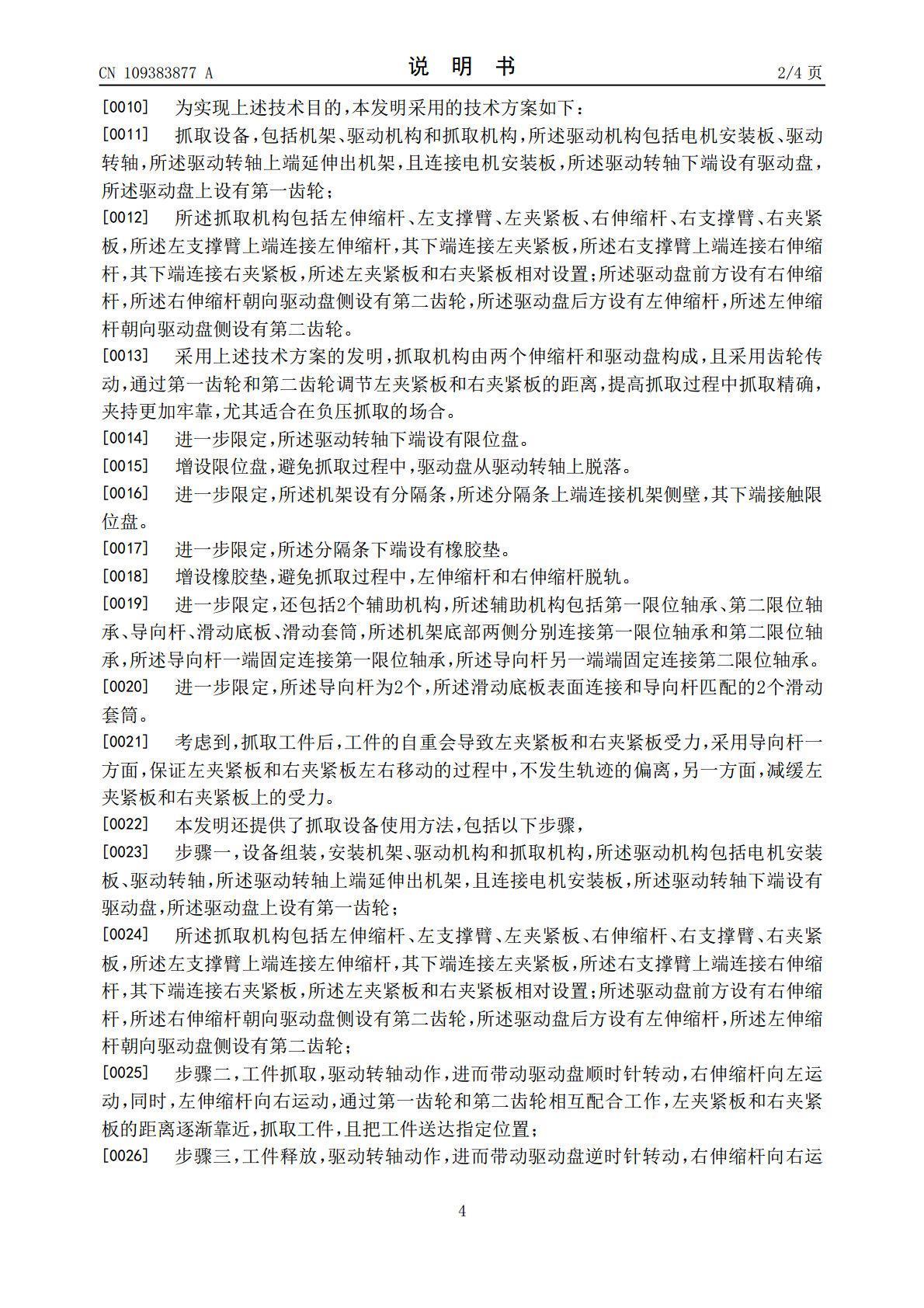
抓取设备及其使用方法.pdf

一吃****昕靓


1/8

2/8

3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
抓取设备及其使用方法.pdf
本发明公开了一种抓取设备,涉及运输作业,用于解决现有的抓取机构抓取精确降低,且单指夹持不牢靠,不适合在负压抓取的场合。它包括机架、驱动机构和抓取机构,所述驱动机构包括电机安装板、驱动转轴,所述驱动转轴上端延伸出机架,且连接电机安装板,所述驱动转轴下端设有驱动盘,所述驱动盘上设有第一齿轮。本发明的抓取机构由两个伸缩杆和驱动盘构成,且采用齿轮传动,通过第一齿轮和第二齿轮调节左夹紧板和右夹紧板的距离,提高抓取过程中抓取精确,夹持更加牢靠,尤其适合在负压抓取的场合。本发明还公开了一种抓取设备使用方法。
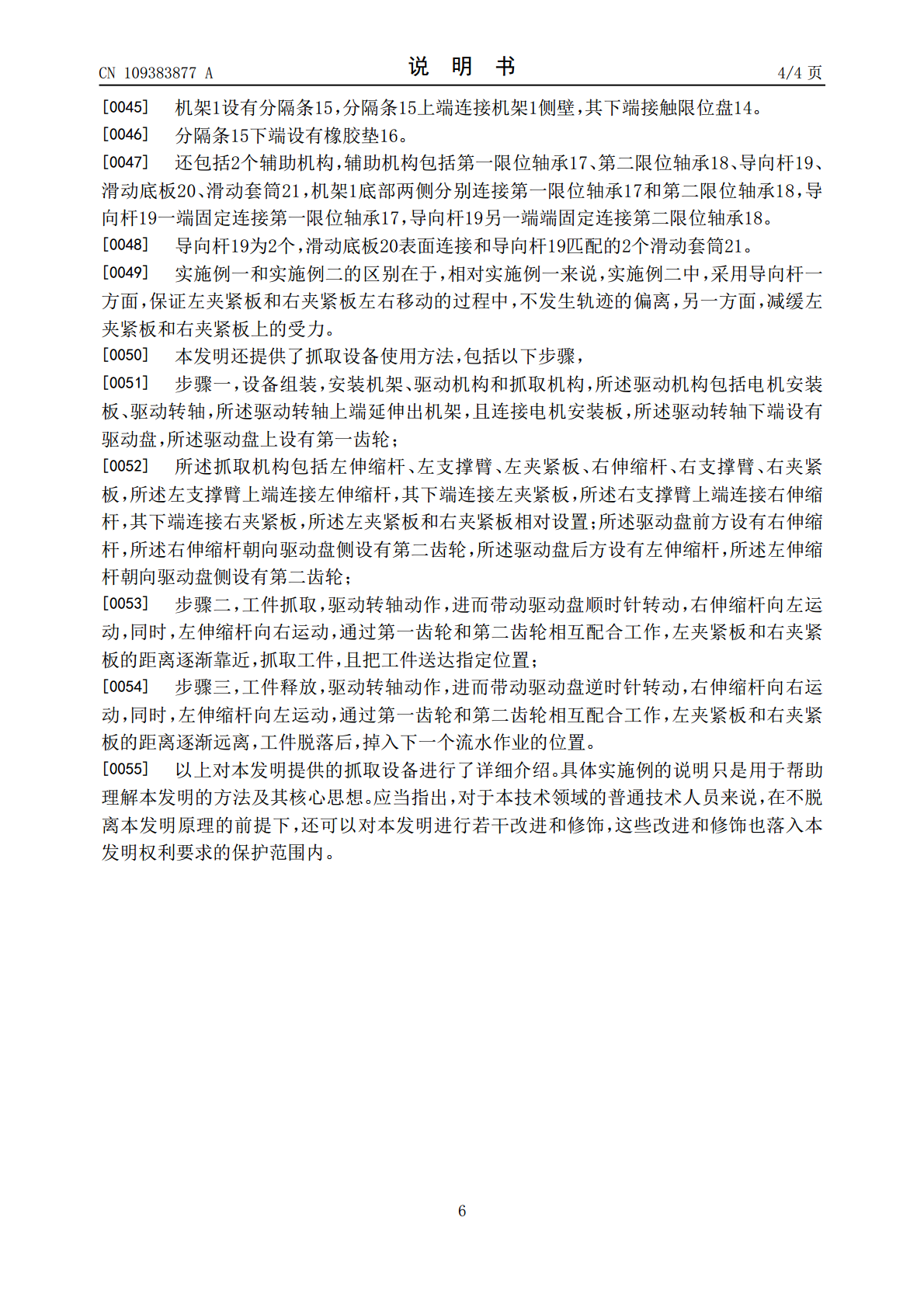
齿轮加工抓取夹具及其使用方法.pdf
本发明涉及一种齿轮加工抓取夹具,包括夹具主体及连接在夹具主体上的夹爪和第一气缸组,所述夹具主体包括主体外部组件及位于主体外部组件内部的夹持转动机构和连接机构,夹持转动机构和连接机构连接为一体;所述夹持转动机构一端连接第一气缸组,所述夹爪设置在第一气缸组端部。本发明智能抓取齿轮,并使齿轮可圆周随动,保证齿轮在装入薄膜卡盘时齿齿啮合,无需调节直接可以装入,抓取稳定,装配精度高,并减少了抓取时间,提高了抓取效率;通过设置导板、导销及第三气缸组,从而可以调节夹具与齿轮的夹取角度,保证夹取后齿轮、夹具及薄膜卡盘三者

一种机械制造抓取装置及其使用方法.pdf
本发明公开了一种机械制造抓取装置,包括机械臂、过线环、上板架、下板架、吸盘抓取组件、三通阀,所述机械臂的一端固定在生产线侧边的安装支架上,且机械臂的另一端通过螺栓固定连接上板架上焊接的连接耳,上板架的下方设置有下板架,上板架和下板架之间连接多个吸盘抓取组件,其中吸盘抓取组件的吸盘位于下板架的下方,而下板架的抽气孔连接三通阀的一个端口。本发明通过上板架和下板架而两只支架固定的管状连接杆能够构成稳固的支架结构,为抓取物品材料提供稳定的结构基础;本发明通过设置导杆触发开关的结构能够实时的时间吸盘抓取闹固度的监测

钢卷定位抓取出入库系统及其使用方法.pdf
本发明提出了钢卷定位抓取出入库系统及其使用方法,PLC控制模块控制横梁沿着天车水平移动;PLC控制模块控制垂降车垂直于水平面运动;垂降车还包括吊具夹钳,PLC控制模块控制吊具夹钳用于夹取和取放钢卷;主扫描仪固定设置在横梁一端,副扫描仪固定设置在横梁另一端;主扫描仪和副扫描仪获取盛放钢卷的库区点云数据,同时通过标定参数将点云数据合成到世界坐标系中;通过主扫描仪和副扫描仪获得点云数据,对操作人员要求较低,精度较高;利用拟合算法计算转换矩阵,减少了误差;PLC控制模块控制横梁、垂降车和吊具夹钳,抓取精度更高,抓
抓取面挂的设备及其方法.pdf
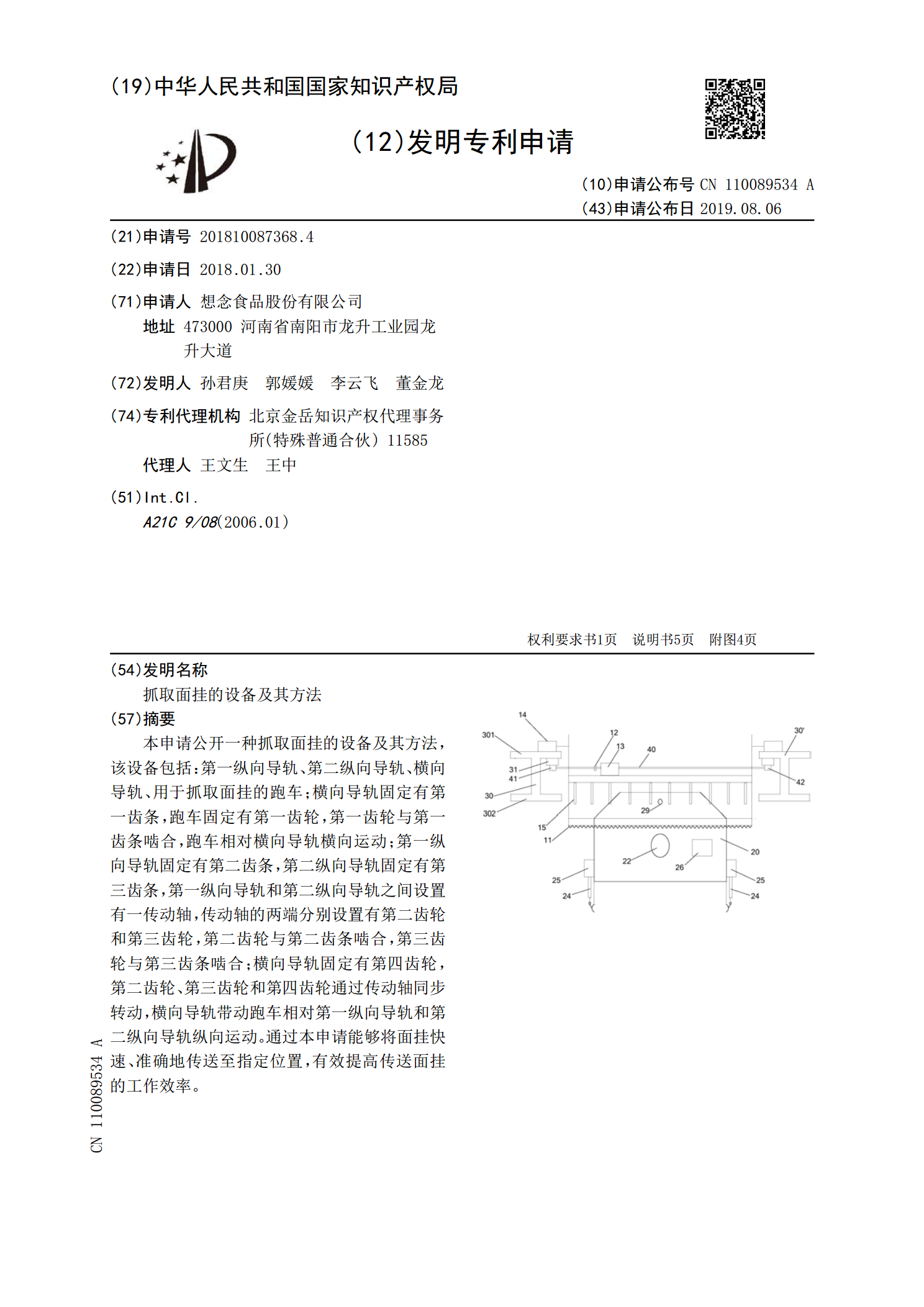
本申请公开一种抓取面挂的设备及其方法,该设备包括:第一纵向导轨、第二纵向导轨、横向导轨、用于抓取面挂的跑车;横向导轨固定有第一齿条,跑车固定有第一齿轮,第一齿轮与第一齿条啮合,跑车相对横向导轨横向运动;第一纵向导轨固定有第二齿条,第二纵向导轨固定有第三齿条,第一纵向导轨和第二纵向导轨之间设置有一传动轴,传动轴的两端分别设置有第二齿轮和第三齿轮,第二齿轮与第二齿条啮合,第三齿轮与第三齿条啮合;横向导轨固定有第四齿轮,第二齿轮、第三齿轮和第四齿轮通过传动轴同步转动,横向导轨带动跑车相对第一纵向导轨和第二纵向导