
用于控制自主车辆的系统和方法.pdf

猫巷****晓容

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于控制自主车辆的系统和方法.pdf
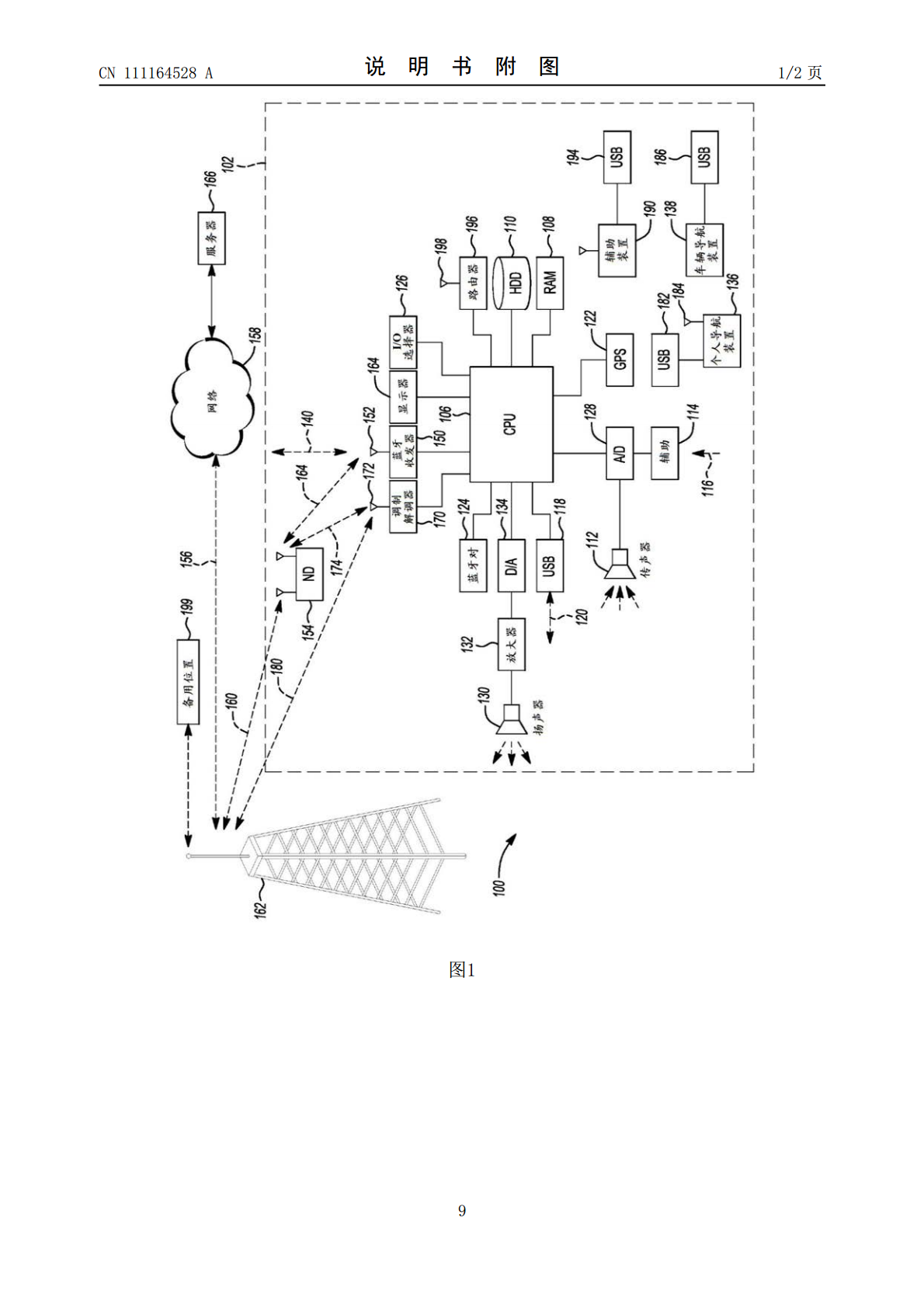
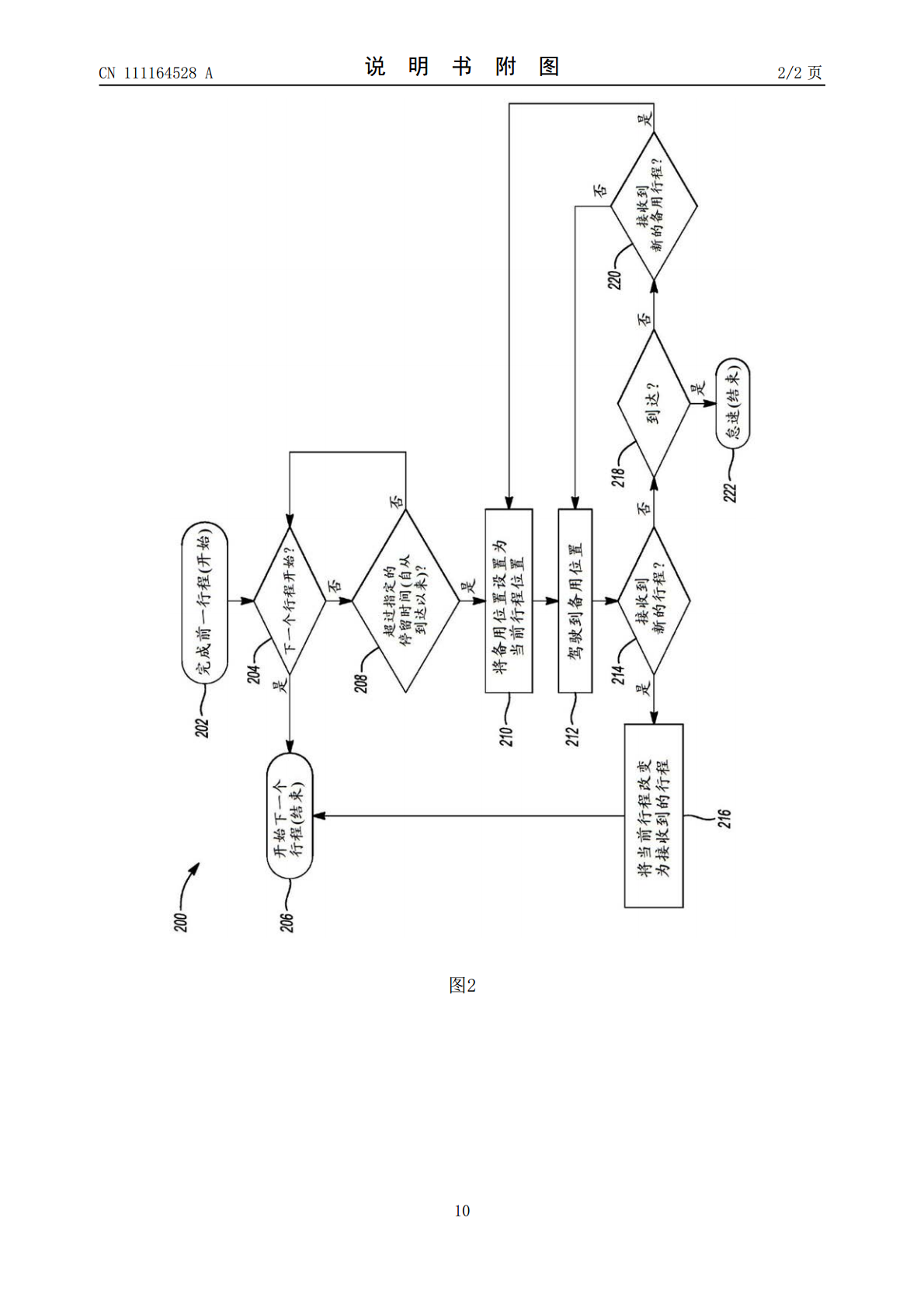
提供了一种用于控制自主车辆的方法。当所述车辆在命令目的地时,所述方法可以响应于在预定时间段内没有乘客上车/下车。所述预定时间段可以取决于所述车辆是处于到达模式还是出发模式。所述方法可以包括命令所述车辆行驶到被选择为具有大于预定阈值的蜂窝无线信号强度量度的预定位置。

用于控制自主施工车辆的系统和方法.pdf
描述了用于在工地上监测和控制多个自主施工车辆的系统和方法。该系统包括位于在工地上工作的移动式施工车辆上的命令和控制站。命令和控制站提供控制自主施工车辆的操作的能力。
用于自主车辆的转向系统和方法.pdf
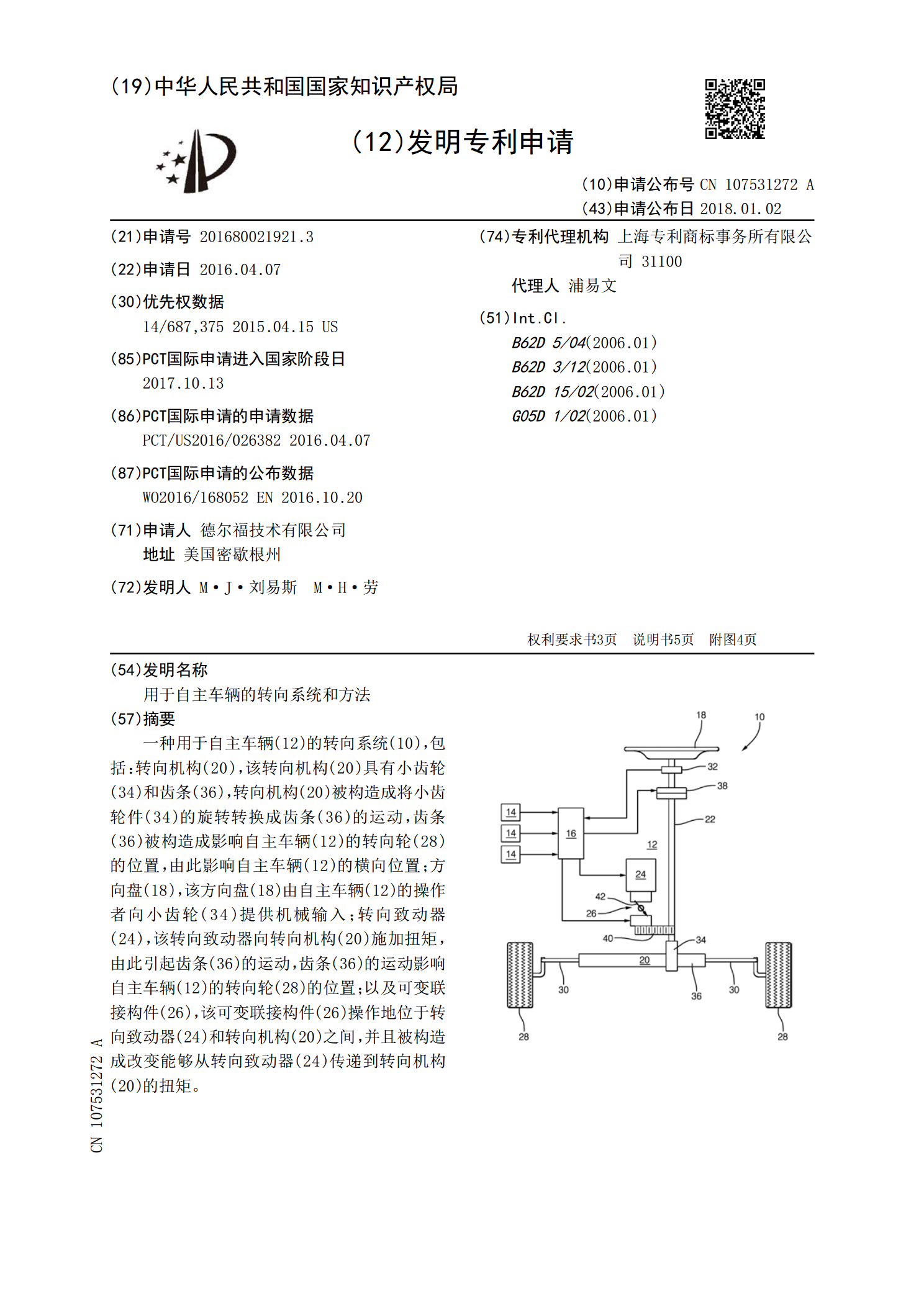
一种用于自主车辆(12)的转向系统(10),包括:转向机构(20),该转向机构(20)具有小齿轮(34)和齿条(36),转向机构(20)被构造成将小齿轮件(34)的旋转转换成齿条(36)的运动,齿条(36)被构造成影响自主车辆(12)的转向轮(28)的位置,由此影响自主车辆(12)的横向位置;方向盘(18),该方向盘(18)由自主车辆(12)的操作者向小齿轮(34)提供机械输入;转向致动器(24),该转向致动器向转向机构(20)施加扭矩,由此引起齿条(36)的运动,齿条(36)的运动影响自主车辆(12)的
用于自主车辆的牵引管理系统和方法.pdf
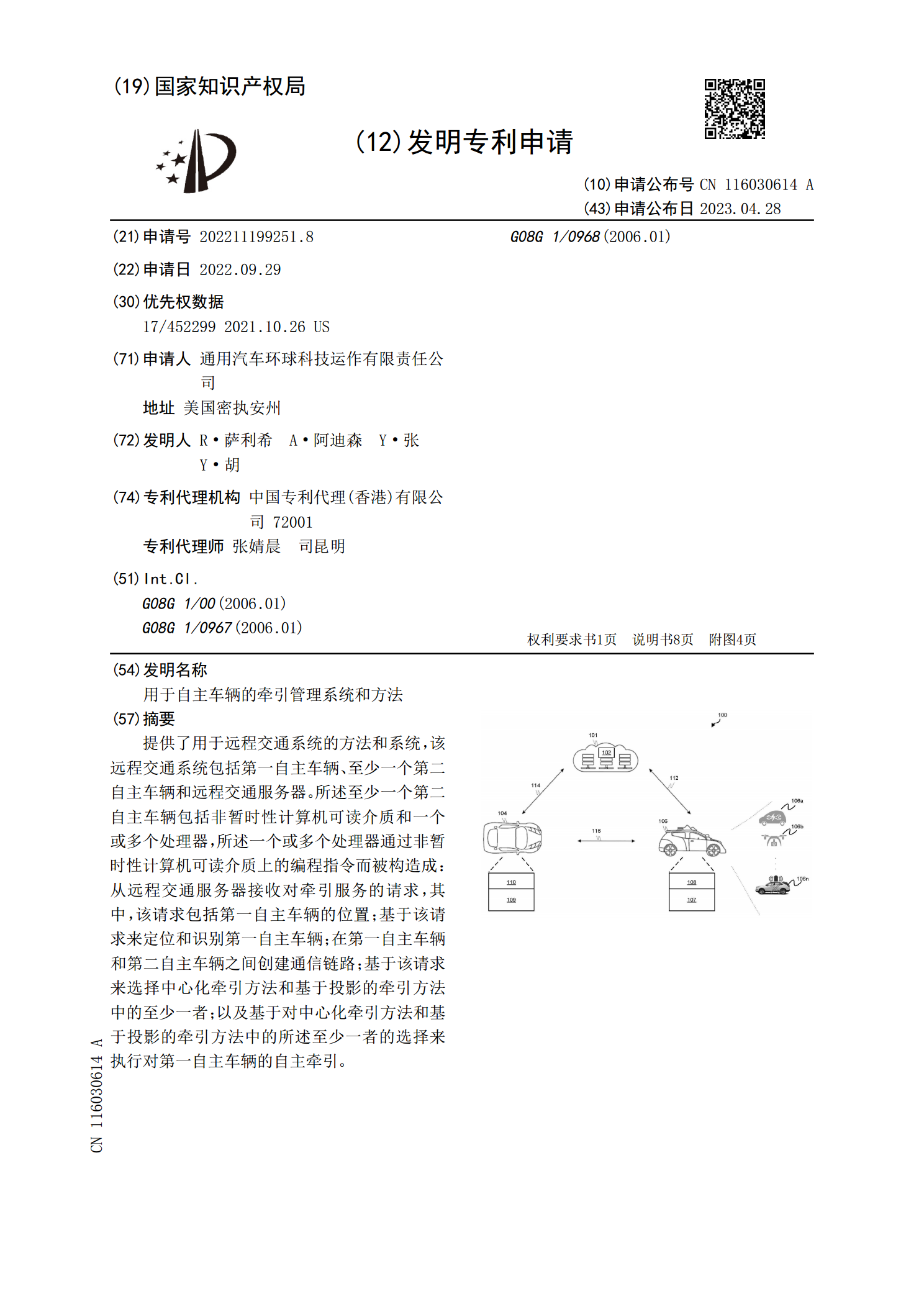
提供了用于远程交通系统的方法和系统,该远程交通系统包括第一自主车辆、至少一个第二自主车辆和远程交通服务器。所述至少一个第二自主车辆包括非暂时性计算机可读介质和一个或多个处理器,所述一个或多个处理器通过非暂时性计算机可读介质上的编程指令而被构造成:从远程交通服务器接收对牵引服务的请求,其中,该请求包括第一自主车辆的位置;基于该请求来定位和识别第一自主车辆;在第一自主车辆和第二自主车辆之间创建通信链路;基于该请求来选择中心化牵引方法和基于投影的牵引方法中的至少一者;以及基于对中心化牵引方法和基于投影的牵引方法

用于控制车辆的方法和系统.pdf
一种对车辆状态和车辆轮胎的刚度状态进行联合估计的方法,车辆状态包括车辆的速度和转首角速度,并且刚度状态包括对车辆的至少一个轮胎与车辆正行驶在的道路的交互作用进行限定的至少一个参数。所述方法使用包括与刚度状态无关的确定性分量和取决于刚度状态的概率性分量的组合的移动模型和测量模型。所述方法利用一组质点来表示刚度状态。各个质点包括刚度状态的均值和方差,所述刚度状态的均值和方差限定刚度状态的参数的可行空间。所述方法使用估计的刚度状态与测量的刚度状态之间的差来迭代地更新至少一些质点的均值和方差,所估计的刚度状态是利