
一种自主行走轮式移动机器人控制器.pdf

Ke****67

1/5
2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自主行走轮式移动机器人控制器.pdf
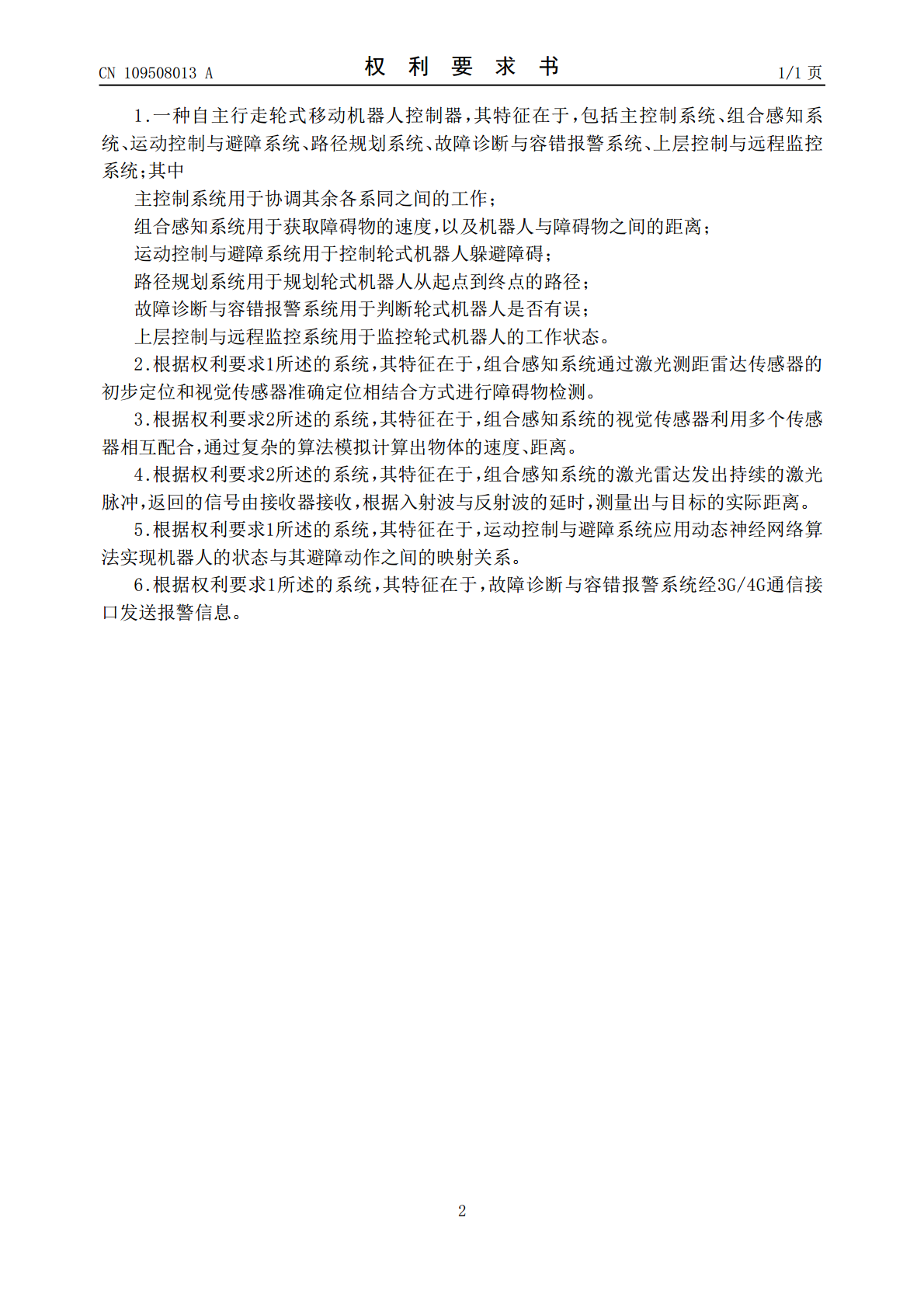
本发明提供了一种自主行走轮式移动机器人控制器,包括主控制系统、组合感知系统、运动控制与避障系统、路径规划系统、故障诊断与容错报警系统、上层控制与远程监控系统;主控制系统用于协调其余各系同之间的工作;组合感知系统用于获取障碍物的速度,以及机器人与障碍物之间的距离;运动控制与避障系统用于控制轮式机器人躲避障碍;路径规划系统用于规划轮式机器人从起点到终点的路径;故障诊断与容错报警系统用于判断轮式机器人是否有误;上层控制与远程监控系统用于监控轮式机器人的工作状态。
一种轮式自主移动机器人.pdf
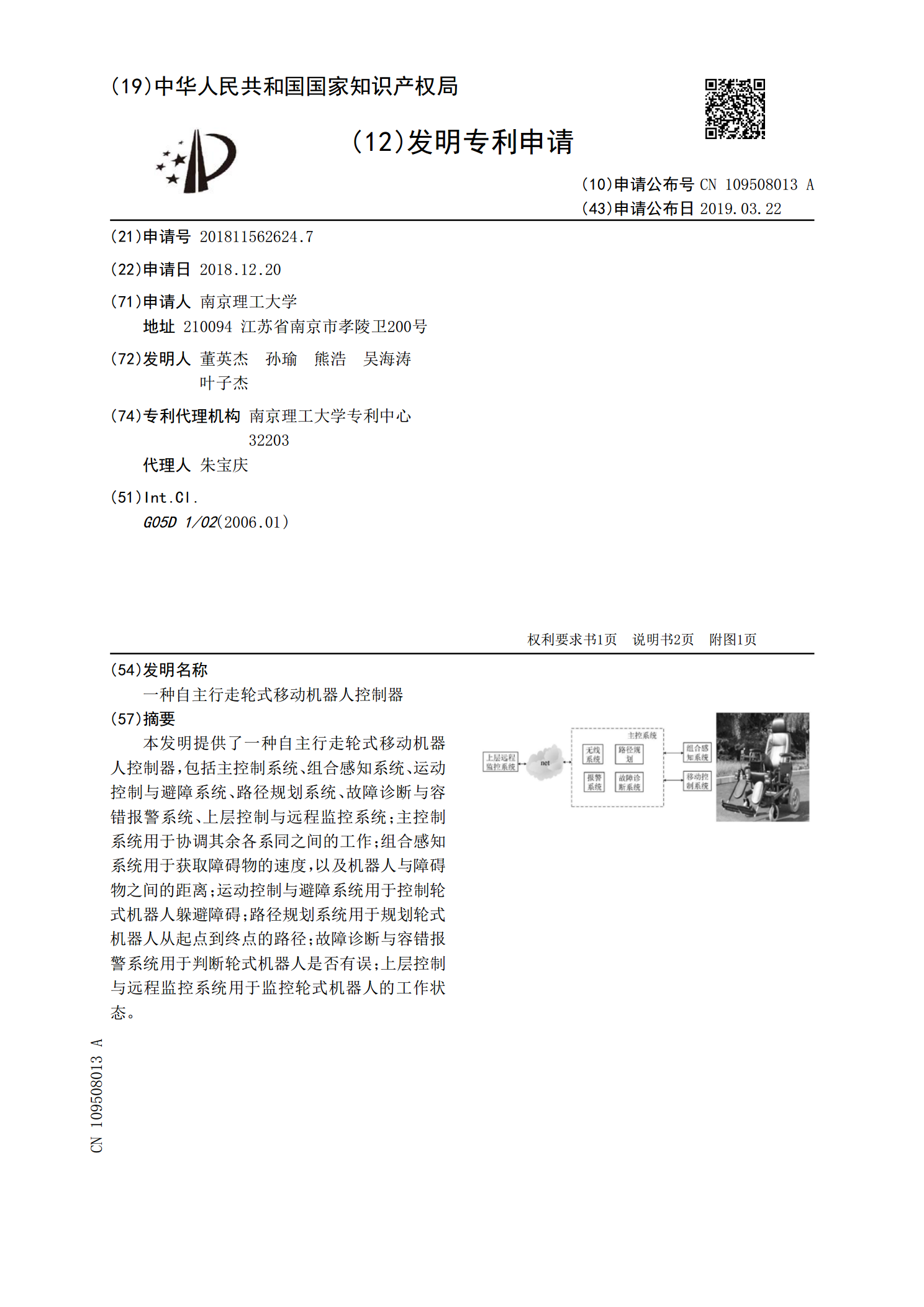
本发明涉及机器人技术领域,尤其是一种轮式自主移动机器人。它包括机体承重总成、设置于机体承重总成的底部的驱动轮体总成和装设于机体承重总成上的自动控制总成;自动控制总成包括对地测距传感器阵列组、前向避障传感器阵列组、前向测距传感器阵列组、激光雷达检测装置、机体惯性测量模块、驱动轮角度读取模块、上位机控制器和下位机控制器,上位机控制器将接收到的所有数据作融合后绘制出实时的环境地图以及对机体承重总成作实时定位以及规划行进路径,上位机控制器根据规划的行进路径通过下位机控制器控制驱动轮体总成动作。本发明可自动感知未知

一种轮式行走底盘.pdf
一种轮式行走底盘,由机架、传动机构、制动机构、驱动轮组成,机架每侧设三个以上驱动车轮,左右两侧驱动轮独立传动,采用偏心轮边减速结构,将底盘的机架设为三段,中间段与机体固定连接,前后两段分别与中间段铰接,并用减振元件支撑,前轮采用折腰或偏转方式转向,增强了轮式行走底盘的通过性与灵活性。
一种轮式行走装置.pdf
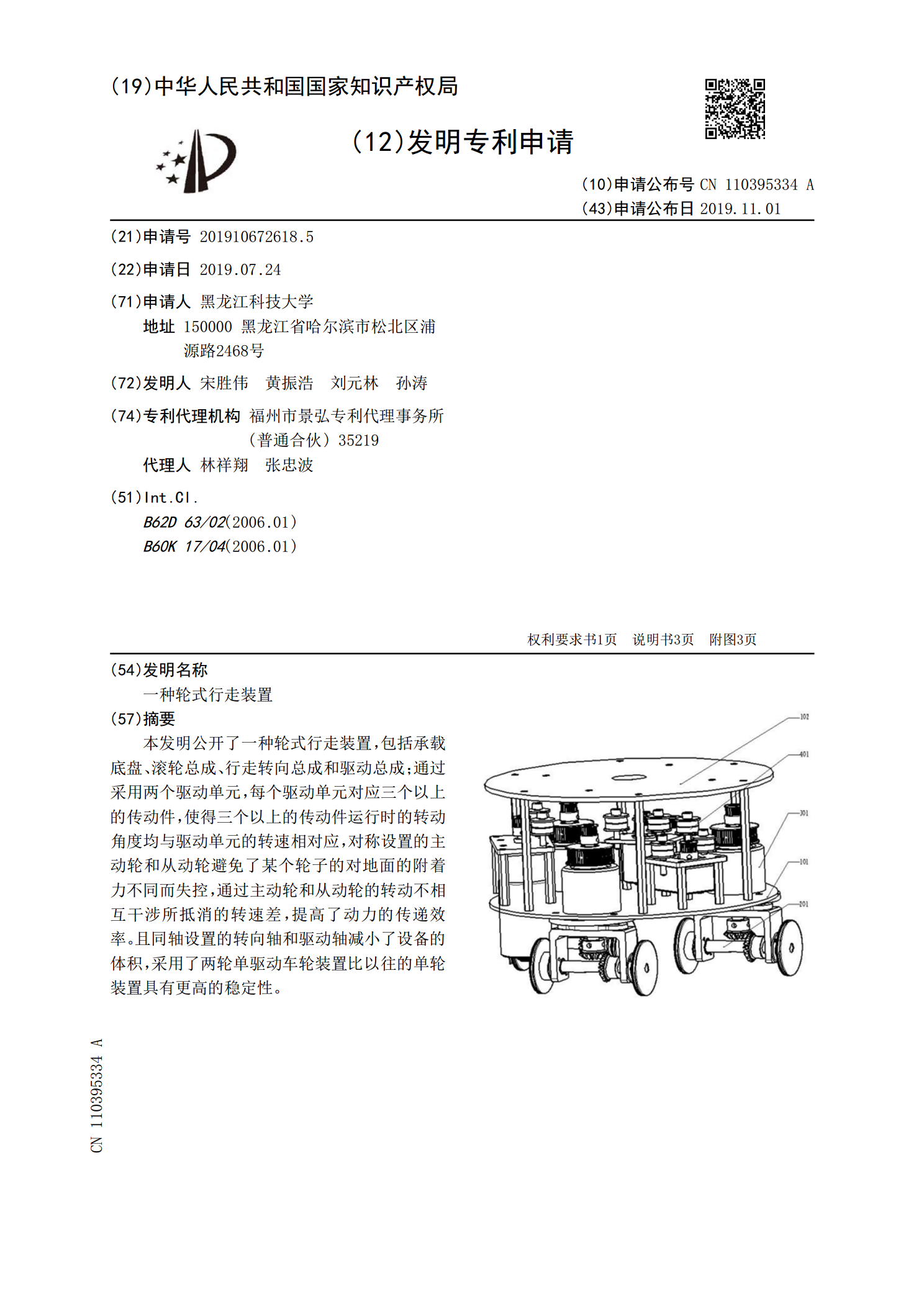
本发明公开了一种轮式行走装置,包括承载底盘、滚轮总成、行走转向总成和驱动总成;通过采用两个驱动单元,每个驱动单元对应三个以上的传动件,使得三个以上的传动件运行时的转动角度均与驱动单元的转速相对应,对称设置的主动轮和从动轮避免了某个轮子的对地面的附着力不同而失控,通过主动轮和从动轮的转动不相互干涉所抵消的转速差,提高了动力的传递效率。且同轴设置的转向轴和驱动轴减小了设备的体积,采用了两轮单驱动车轮装置比以往的单轮装置具有更高的稳定性。
一种齿轮式行走装置.pdf
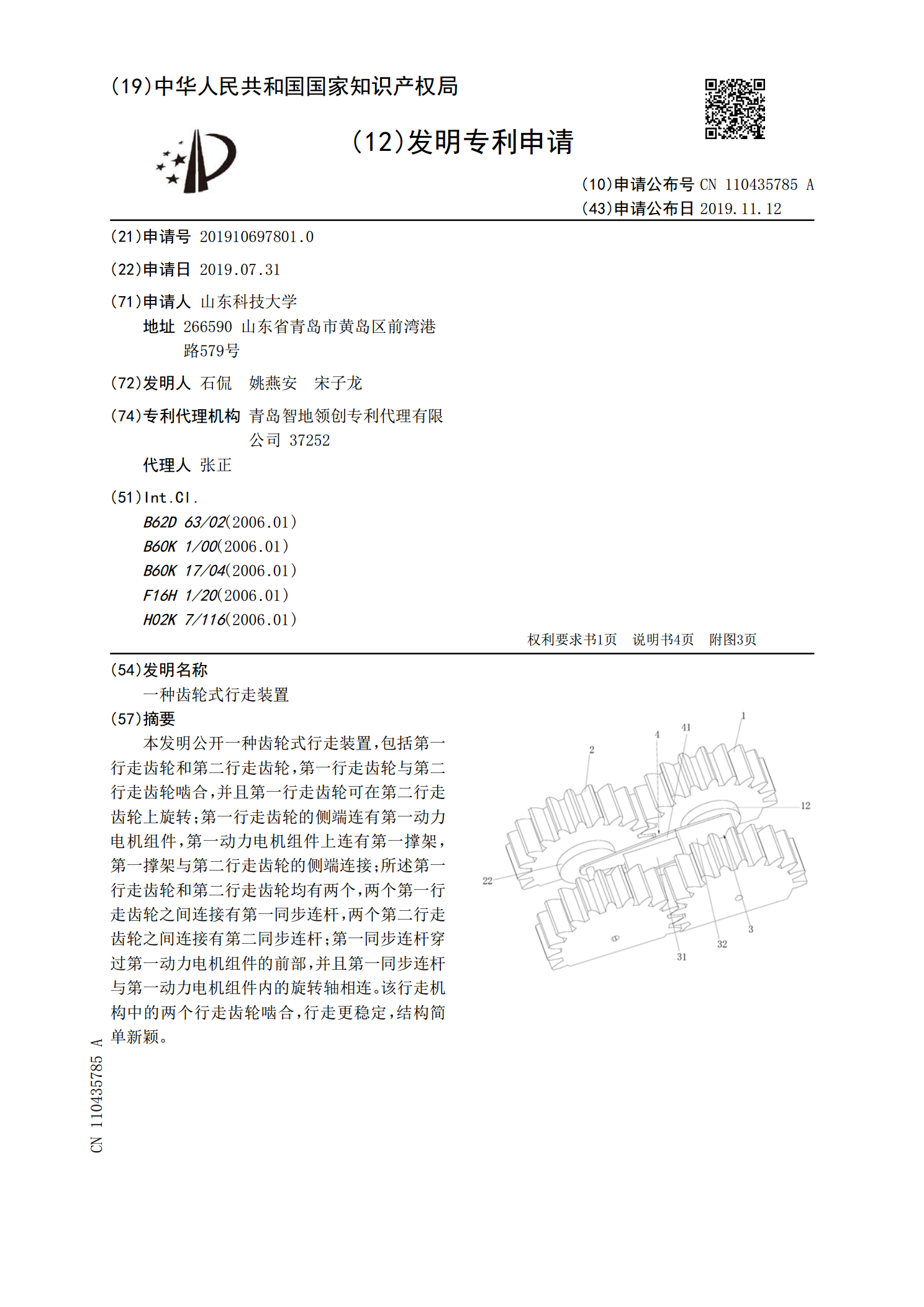
本发明公开一种齿轮式行走装置,包括第一行走齿轮和第二行走齿轮,第一行走齿轮与第二行走齿轮啮合,并且第一行走齿轮可在第二行走齿轮上旋转;第一行走齿轮的侧端连有第一动力电机组件,第一动力电机组件上连有第一撑架,第一撑架与第二行走齿轮的侧端连接;所述第一行走齿轮和第二行走齿轮均有两个,两个第一行走齿轮之间连接有第一同步连杆,两个第二行走齿轮之间连接有第二同步连杆;第一同步连杆穿过第一动力电机组件的前部,并且第一同步连杆与第一动力电机组件内的旋转轴相连。该行走机构中的两个行走齿轮啮合,行走更稳定,结构简单新颖。