
一种多自由度软体手指康复机器人.pdf

书生****12


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多自由度软体手指康复机器人.pdf
本发明提供了一种多自由度软体手指康复机器人,包括柔性外骨骼手套、柔性角度传感器、鲍登线和驱动模块;柔性角度传感器分布在柔性外骨骼手套上,驱动模块包括单片机和多组电机驱动,每组电机驱动均由直流电机、蜗轮蜗杆以及电机控制柜构成,柔性外骨骼手套采用的是三指结构,电机驱动安装在柔性外骨骼手套三指的靠近掌指关节的掌骨处和靠近第二关节的近节指骨处;鲍登线将电机驱动与柔性外骨骼手套的关节端或指尖端连接,鲍登线可牵引手套手指的第二指关节和掌指关节运动。本发明可单独控制手指的第二指关节和掌指关节,可控制6个自由度,兼具舒适

多自由度拇指辅助的软体康复外骨骼机器人.pdf
本发明涉及医用康复训练和助力设备,具体地说是一种多自由度拇指辅助的软体康复外骨骼机器人,包括软体外骨骼手套、肌腱拉力线、柔性连杆、驱动装置及控制系统,肌腱拉力线一端连接直线驱动器,另一端连接软体外骨骼手套用以驱动拇指的外展/内收和弯曲/伸展两个自由度;柔性连杆一端与拇指指套铰接,另一端与手背结构件铰接,并通过肌腱拉力线的收缩沿着滑动槽移动,从而驱动拇指的内收和外展运动;肌腱拉力线连接拇指背侧驱动拇指的伸展运动,另一根拉力线连接拇指掌侧驱动拇指的弯曲运动。本发明可以有效地助力中风患者的拇指运动,以完成所需的

一种可穿戴式多自由度手指手腕康复装置.pdf
本发明提供一种可穿戴式手指手腕康复装置,该康复装置包括:手指康复训练部分、手腕康复训练部分、支撑架、固定座、动力及传动部分、可携带电源背包。本发明所述的康复装置由两种工作模式:手腕康复模式和手指康复模式,患者通过支撑架支撑并固定住小臂,手指和手腕分别套入手指康复训练部分和手腕康复训练部分,两者可以单独工作或者配合工作;手指康复训练部分设置有三个步进电机,通过齿轮传动分别控制大拇指、食指和其余三只的康复训练;手腕康复训练部分设置异形并联机构。本发明结构独特新颖,实用合理,不易脱落,实现功能多样化,可进行手指
一种多自由度的下肢康复机器人.pdf
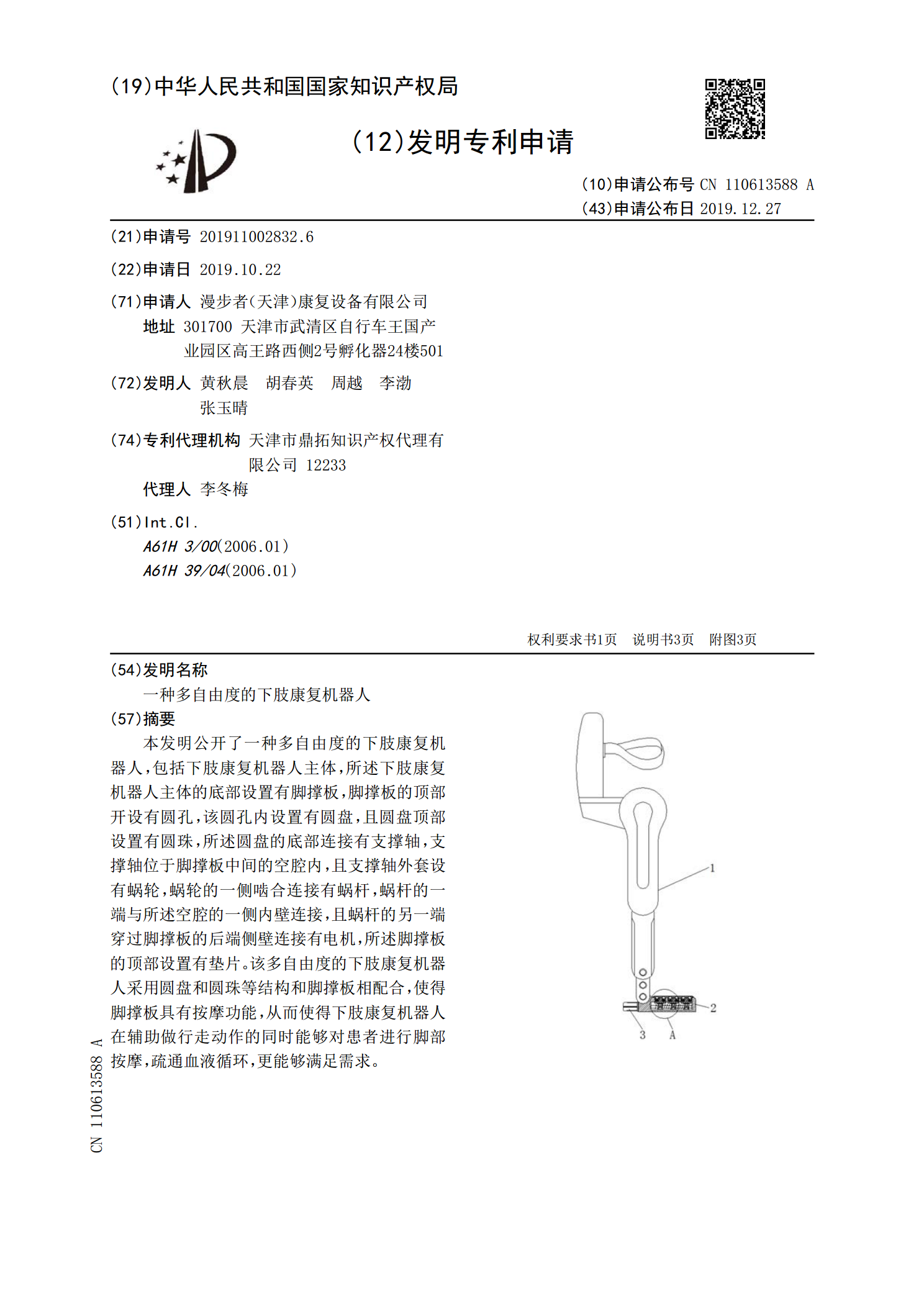
本发明公开了一种多自由度的下肢康复机器人,包括下肢康复机器人主体,所述下肢康复机器人主体的底部设置有脚撑板,脚撑板的顶部开设有圆孔,该圆孔内设置有圆盘,且圆盘顶部设置有圆珠,所述圆盘的底部连接有支撑轴,支撑轴位于脚撑板中间的空腔内,且支撑轴外套设有蜗轮,蜗轮的一侧啮合连接有蜗杆,蜗杆的一端与所述空腔的一侧内壁连接,且蜗杆的另一端穿过脚撑板的后端侧壁连接有电机,所述脚撑板的顶部设置有垫片。该多自由度的下肢康复机器人采用圆盘和圆珠等结构和脚撑板相配合,使得脚撑板具有按摩功能,从而使得下肢康复机器人在辅助做行走

一种康复机器人的多自由度控制手臂.pdf
本发明涉及保健设备领域,尤其涉及一种康复机器人的多自由度控制手臂。为了解决在对病人的手臂开展各项训练项目中,不能有效的主动对病人的身体姿态进行引导,易导致病人的身体产生损伤的技术问题。本发明提供了这样一种康复机器人的多自由度控制手臂,包括有弧度调控单元和U型架等。本康复机器人以多种自由度对病人的手臂进行单向或多项锻炼项目,另外由转向调控单元通过拉绳控制弧度调控单元对橡胶垫的形状进行调控,实现在对病人的手臂开展单向或多项训练项目中,对病人的手臂进行牵引锻炼同时,有效的主动对病人的身体姿态进行引导,使病人的身