
襟翼舵转角比可调的齿轮传动装置及其控制方法.pdf

一条****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

襟翼舵转角比可调的齿轮传动装置及其控制方法.pdf
本发明公开了一种襟翼舵转角比可调的齿轮传动装置及其控制方法。本发明所述的齿轮传动装置包括主舵轴、翼舵轴和安装于船舱内部的驱动电机、ECU控制单元、齿轮传动机构及制动系统,驱动电机通过齿轮传动机构可以调整襟翼舵角度,而制动系统则可以使其角度不变。本发明的控制方法是,首先建立船舶航行运动模型,将转船力矩和等效舵角两个目标函数转换成单目标函数,基于人工鱼群算法开发上层控制器和基于backstepping控制理论开发下层控制器,可以实时在线优化襟翼舵角度并进行鲁棒控制。本装置安放在船舱内部,结构简单、紧凑、易于控

转角比无级可调襟翼舵传动装置及其控制方法.pdf
本发明公开一种转角比无级可调襟翼舵传动装置及其控制方法。传动装置包括金属传动带、主动轮组、从动轮组、主动轮液压油缸、从动轮液压油缸、液压泵及液压控制阀及ECU控制单元。通过液压控制阀可以控制主动轮组和从动轮组的等效轮径大小,实现从最小到最大的连续变化,使得安装了主动轮组的主舵轴和安装了从动轮组的翼舵轴转角比可以连续变化。控制器基于退火免疫模糊PID分层控制策略开发,其中上层控制器输出主舵角值和转角比,下层控制器控制液压控制阀和驱动电机,在船舶航行转向时,可以实时在线调节襟翼,使其满足船舶操纵的要求。本发明
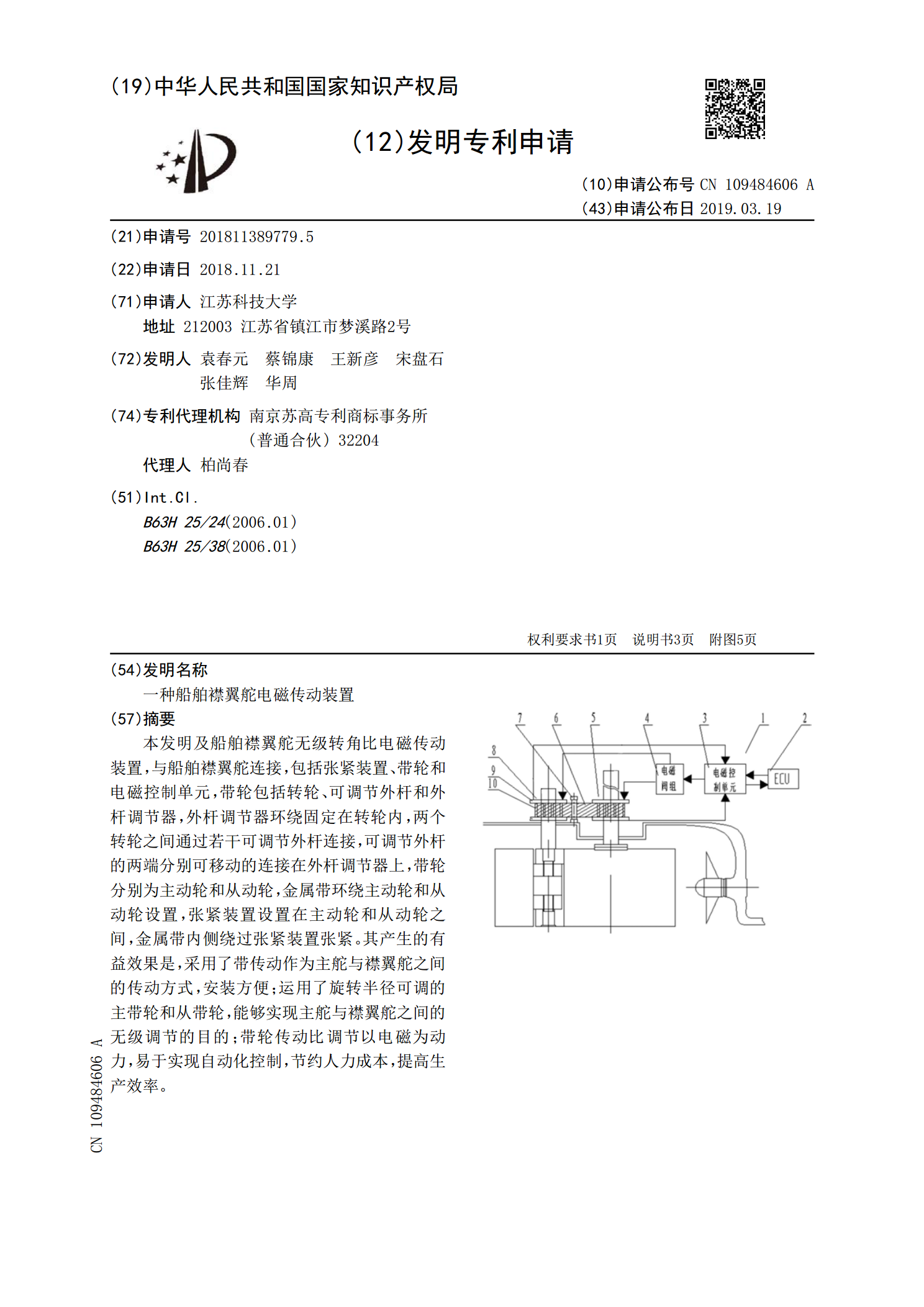
一种船舶襟翼舵电磁传动装置.pdf
本发明及船舶襟翼舵无级转角比电磁传动装置,与船舶襟翼舵连接,包括张紧装置、带轮和电磁控制单元,带轮包括转轮、可调节外杆和外杆调节器,外杆调节器环绕固定在转轮内,两个转轮之间通过若干可调节外杆连接,可调节外杆的两端分别可移动的连接在外杆调节器上,带轮分别为主动轮和从动轮,金属带环绕主动轮和从动轮设置,张紧装置设置在主动轮和从动轮之间,金属带内侧绕过张紧装置张紧。其产生的有益效果是,采用了带传动作为主舵与襟翼舵之间的传动方式,安装方便;运用了旋转半径可调的主带轮和从带轮,能够实现主舵与襟翼舵之间的无级调节的目

船只襟翼舵的铰接装置.pdf
为了提供一种用于船只,尤其是轮船,的襟翼舵(100)的铰接装置(50),其包括:第一轴承座(51),其中设置有滑动活塞(52)和第一轴承(56),尤其是滑动轴承,第二轴承座(53),其中设置有连锁销(54)和可选择的第二轴承(57),尤其是滑动轴承,其具有相对于高负载的提高的安全性和简单结构,第一和第二轴承座(51,53)和/或滑动活塞(52)和连锁销(54)和/或可选择的第一和第二轴承(56,57)中的每一个都具有基本上相同的直径(512,513,533,534,522,542,561,571)和/或基
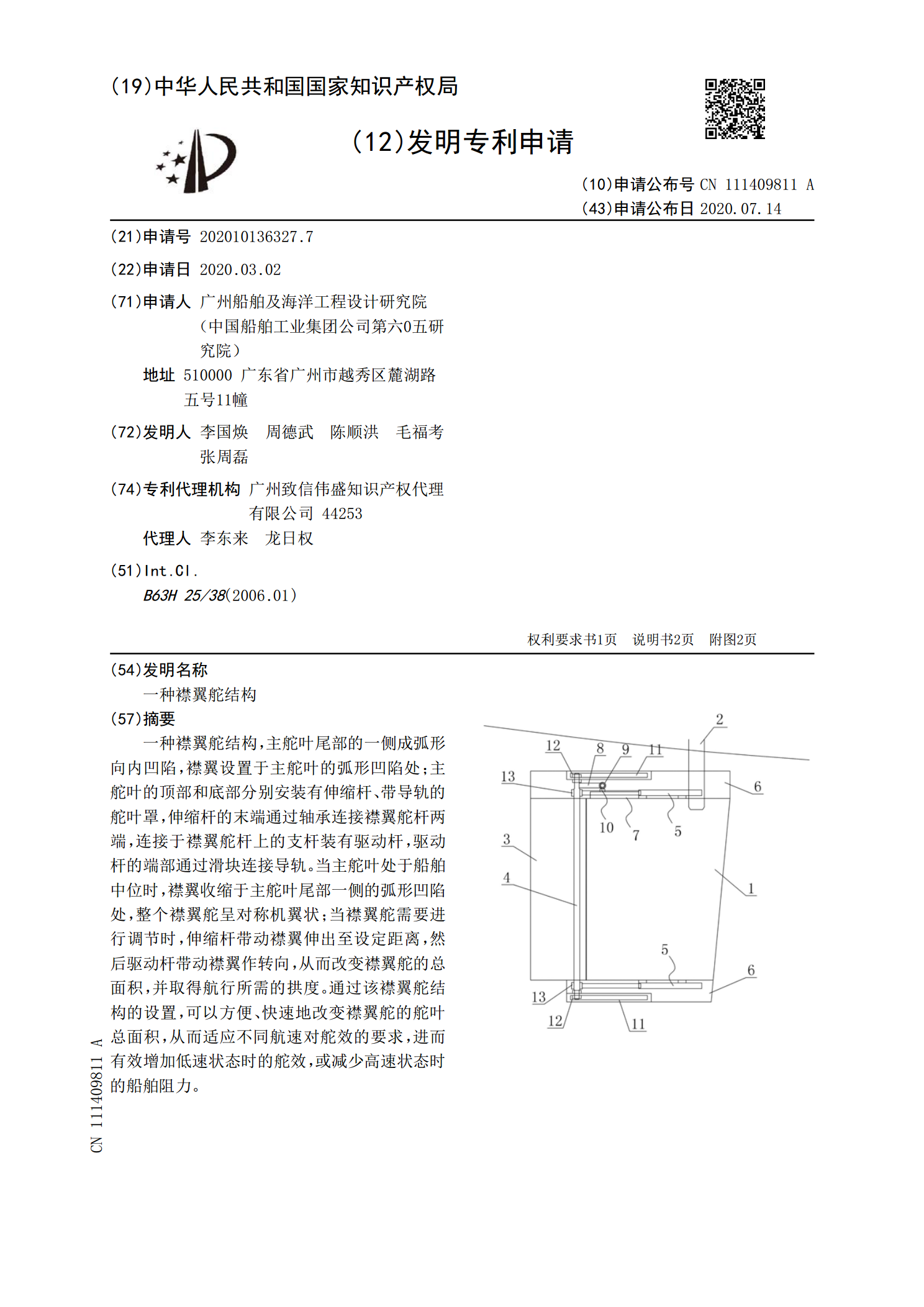
一种襟翼舵结构.pdf
一种襟翼舵结构,主舵叶尾部的一侧成弧形向内凹陷,襟翼设置于主舵叶的弧形凹陷处;主舵叶的顶部和底部分别安装有伸缩杆、带导轨的舵叶罩,伸缩杆的末端通过轴承连接襟翼舵杆两端,连接于襟翼舵杆上的支杆装有驱动杆,驱动杆的端部通过滑块连接导轨。当主舵叶处于船舶中位时,襟翼收缩于主舵叶尾部一侧的弧形凹陷处,整个襟翼舵呈对称机翼状;当襟翼舵需要进行调节时,伸缩杆带动襟翼伸出至设定距离,然后驱动杆带动襟翼作转向,从而改变襟翼舵的总面积,并取得航行所需的拱度。通过该襟翼舵结构的设置,可以方便、快速地改变襟翼舵的舵叶总面积,从