
用于自主车辆的跟车距离调节的系统和方法.pdf

书生****文章

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于自主车辆的跟车距离调节的系统和方法.pdf
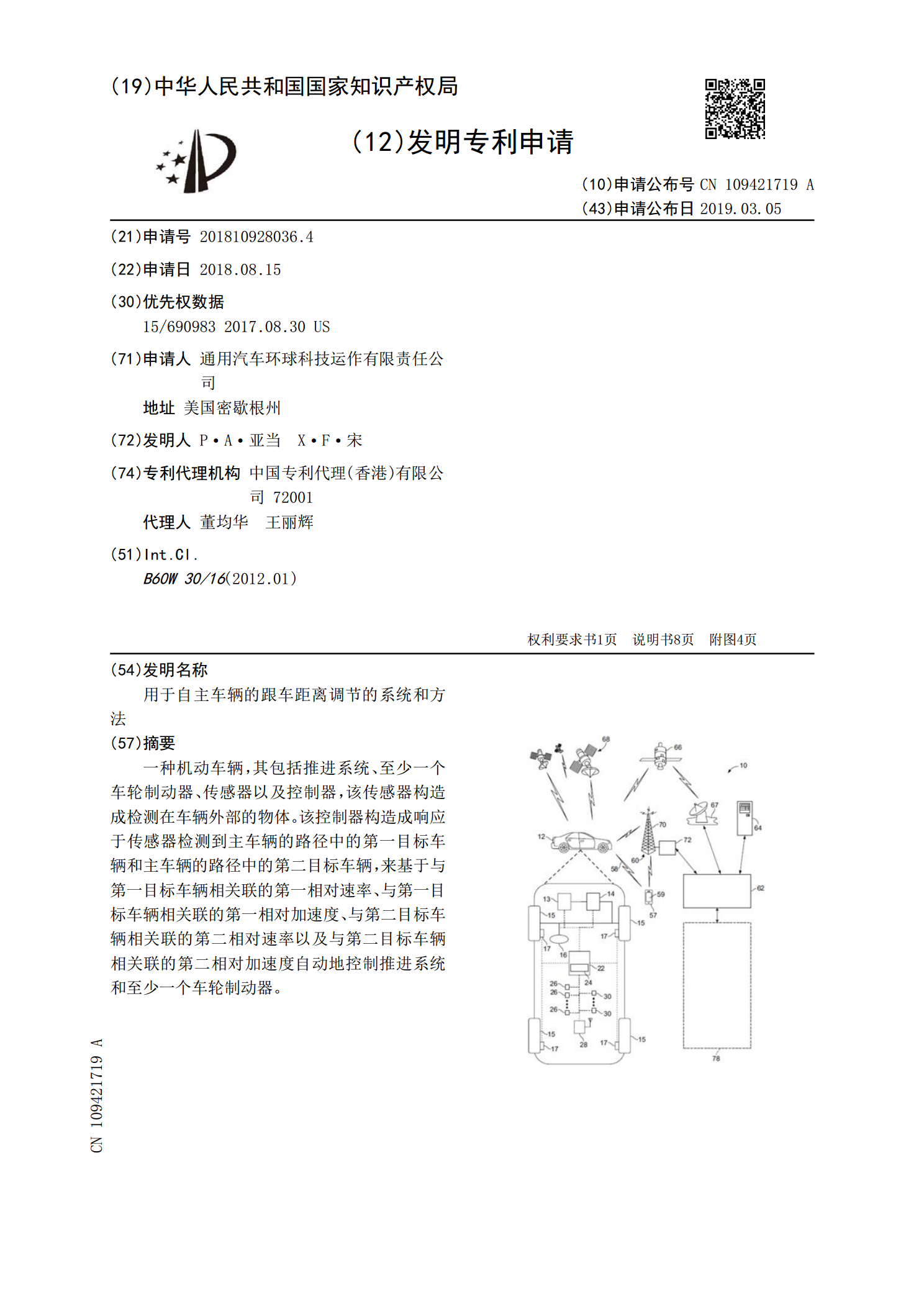
一种机动车辆,其包括推进系统、至少一个车轮制动器、传感器以及控制器,该传感器构造成检测在车辆外部的物体。该控制器构造成响应于传感器检测到主车辆的路径中的第一目标车辆和主车辆的路径中的第二目标车辆,来基于与第一目标车辆相关联的第一相对速率、与第一目标车辆相关联的第一相对加速度、与第二目标车辆相关联的第二相对速率以及与第二目标车辆相关联的第二相对加速度自动地控制推进系统和至少一个车轮制动器。

安全驾驶跟车距离和跟车方法.doc
安全驾驶跟车距离和跟车方法道路交通肇事中,很多是因为驾驶员跟车方法不当,或不能保持合适的跟车距离而造成的。因此,掌握正确的跟车方法,保持合适的跟车距离,对减少事故有重要意义。车辆的跟车驾驶特性表明:在同向行驶的一列汽车中,后车跟随前车运行,驾驶员总不愿意落后很多,总是紧随前车。这是一种“紧随要求”。因此,正确的跟车方法,是既要保证行车安全,又不致影响道路的交通容量。行车实践证明,为保证行车安全,跟车距离不得小于安全间距。驾驶员在跟车过程中,还要注意以下几个方面的问题。(1)跟
用于自主车辆的转向系统和方法.pdf
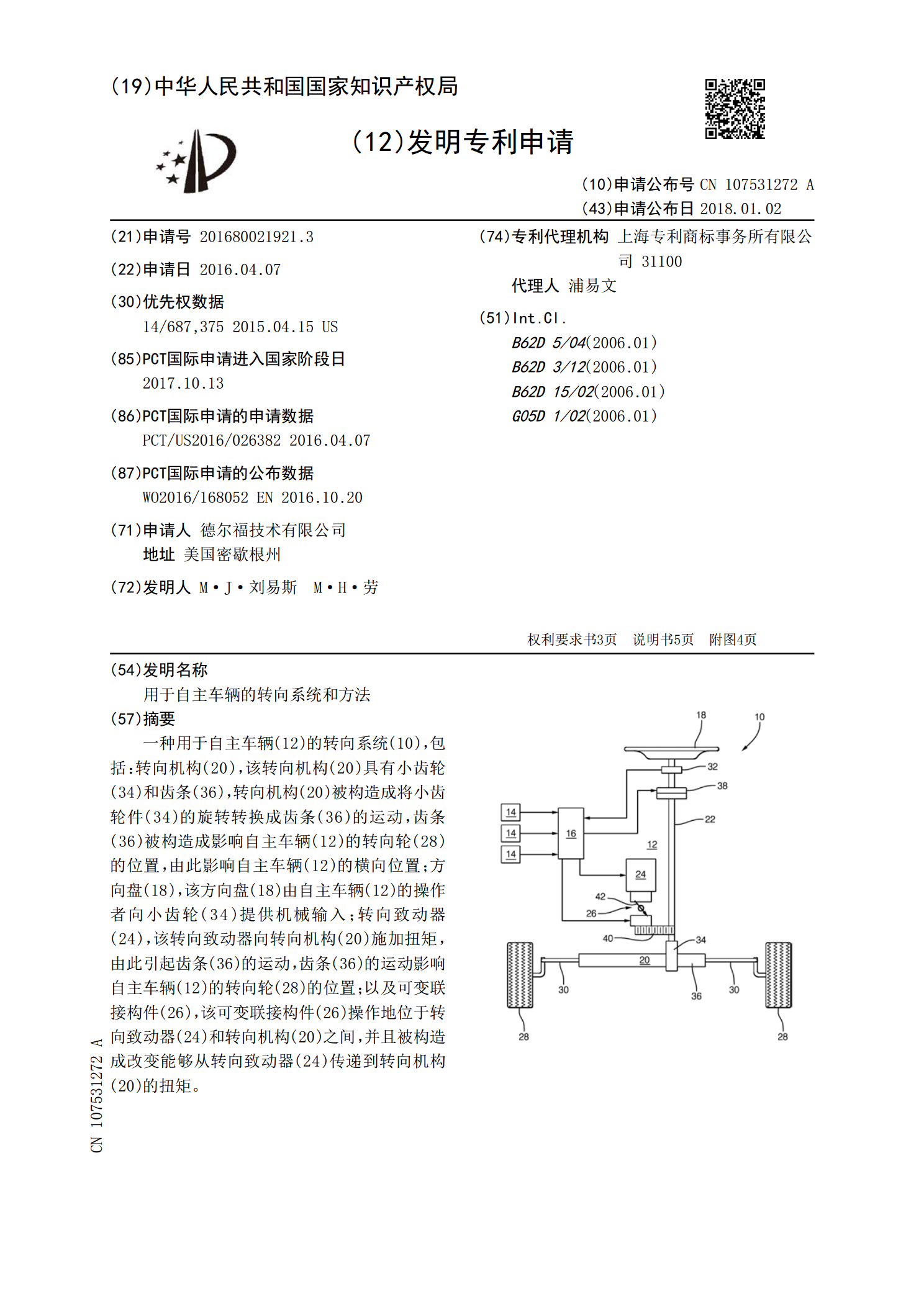
一种用于自主车辆(12)的转向系统(10),包括:转向机构(20),该转向机构(20)具有小齿轮(34)和齿条(36),转向机构(20)被构造成将小齿轮件(34)的旋转转换成齿条(36)的运动,齿条(36)被构造成影响自主车辆(12)的转向轮(28)的位置,由此影响自主车辆(12)的横向位置;方向盘(18),该方向盘(18)由自主车辆(12)的操作者向小齿轮(34)提供机械输入;转向致动器(24),该转向致动器向转向机构(20)施加扭矩,由此引起齿条(36)的运动,齿条(36)的运动影响自主车辆(12)的

用于控制自主车辆的系统和方法.pdf
提供了一种用于控制自主车辆的方法。当所述车辆在命令目的地时,所述方法可以响应于在预定时间段内没有乘客上车/下车。所述预定时间段可以取决于所述车辆是处于到达模式还是出发模式。所述方法可以包括命令所述车辆行驶到被选择为具有大于预定阈值的蜂窝无线信号强度量度的预定位置。

安全驾驶的跟车距离和正确跟车方法.docx
安全驾驶的跟车距离和正确跟车方法道路交通肇事中,很多是因为驾驶员跟车方法不当,或不能保持合适的跟车距离而造成的。因此,掌握正确的跟车方法,保持合适的跟车距离,对减少事故有重要意义。车辆的跟车驾驶特性表明:在同向行驶的一列汽车中,后车跟随前车运行,驾驶员总不愿意落后很多,总是紧随前车。这是一种“紧随要求”。因此,正确的跟车方法,是既要保证行车安全,又不致影响道路的交通容量。行车实践证明,为保证行车安全,跟车距离不得小于安全间距。驾驶员在跟车过程中,还要注意以下几个方面的问题:一、跟车时精力要高度集中,使自己