
伞齿轮式电动夹爪机构.pdf

山柳****魔王

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
伞齿轮式电动夹爪机构.pdf
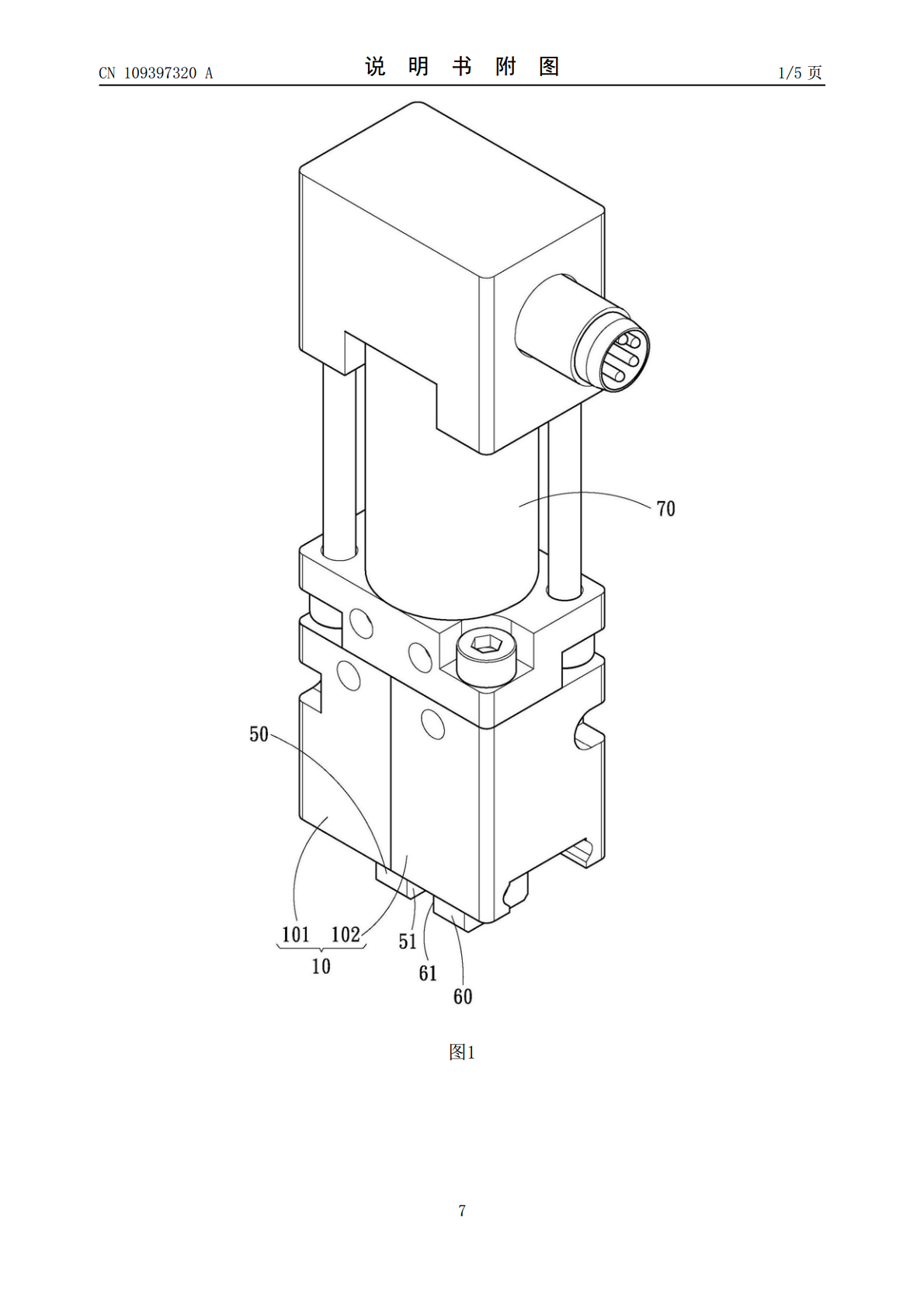
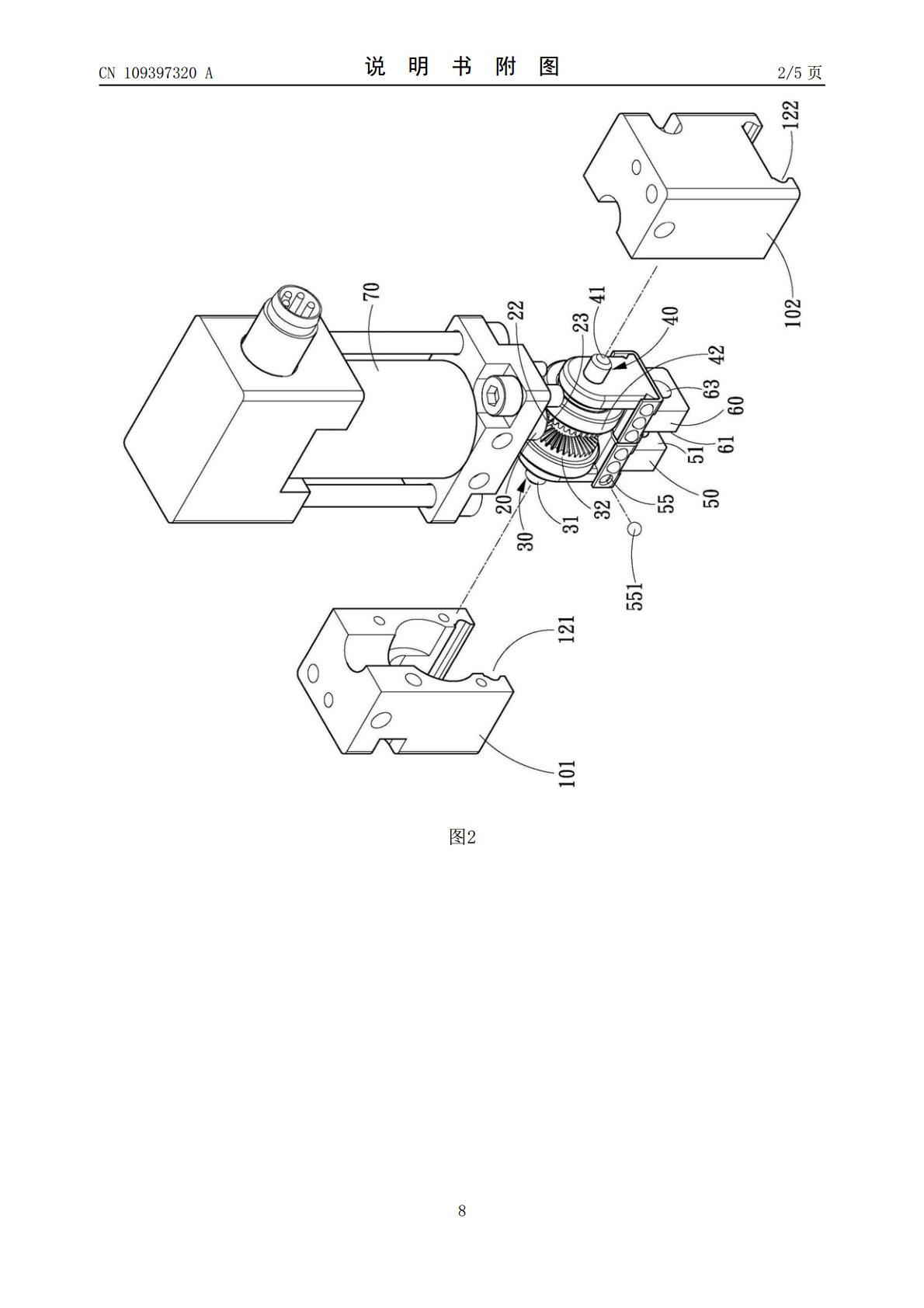
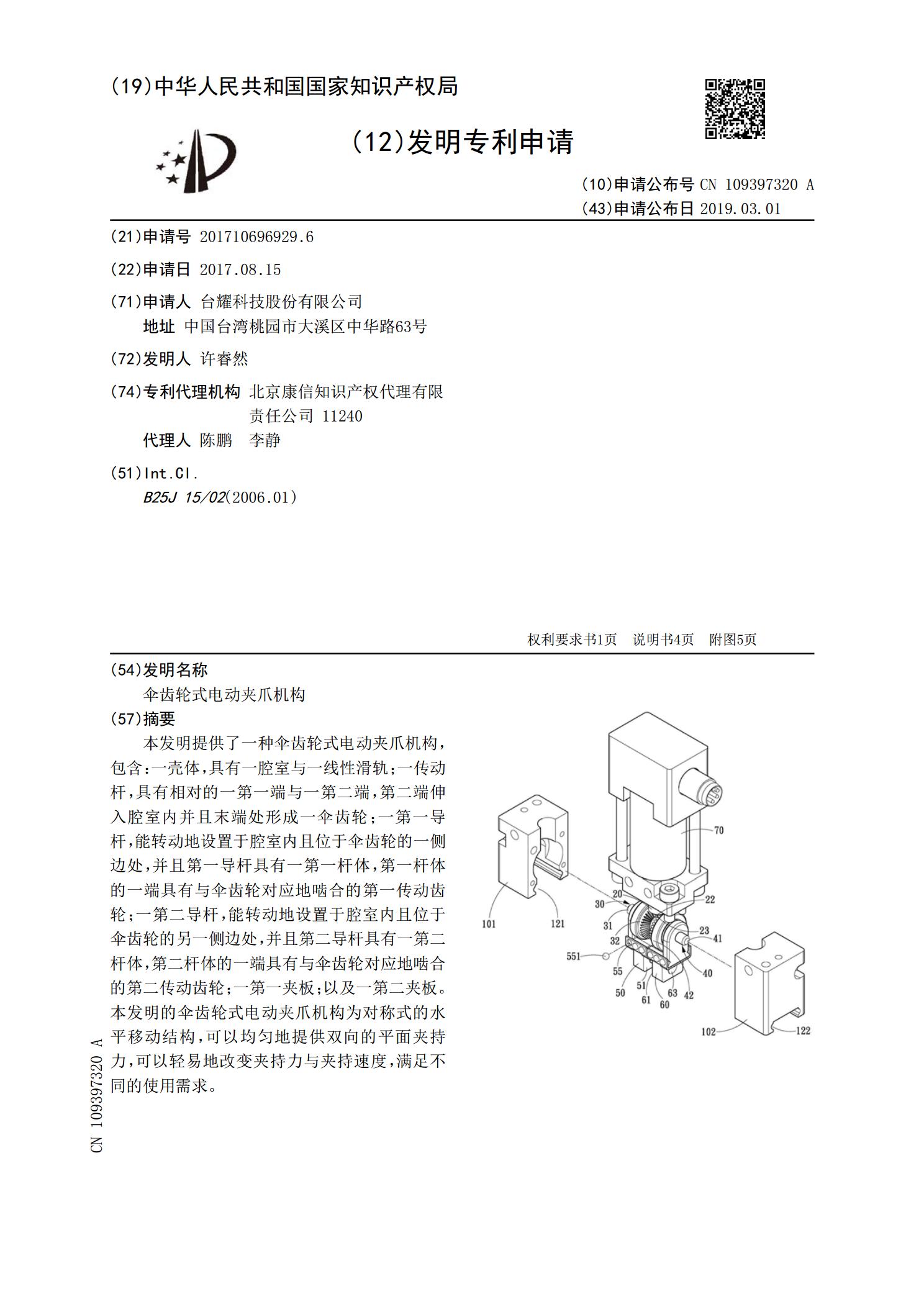
本发明提供了一种伞齿轮式电动夹爪机构,包含:一壳体,具有一腔室与一线性滑轨;一传动杆,具有相对的一第一端与一第二端,第二端伸入腔室内并且末端处形成一伞齿轮;一第一导杆,能转动地设置于腔室内且位于伞齿轮的一侧边处,并且第一导杆具有一第一杆体,第一杆体的一端具有与伞齿轮对应地啮合的第一传动齿轮;一第二导杆,能转动地设置于腔室内且位于伞齿轮的另一侧边处,并且第二导杆具有一第二杆体,第二杆体的一端具有与伞齿轮对应地啮合的第二传动齿轮;一第一夹板;以及一第二夹板。本发明的伞齿轮式电动夹爪机构为对称式的水平移动结构,
电动夹爪.pdf
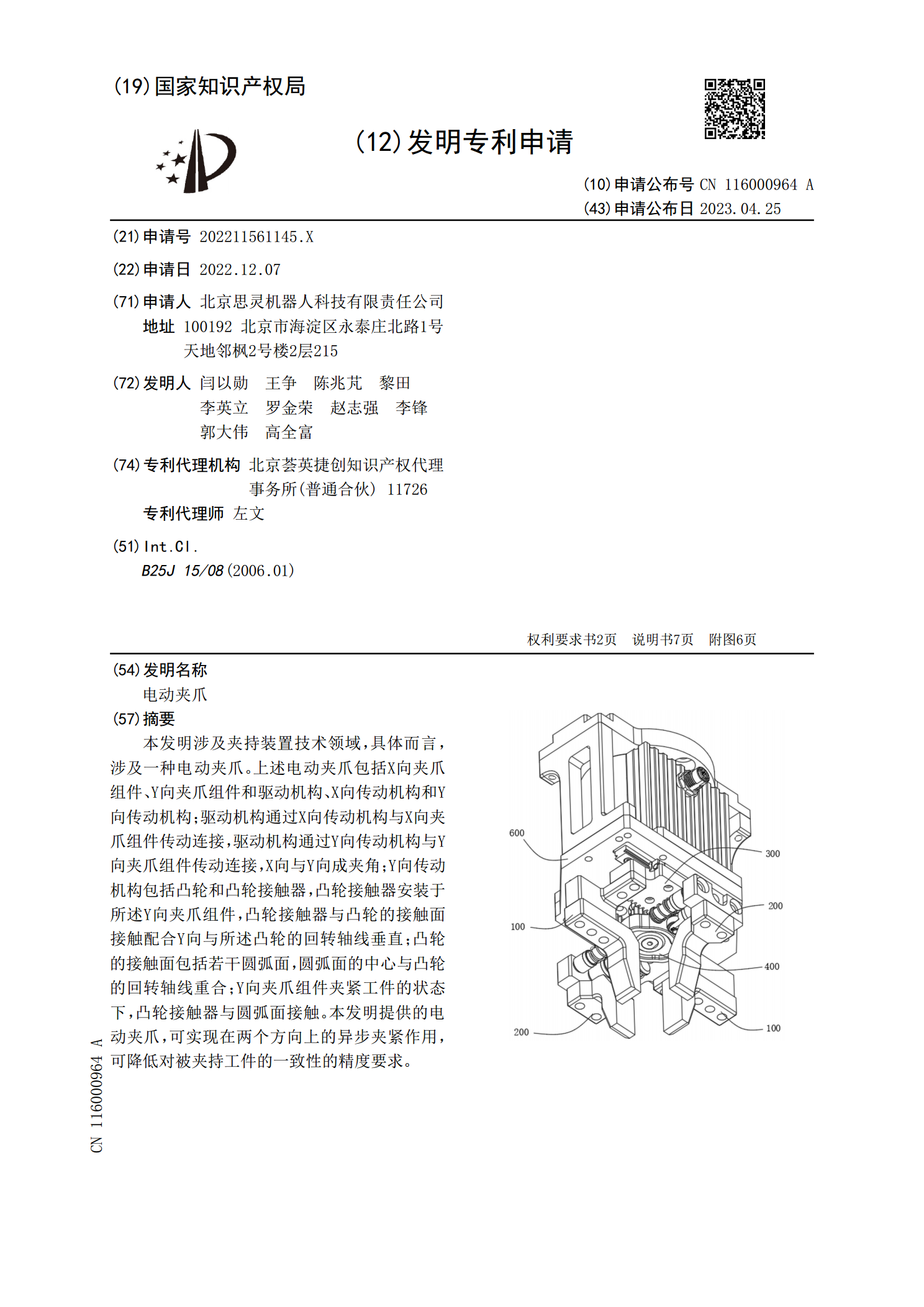
本发明涉及夹持装置技术领域,具体而言,涉及一种电动夹爪。上述电动夹爪包括X向夹爪组件、Y向夹爪组件和驱动机构、X向传动机构和Y向传动机构;驱动机构通过X向传动机构与X向夹爪组件传动连接,驱动机构通过Y向传动机构与Y向夹爪组件传动连接,X向与Y向成夹角;Y向传动机构包括凸轮和凸轮接触器,凸轮接触器安装于所述Y向夹爪组件,凸轮接触器与凸轮的接触面接触配合Y向与所述凸轮的回转轴线垂直;凸轮的接触面包括若干圆弧面,圆弧面的中心与凸轮的回转轴线重合;Y向夹爪组件夹紧工件的状态下,凸轮接触器与圆弧面接触。本发明提供的

电动夹爪.pdf
一种电动夹爪,其滑动件具有上限位部、下限位部和安装位,齿条固定安装在安装位内。齿条至少啮合部从下限位部的上方向远离支撑壁的方向凸出于下限位部的限位面。再利用长支撑轴和短支撑轴与上限位部和下限位部进行配合,用于与滑动座的支撑壁一起对滑动件进行限位。该电动夹爪中齿条的下方为下限位部,其限位面整体向支撑壁一侧回缩,整个限位面均与齿轮传动机构的输出齿分离,在滑动件整个移动过程中都不与输出齿接触,因此不会影响输出齿与齿条的啮合,当需要进行大行程设计时,只需按照需要的行程加长滑动件、齿条以及其他部件的长度即可,无需改
夹爪驱动机构、夹爪机构以及线束夹爪移载装置.pdf
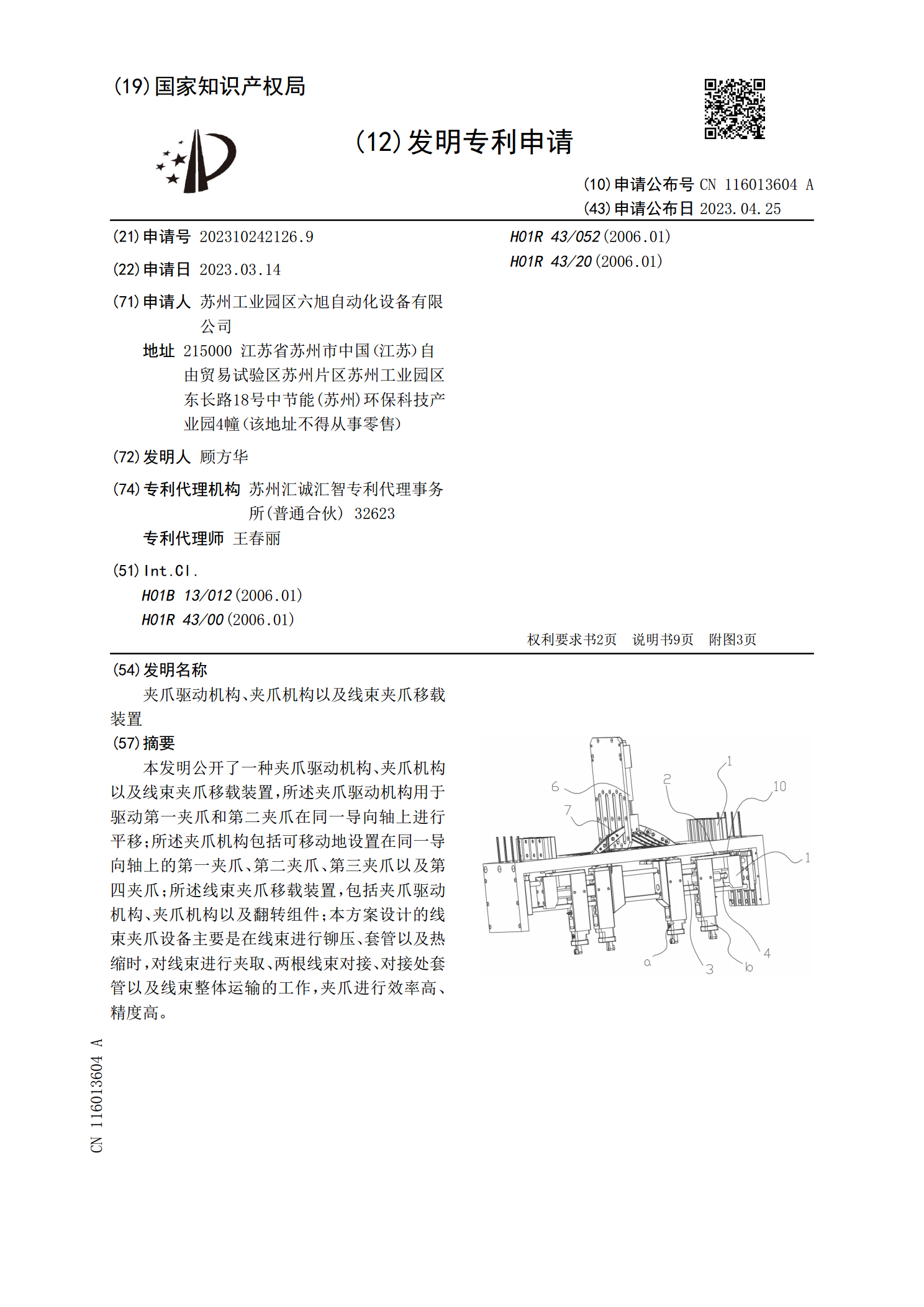
本发明公开了一种夹爪驱动机构、夹爪机构以及线束夹爪移载装置,所述夹爪驱动机构用于驱动第一夹爪和第二夹爪在同一导向轴上进行平移;所述夹爪机构包括可移动地设置在同一导向轴上的第一夹爪、第二夹爪、第三夹爪以及第四夹爪;所述线束夹爪移载装置,包括夹爪驱动机构、夹爪机构以及翻转组件;本方案设计的线束夹爪设备主要是在线束进行铆压、套管以及热缩时,对线束进行夹取、两根线束对接、对接处套管以及线束整体运输的工作,夹爪进行效率高、精度高。

SMC电动夹爪.docx
产品名称:SMC电动夹爪电动滑台,是直线滑台的一种,工业上又常称为电动缸,线性模组等,由直线滑台与马达驱动的结合构成,通过马达驱动实现带动工件自动线性运动。通过多方向轴的组合,组成设备上的运动执行机构,这种机构常被称为:工业机械手、XYZ轴机械手、坐标轴滑台等。电动滑台的主要特点可以从3个主要参数表现出来:精度:不同行业的对电动滑台精度要求不同,所以没有具体对电动滑台精度的规定,可以按照大型机床设备,和中小型机床来对精度进行分级。大型的机床一般精度在1米1丝上下。中小型机床设备对精度要求一般高于0.1mm