
一种消防救援特种六足机器人.pdf

St****36

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种消防救援特种六足机器人.pdf
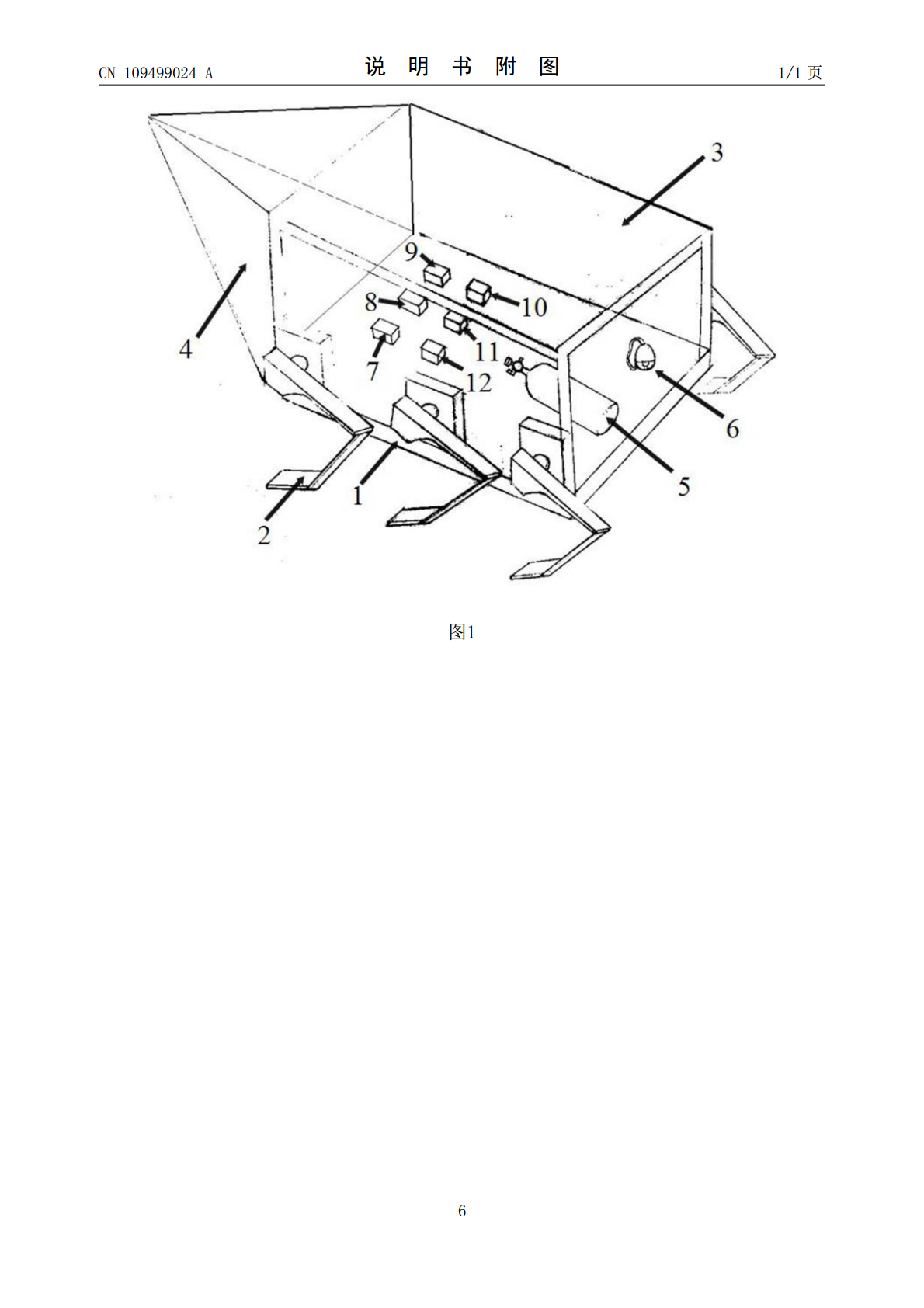
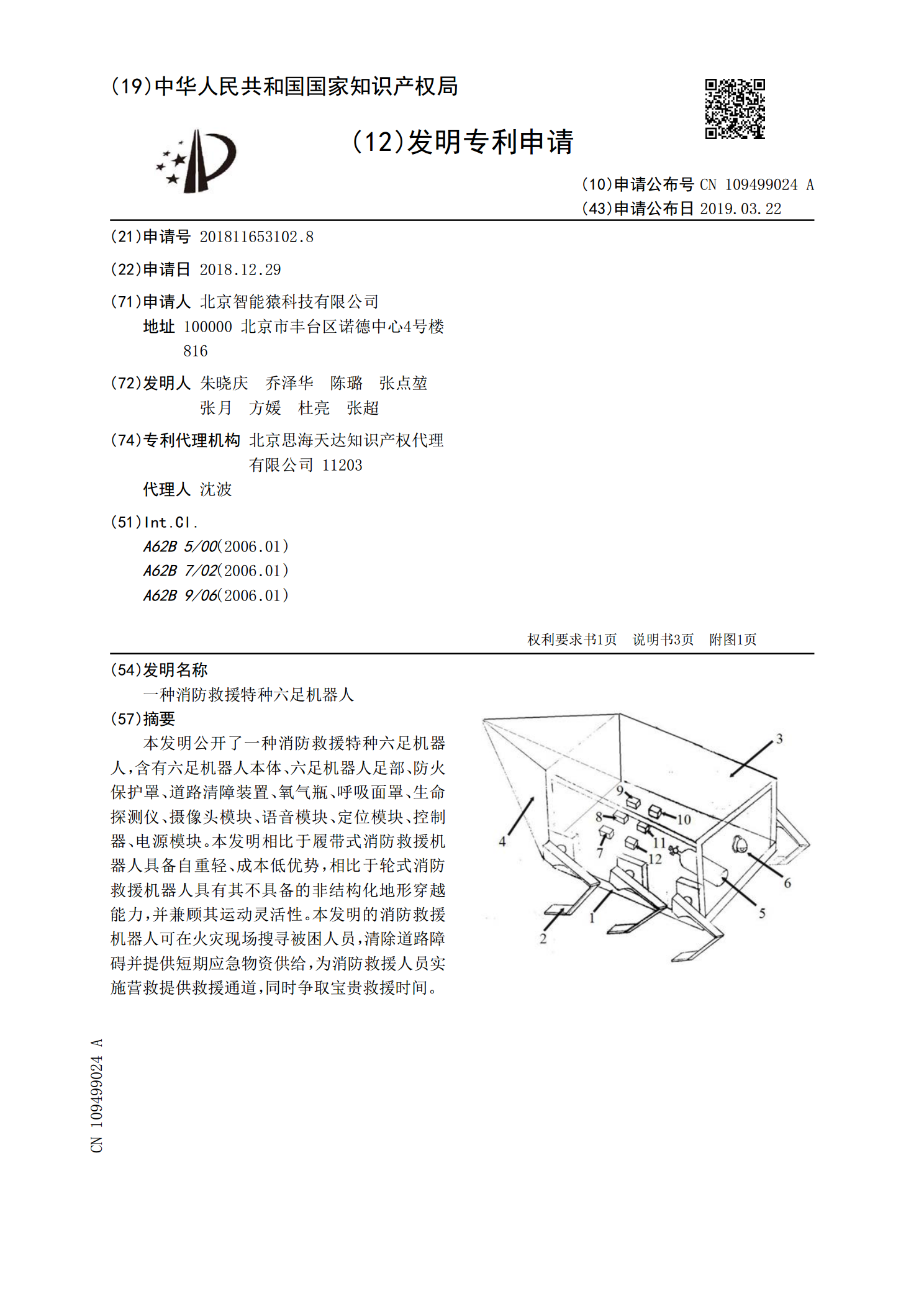
本发明公开了一种消防救援特种六足机器人,含有六足机器人本体、六足机器人足部、防火保护罩、道路清障装置、氧气瓶、呼吸面罩、生命探测仪、摄像头模块、语音模块、定位模块、控制器、电源模块。本发明相比于履带式消防救援机器人具备自重轻、成本低优势,相比于轮式消防救援机器人具有其不具备的非结构化地形穿越能力,并兼顾其运动灵活性。本发明的消防救援机器人可在火灾现场搜寻被困人员,清除道路障碍并提供短期应急物资供给,为消防救援人员实施营救提供救援通道,同时争取宝贵救援时间。
六足地震救援机器人.pdf
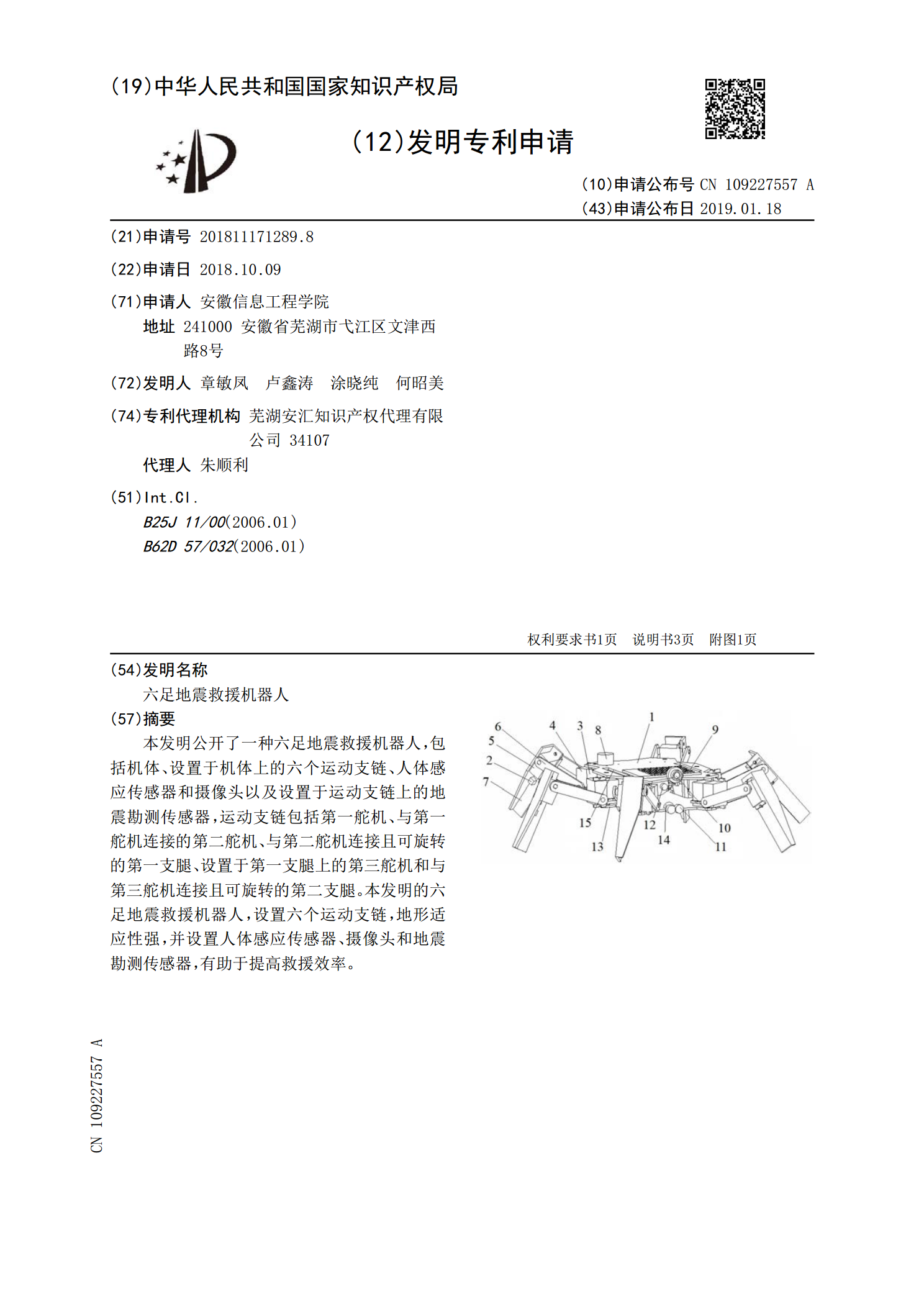
本发明公开了一种六足地震救援机器人,包括机体、设置于机体上的六个运动支链、人体感应传感器和摄像头以及设置于运动支链上的地震勘测传感器,运动支链包括第一舵机、与第一舵机连接的第二舵机、与第二舵机连接且可旋转的第一支腿、设置于第一支腿上的第三舵机和与第三舵机连接且可旋转的第二支腿。本发明的六足地震救援机器人,设置六个运动支链,地形适应性强,并设置人体感应传感器、摄像头和地震勘测传感器,有助于提高救援效率。
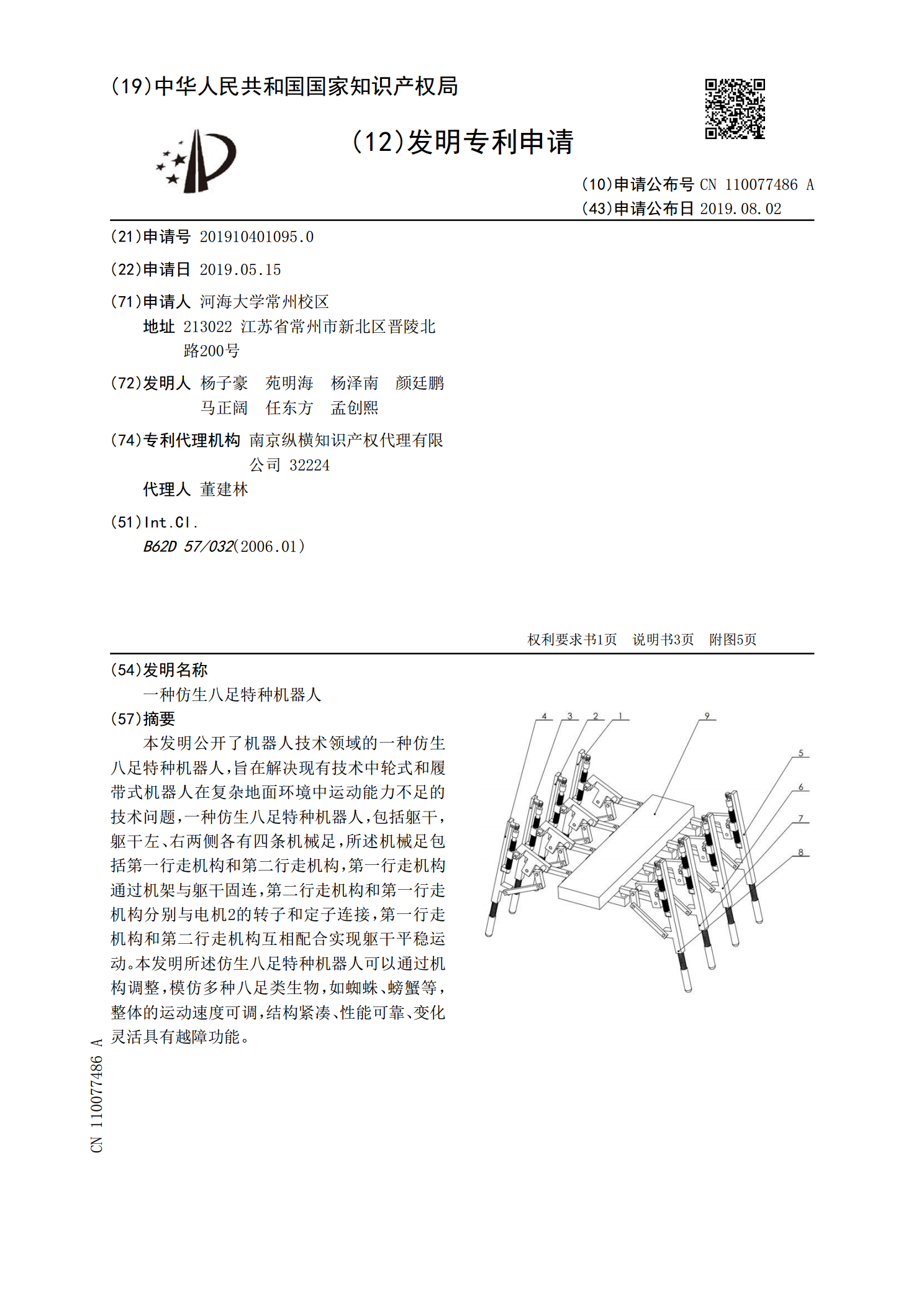
一种仿生八足特种机器人.pdf
本发明公开了机器人技术领域的一种仿生八足特种机器人,旨在解决现有技术中轮式和履带式机器人在复杂地面环境中运动能力不足的技术问题,一种仿生八足特种机器人,包括躯干,躯干左、右两侧各有四条机械足,所述机械足包括第一行走机构和第二行走机构,第一行走机构通过机架与躯干固连,第二行走机构和第一行走机构分别与电机2的转子和定子连接,第一行走机构和第二行走机构互相配合实现躯干平稳运动。本发明所述仿生八足特种机器人可以通过机构调整,模仿多种八足类生物,如蜘蛛、螃蟹等,整体的运动速度可调,结构紧凑、性能可靠、变化灵活具有越

消防侦察救援特种机器人研究.docx
消防侦察救援特种机器人研究消防侦察救援特种机器人研究摘要:近年来,随着科技的不断发展,特种机器人在消防侦察救援领域发挥着重要作用。本论文旨在对消防侦察救援特种机器人的研究进行综述,包括机器人的设计与构建、传感技术应用、路径规划与避障、人机交互等方面。通过对相关研究的分析,得出了特种机器人在消防侦察救援中的优势和局限性,并对未来的发展趋势进行了展望。1.引言消防侦察救援是一项非常危险和艰巨的任务,常常涉及到复杂的环境和高风险的情况。传统的人工救援虽然专业,但存在一定的局限性。特种机器人的出现为消防救援工作带
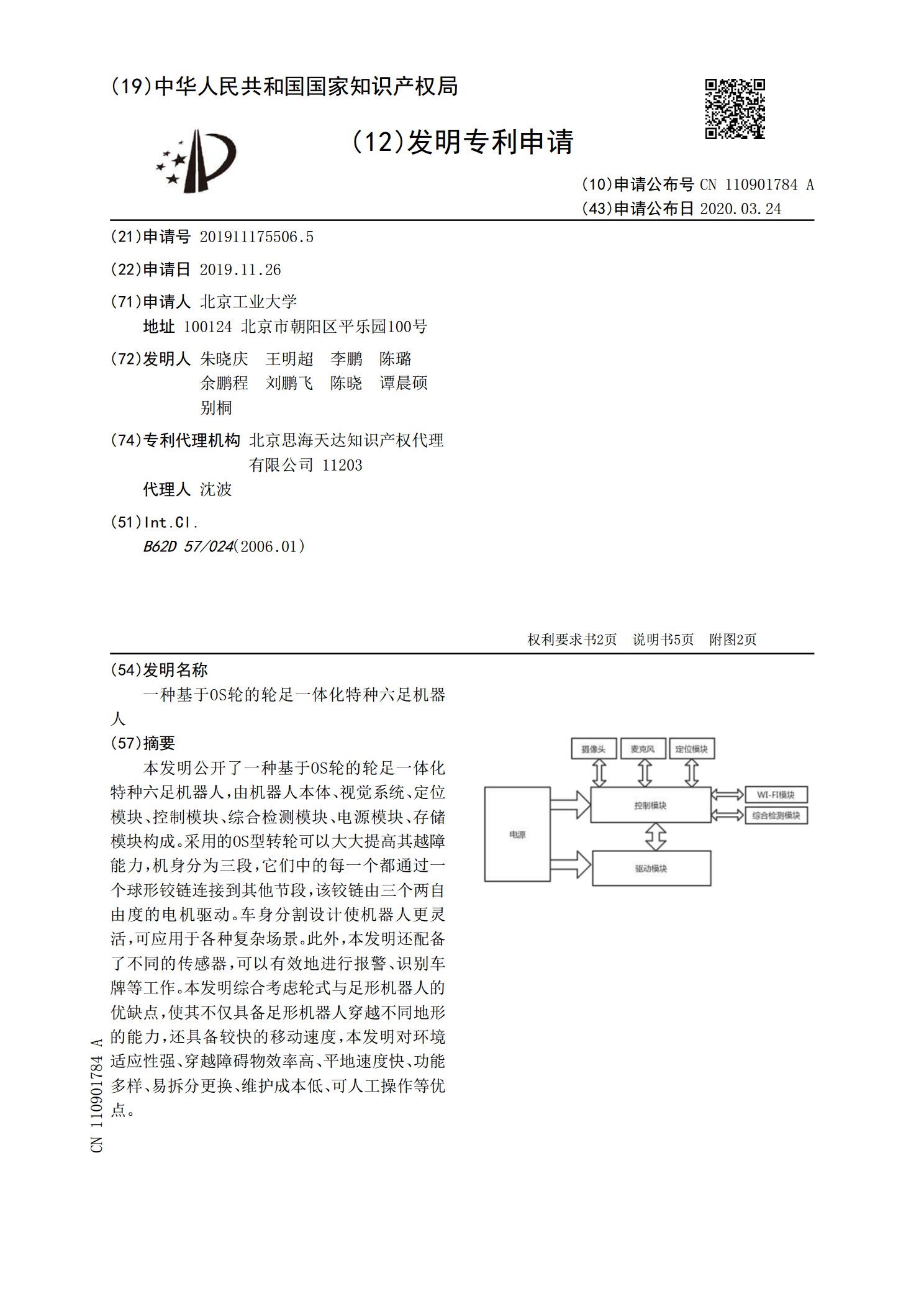
一种基于OS轮的轮足一体化特种六足机器人.pdf
本发明公开了一种基于OS轮的轮足一体化特种六足机器人,由机器人本体、视觉系统、定位模块、控制模块、综合检测模块、电源模块、存储模块构成。采用的OS型转轮可以大大提高其越障能力,机身分为三段,它们中的每一个都通过一个球形铰链连接到其他节段,该铰链由三个两自由度的电机驱动。车身分割设计使机器人更灵活,可应用于各种复杂场景。此外,本发明还配备了不同的传感器,可以有效地进行报警、识别车牌等工作。本发明综合考虑轮式与足形机器人的优缺点,使其不仅具备足形机器人穿越不同地形的能力,还具备较快的移动速度,本发明对环境适应