
智能输送车.pdf

文宣****66


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能输送车.pdf
本发明公开了一种智能输送车,包括车体、设于车体上方的载物台、设于车体下方的车轮组件;用于检测载物台荷重的荷重检测器和用于检测路面平整度的路面探测器;路面探测器置于载物台上;荷重检测器包括分设于车体和载物台上的超声波发射器、超声波接收器;荷重检测器和路面探测器分别与PLC控制器连接,PLC控制器根据荷重检测器、路面探测器检测的信号,通过变频电机控制主动轮转速。PLC控制器通过时间继电器分别与荷重检测器、路面探测器信号连接,定时检测获取荷重检测器与路面探测器输出的检测信号。PLC控制器上还设有报警器,载物台荷

智能交通系统的智能设备输送车.pdf
本发明公开了智能交通系统的智能设备输送车,包括主体车板和置物板,主体车板下端四个边角处均设置有万向轮,所述主体车板位于四个所述万向轮的上端均设置有卡紧柱,卡紧柱包括安装在主体车板前端的两个固定卡紧柱和安装在主体车板后端的两个活动卡紧柱,活动卡紧柱和固定卡紧柱沿长度方向均设置有多个均匀分布的卡槽,所述置物板卡紧在四个卡紧柱之间相同平面的卡槽内,所述活动卡紧柱下端与主体车板活动连接,所述主体车板前端通过活动销连接有拉杆。本发明结构简单,搬运方便,且可根据物流件种类、大小或地址日期等信息分开装填搬运,并且置物板

智能交通系统的智能设备安全输送车.pdf
本发明公开了一种智能交通系统的智能设备安全输送车,包括主体车板和置物板,主体车板下端四个边角处均设置万向轮,主体车板位于四个万向轮的上端均设置卡紧柱,卡紧柱包括两个固定卡紧柱和两个活动卡紧柱,活动卡紧柱和固定卡紧柱沿长度方向均设置有卡槽,置物板卡紧在四个卡紧柱之间相同平面的卡槽内,活动卡紧柱下端与主体车板活动连接,主体车板的左、右两端均设置有防护网,防护网下端与主体车板固定连接且防护网上端连接有横杆,卡紧柱上端的外侧面均在同一平面设置有L形卡板,横杆可卡紧在L形卡板内将防护网整体拉伸。本发明通过活动的防护

一种智能物料输送车.pdf
本发明提供的一种智能物料输送车,其通过运行信息采集器采集识别运行轨道和生产线信息,所述逻辑控制电路通过所述运行信息采集器所收集的信号控制该智能物料输送车的启停及运行方向,实现物料的智能输送。该智能物料输送车还设置有一电动千斤顶,该电动千斤顶可驮负一物料架来实现物料的整套配送和快捷搬运;该智能物料输送车通过轨道采集器、停留站采集器及逻辑控制电路实现其自动运行在预定轨道上的功能,同时通过所述障碍信息采集器及左、右偏差控制实现该物料输送车的避障及自动调整运行方向功能,该智能物料输送车不仅提升了物料间与生产线之间
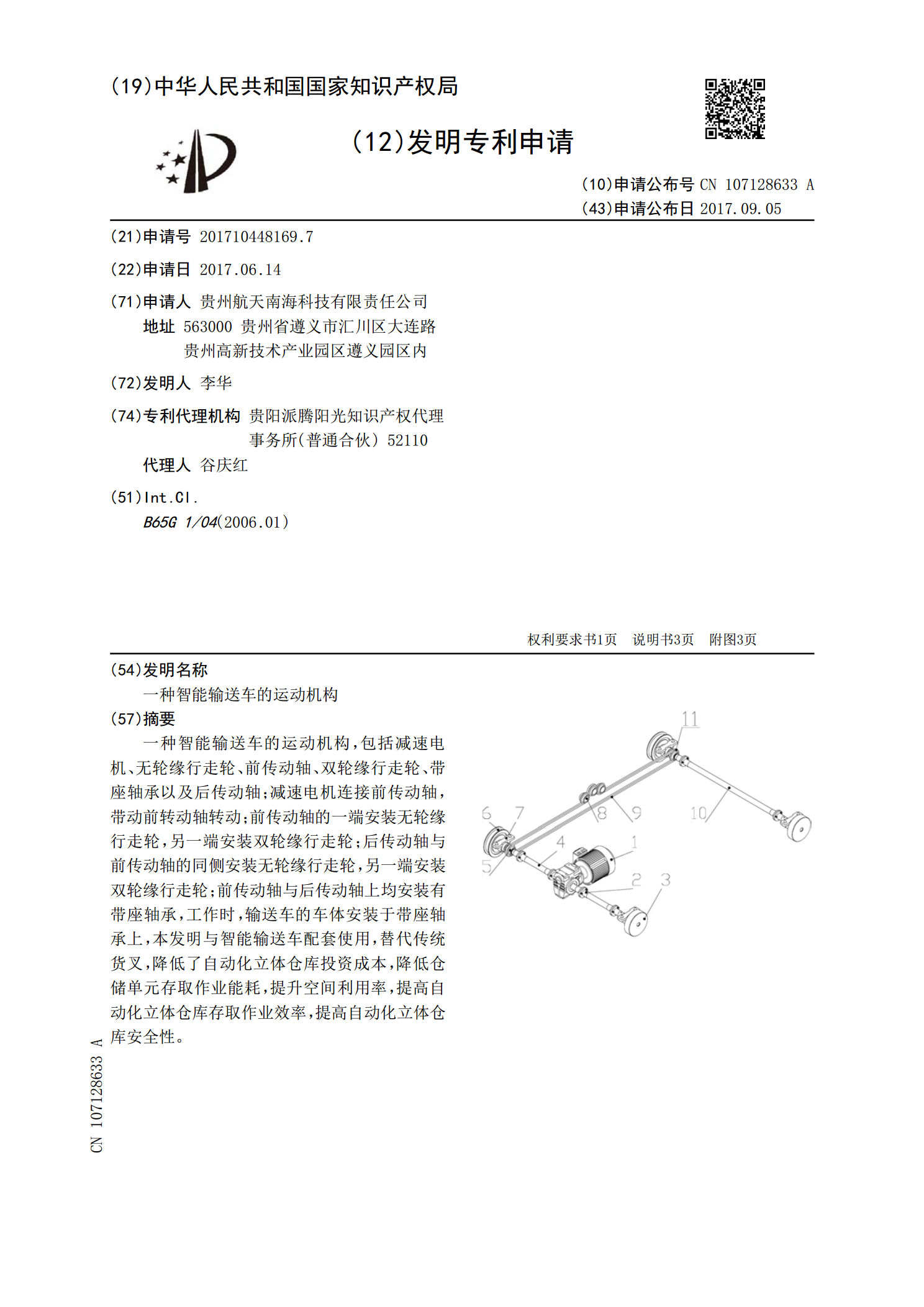
一种智能输送车的运动机构.pdf
一种智能输送车的运动机构,包括减速电机、无轮缘行走轮、前传动轴、双轮缘行走轮、带座轴承以及后传动轴;减速电机连接前传动轴,带动前转动轴转动;前传动轴的一端安装无轮缘行走轮,另一端安装双轮缘行走轮;后传动轴与前传动轴的同侧安装无轮缘行走轮,另一端安装双轮缘行走轮;前传动轴与后传动轴上均安装有带座轴承,工作时,输送车的车体安装于带座轴承上,本发明与智能输送车配套使用,替代传统货叉,降低了自动化立体仓库投资成本,降低仓储单元存取作业能耗,提升空间利用率,提高自动化立体仓库存取作业效率,提高自动化立体仓库安全性。