
一种新型全向移动平台.pdf

灵慧****89


1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型全向移动平台.pdf
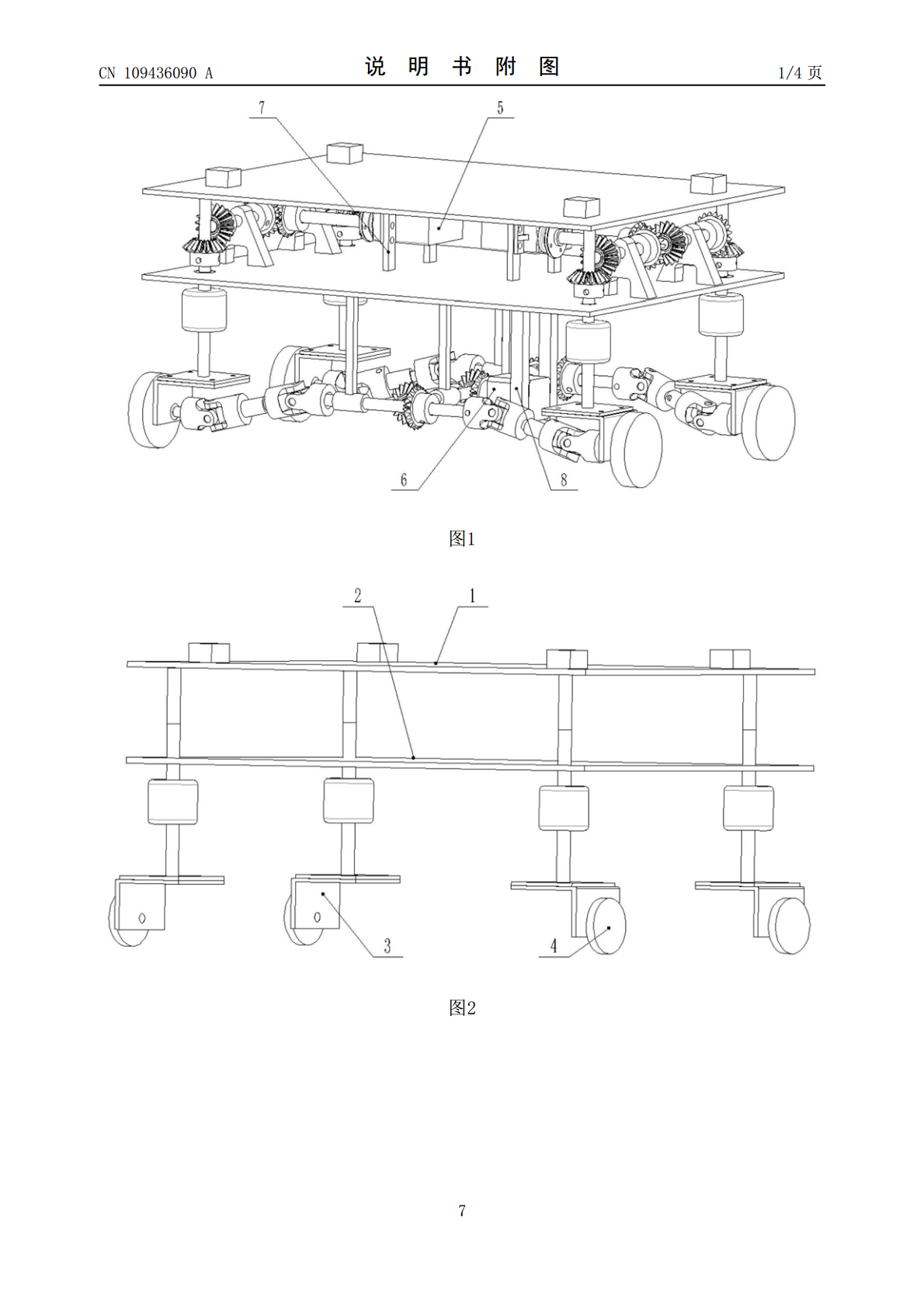
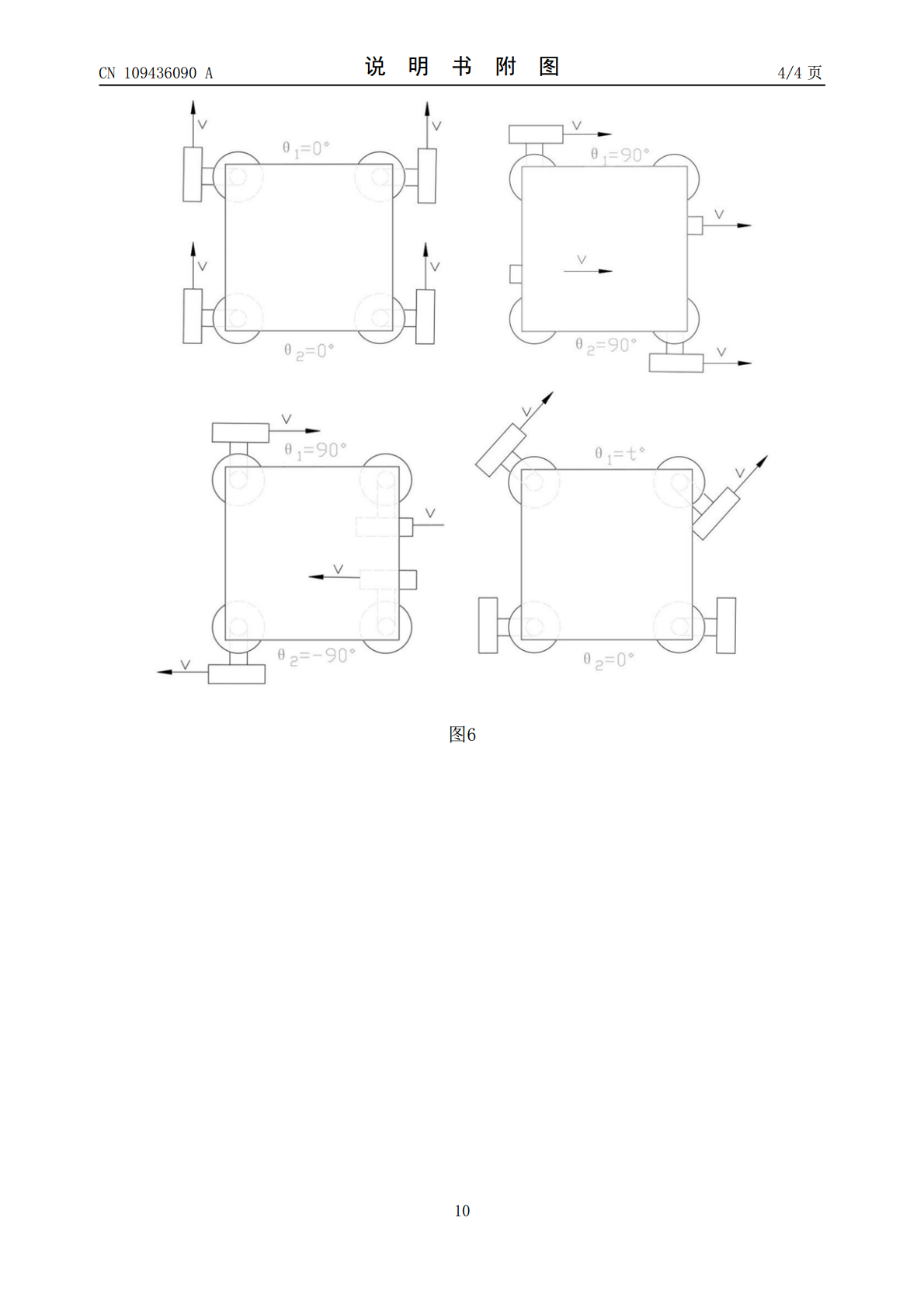
本发明公开了一种新型全向移动平台,属于移动平台、工业自动化领域,包括车轮、万向联轴器、直齿锥齿轮等部件。其中,转向控制机构由步进电机驱动直齿锥齿轮传动装置,将运动等速同步分配至四个轴,实现轴的同步转向功能;运动控制机构由步进电机驱动直齿锥齿轮传动装置和万向联轴器,将运动等速同步分配至四个轮,实现轮的同步驱动功能;万向联轴器连接车轮与直齿锥齿轮输出轴,实现车轮转向和升降时,车轮与直齿锥齿轮输出轴之间的自动匹配功能;运动控制机构、转向控制机构和万向联轴器组合连接能够实现平台的360°全向移动和原地转向;本发明

一种新型全向移动平台.pdf
一种新型全向移动平台,包括:台架本体、编码器永磁同步电机、电池组、单片机控制电路、麦克纳母轮、用于连接麦克纳姆轮与台架本体的支撑轴承座。其特征是:所述麦克纳姆轮数量为六,其均匀分布在台架本体的两侧,安装在台架本体的三条相互平行的轴上;所述麦克纳姆轮中有三个为左旋麦克纳姆轮,有三个为右旋麦克纳姆轮。在六个轮独立驱动时,在摩擦力和驱动力的共同作用下,平台可以实现全方位移动。通过精确控制各个全向移动轮的旋转方向和转速,就可以实现平台在不改变自身姿态的情况下的全方位移动。相较于现有的技术,本发明的新型全向移动平台
一种全向移动平台.pdf
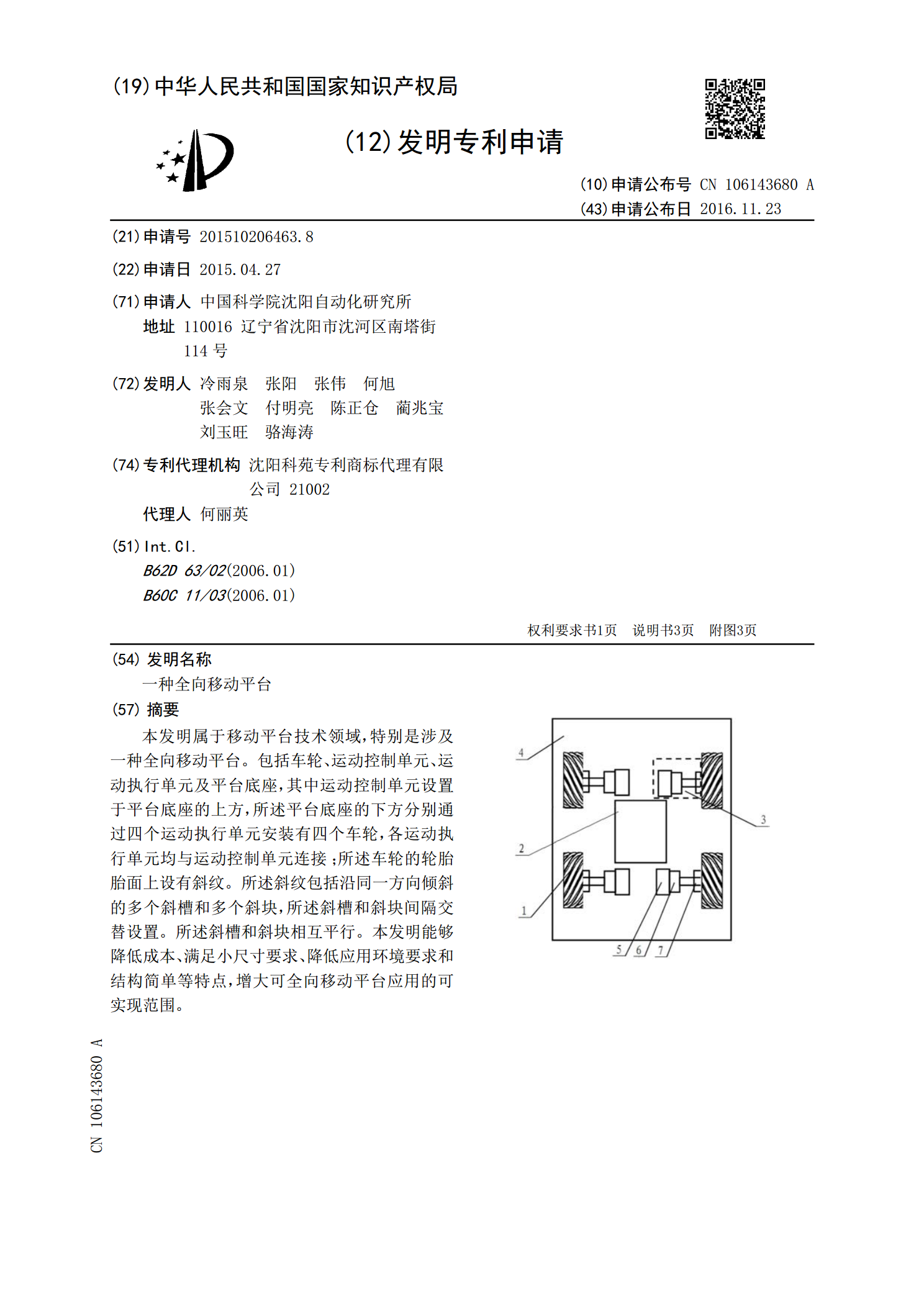
本发明属于移动平台技术领域,特别是涉及一种全向移动平台。包括车轮、运动控制单元、运动执行单元及平台底座,其中运动控制单元设置于平台底座的上方,所述平台底座的下方分别通过四个运动执行单元安装有四个车轮,各运动执行单元均与运动控制单元连接;所述车轮的轮胎胎面上设有斜纹。所述斜纹包括沿同一方向倾斜的多个斜槽和多个斜块,所述斜槽和斜块间隔交替设置。所述斜槽和斜块相互平行。本发明能够降低成本、满足小尺寸要求、降低应用环境要求和结构简单等特点,增大可全向移动平台应用的可实现范围。

一种全向移动平台.pdf
本发明公布了一种全向移动平台,包括台架本体,台架本体呈长方体,在所述台架本体上安装有四个永磁同步电机,永磁同步电机的输出轴连接有减速器,减速器上连接有全向移动轮,每个全向移动轮的转动轴均通过支撑轴承座固定在台架本体上,在所述台架本体上还安装有电池组,电池组与永磁同步电机连接,在所述台架本体上还安装有电机控制器。本发明通过控制每台永磁同步电机的旋转方向和转速,可以实现平面内的任意移动轨迹,具有很高的灵活性,位置可达性较好,使用场合不受限制,可以在空间狭小、复杂的环境下使用,工作空间要求大大降低,基本可以满足
一种全向移动平台.pdf
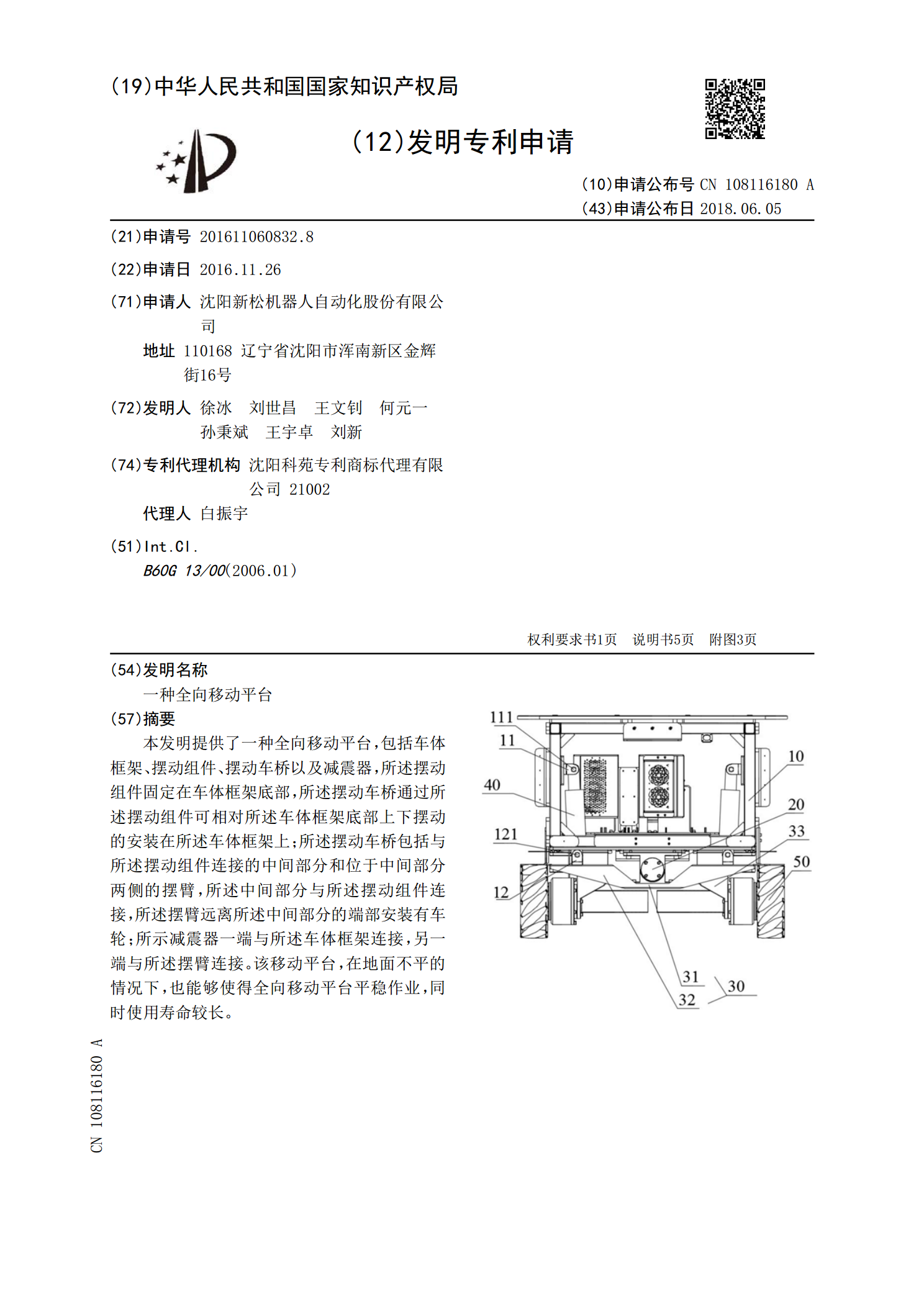
本发明提供了一种全向移动平台,包括车体框架、摆动组件、摆动车桥以及减震器,所述摆动组件固定在车体框架底部,所述摆动车桥通过所述摆动组件可相对所述车体框架底部上下摆动的安装在所述车体框架上;所述摆动车桥包括与所述摆动组件连接的中间部分和位于中间部分两侧的摆臂,所述中间部分与所述摆动组件连接,所述摆臂远离所述中间部分的端部安装有车轮;所示减震器一端与所述车体框架连接,另一端与所述摆臂连接。该移动平台,在地面不平的情况下,也能够使得全向移动平台平稳作业,同时使用寿命较长。