
一种仿生八足特种机器人.pdf

一条****轩吗


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿生八足特种机器人.pdf
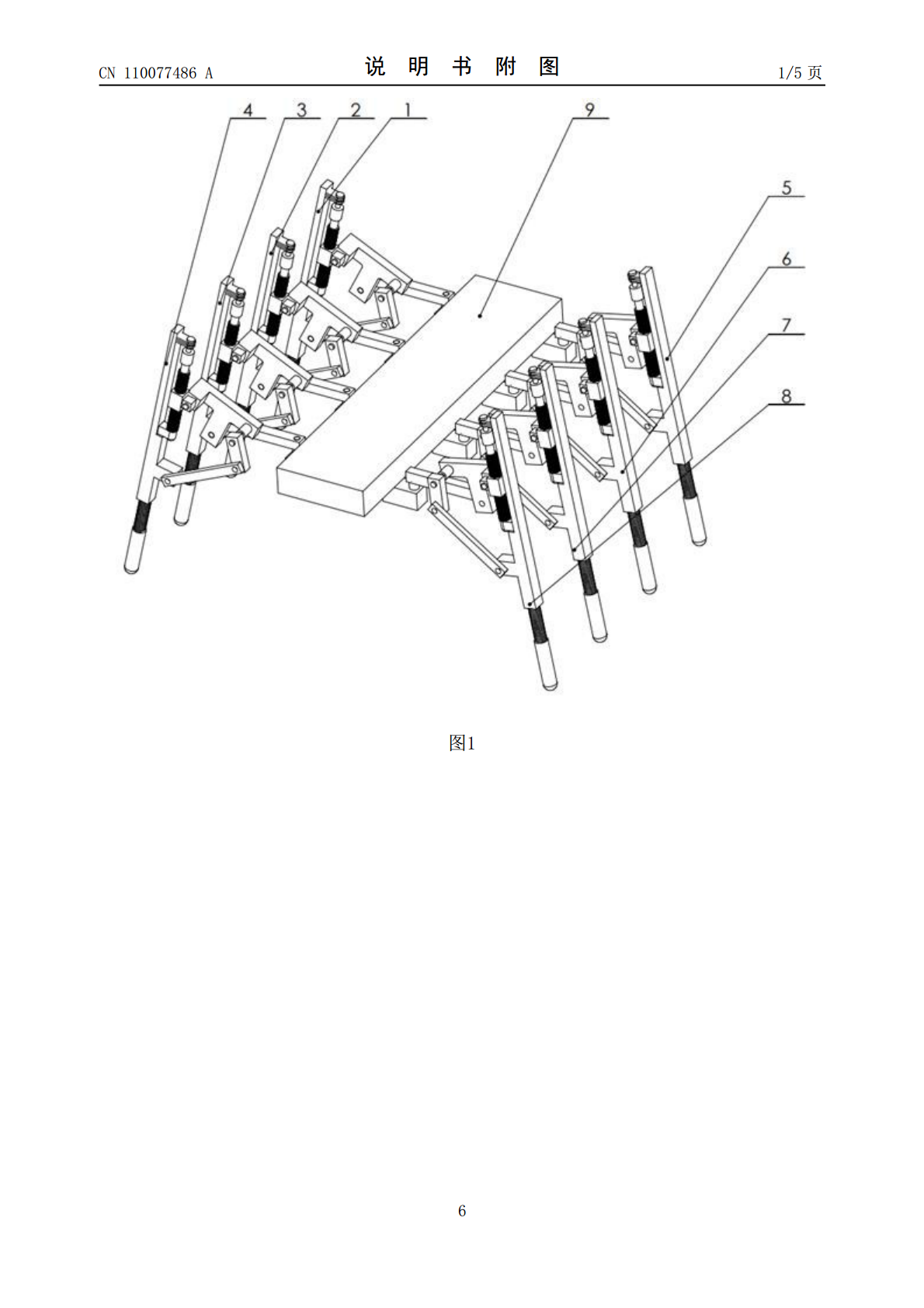
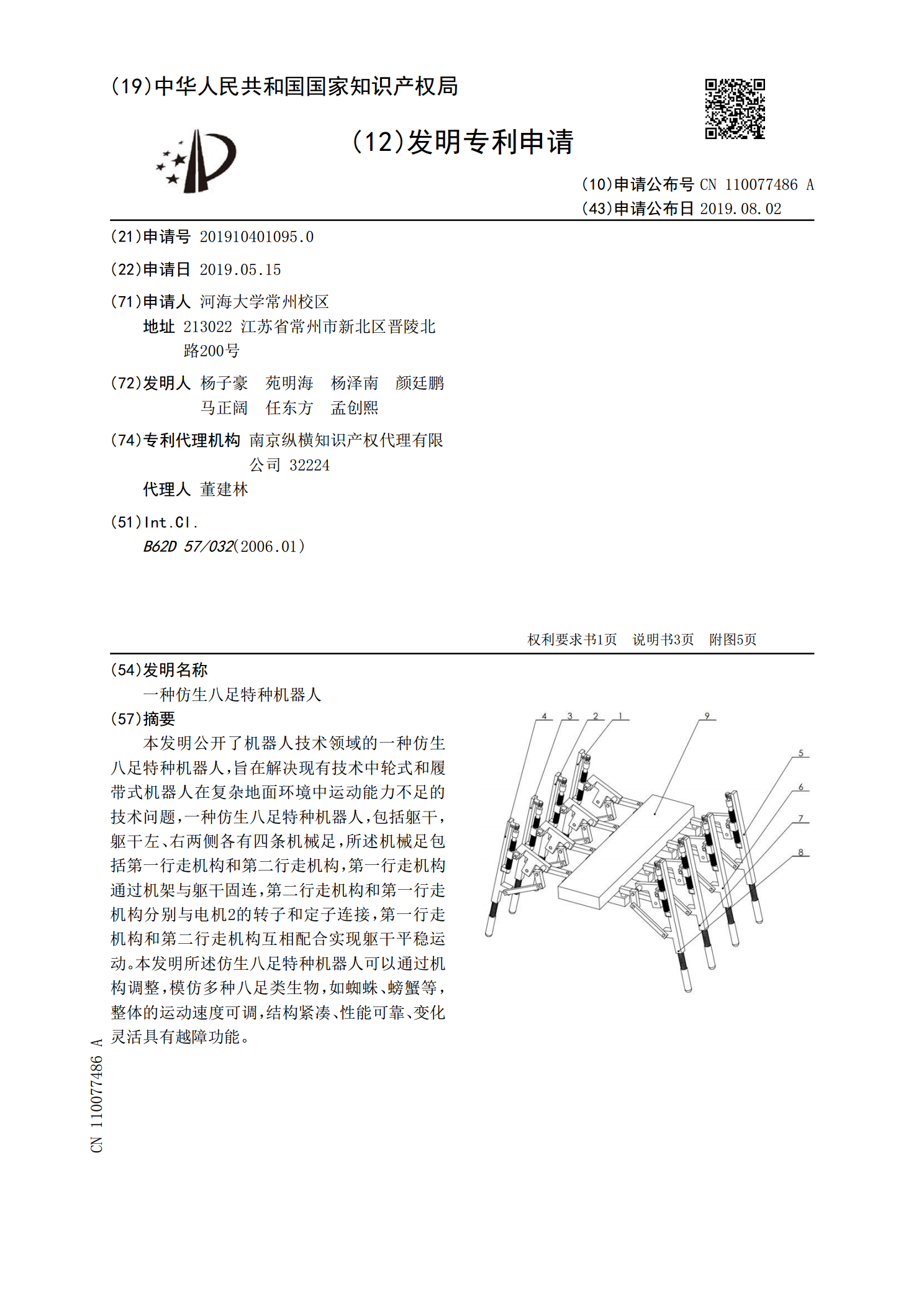
本发明公开了机器人技术领域的一种仿生八足特种机器人,旨在解决现有技术中轮式和履带式机器人在复杂地面环境中运动能力不足的技术问题,一种仿生八足特种机器人,包括躯干,躯干左、右两侧各有四条机械足,所述机械足包括第一行走机构和第二行走机构,第一行走机构通过机架与躯干固连,第二行走机构和第一行走机构分别与电机2的转子和定子连接,第一行走机构和第二行走机构互相配合实现躯干平稳运动。本发明所述仿生八足特种机器人可以通过机构调整,模仿多种八足类生物,如蜘蛛、螃蟹等,整体的运动速度可调,结构紧凑、性能可靠、变化灵活具有越
一种仿生六足机器人.pdf
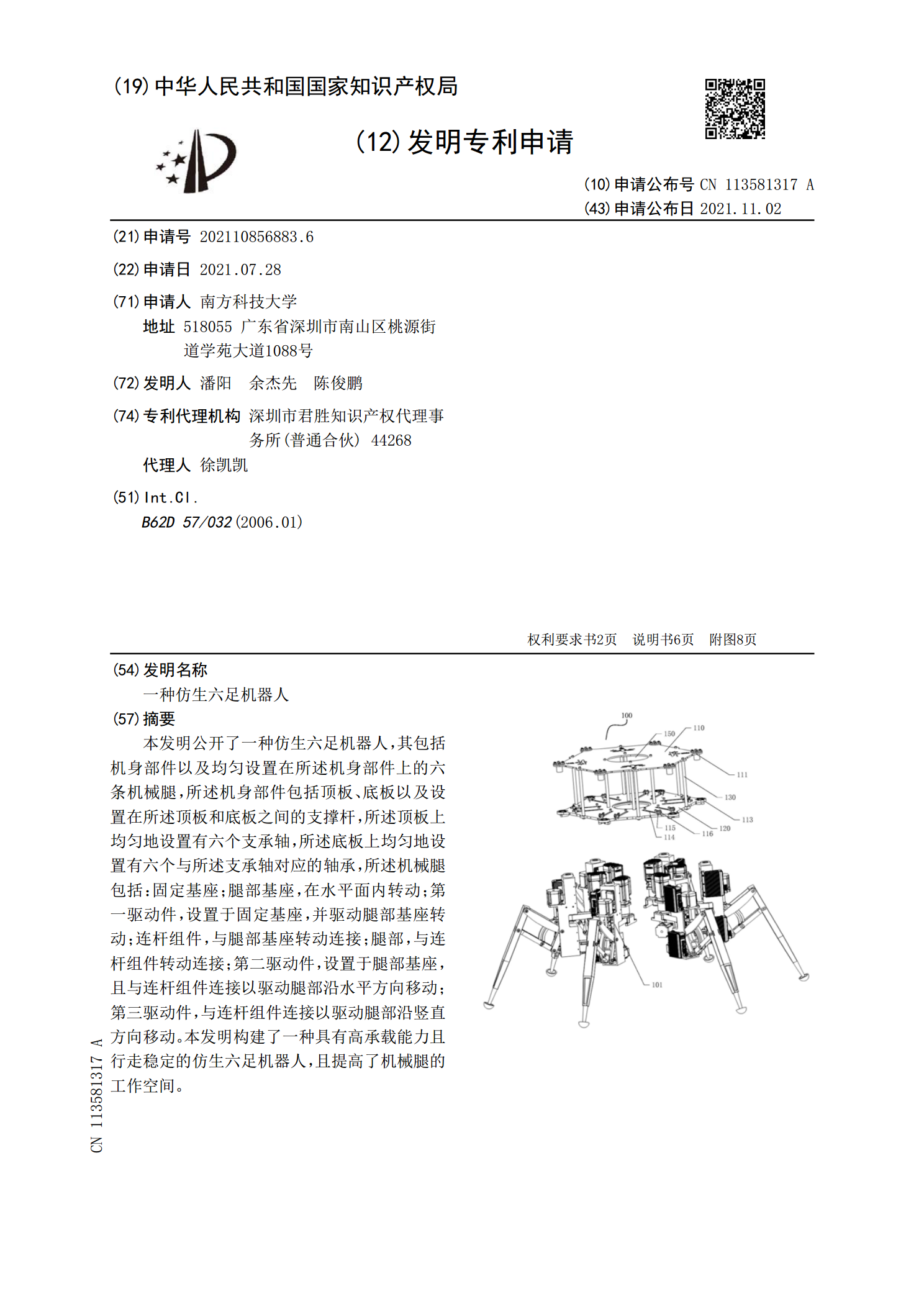
本发明公开了一种仿生六足机器人,其包括机身部件以及均匀设置在所述机身部件上的六条机械腿,所述机身部件包括顶板、底板以及设置在所述顶板和底板之间的支撑杆,所述顶板上均匀地设置有六个支承轴,所述底板上均匀地设置有六个与所述支承轴对应的轴承,所述机械腿包括:固定基座;腿部基座,在水平面内转动;第一驱动件,设置于固定基座,并驱动腿部基座转动;连杆组件,与腿部基座转动连接;腿部,与连杆组件转动连接;第二驱动件,设置于腿部基座,且与连杆组件连接以驱动腿部沿水平方向移动;第三驱动件,与连杆组件连接以驱动腿部沿竖直方向移
一种四足仿生机器人.pdf
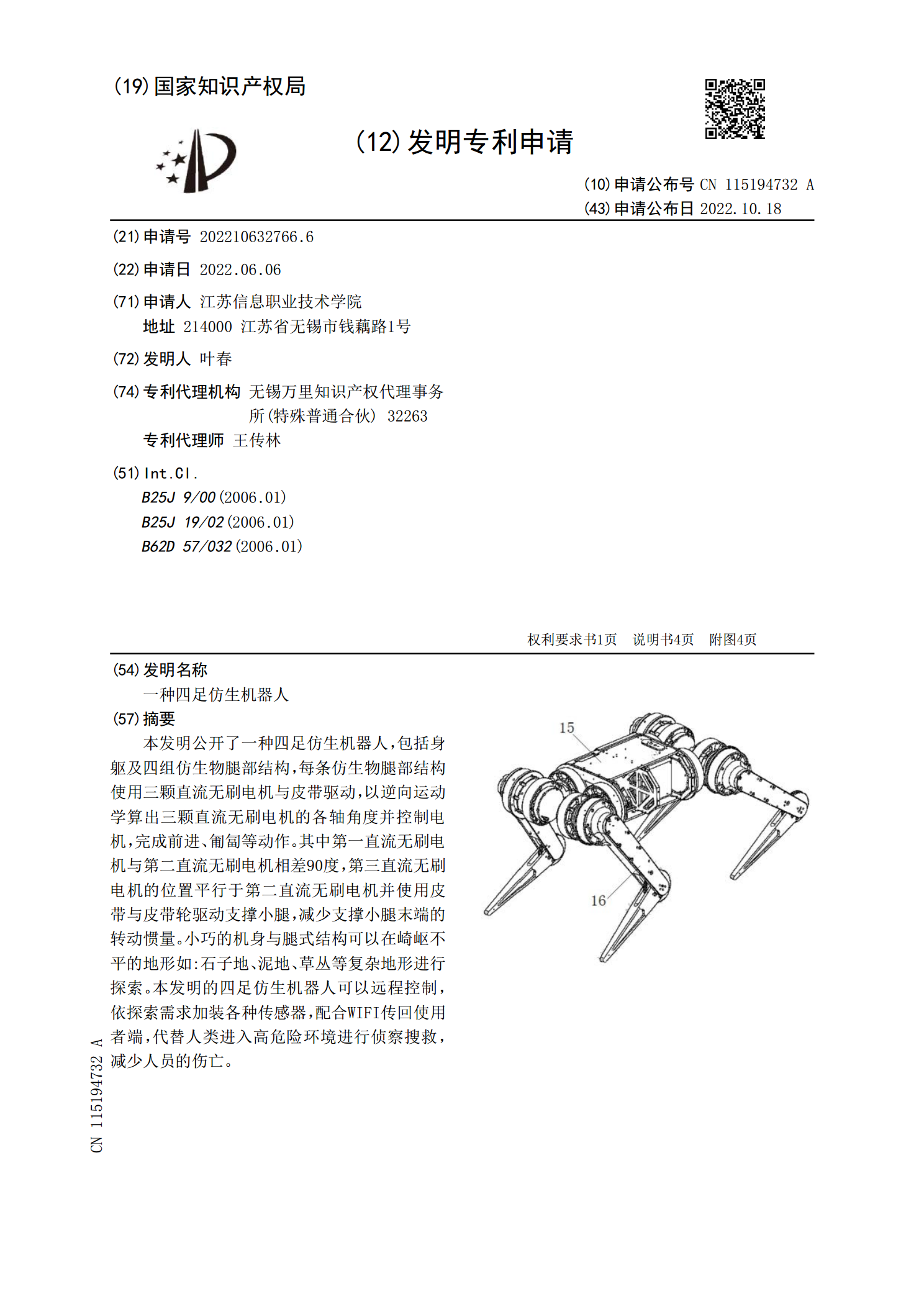
本发明公开了一种四足仿生机器人,包括身躯及四组仿生物腿部结构,每条仿生物腿部结构使用三颗直流无刷电机与皮带驱动,以逆向运动学算出三颗直流无刷电机的各轴角度并控制电机,完成前进、匍匐等动作。其中第一直流无刷电机与第二直流无刷电机相差90度,第三直流无刷电机的位置平行于第二直流无刷电机并使用皮带与皮带轮驱动支撑小腿,减少支撑小腿末端的转动惯量。小巧的机身与腿式结构可以在崎岖不平的地形如:石子地、泥地、草丛等复杂地形进行探索。本发明的四足仿生机器人可以远程控制,依探索需求加装各种传感器,配合WIFI传回使用者端
一种四足仿生行走机器人.pdf
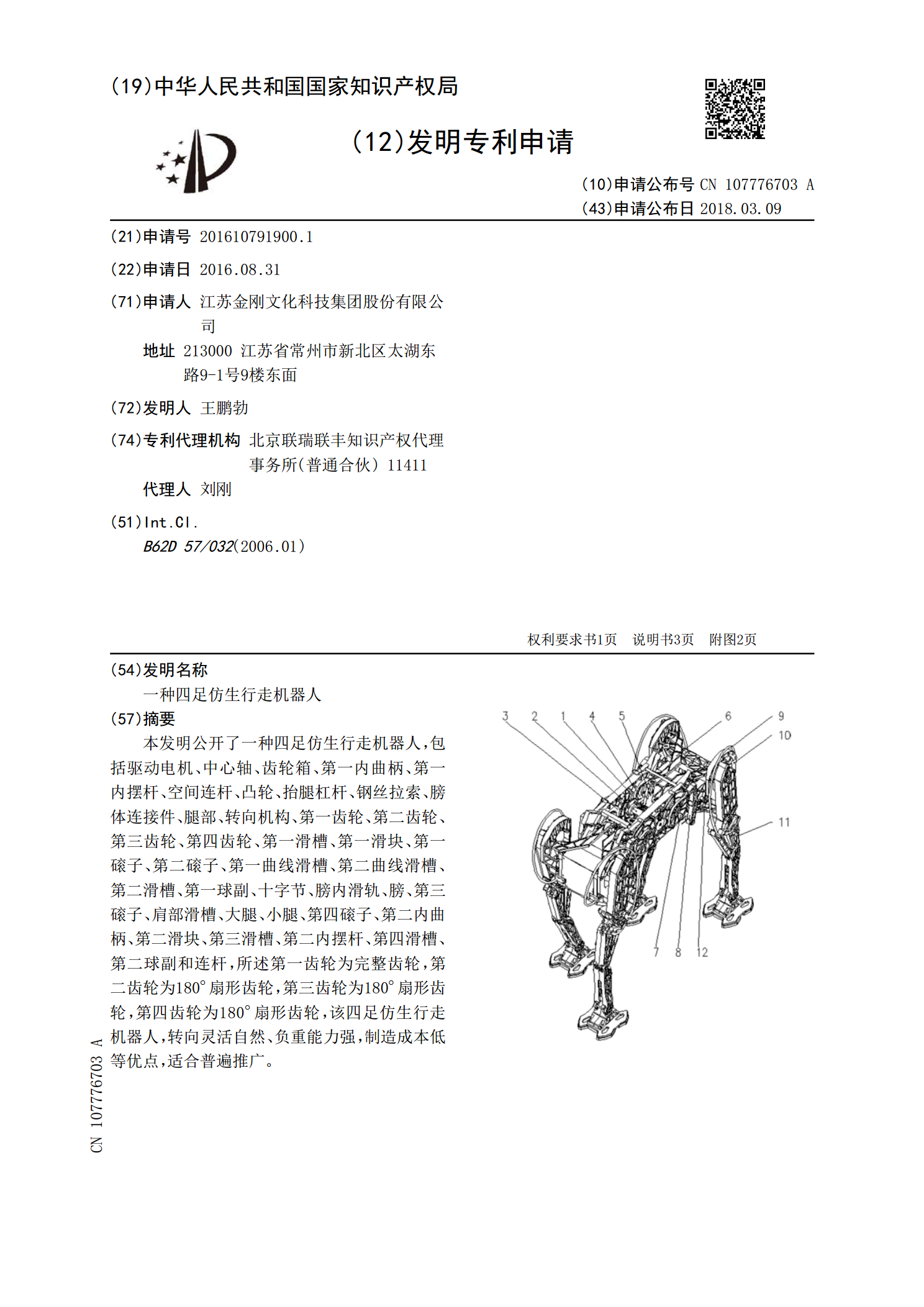
本发明公开了一种四足仿生行走机器人,包括驱动电机、中心轴、齿轮箱、第一内曲柄、第一内摆杆、空间连杆、凸轮、抬腿杠杆、钢丝拉索、膀体连接件、腿部、转向机构、第一齿轮、第二齿轮、第三齿轮、第四齿轮、第一滑槽、第一滑块、第一磙子、第二磙子、第一曲线滑槽、第二曲线滑槽、第二滑槽、第一球副、十字节、膀内滑轨、膀、第三磙子、肩部滑槽、大腿、小腿、第四磙子、第二内曲柄、第二滑块、第三滑槽、第二内摆杆、第四滑槽、第二球副和连杆,所述第一齿轮为完整齿轮,第二齿轮为180°扇形齿轮,第三齿轮为180°扇形齿轮,第四齿轮为18
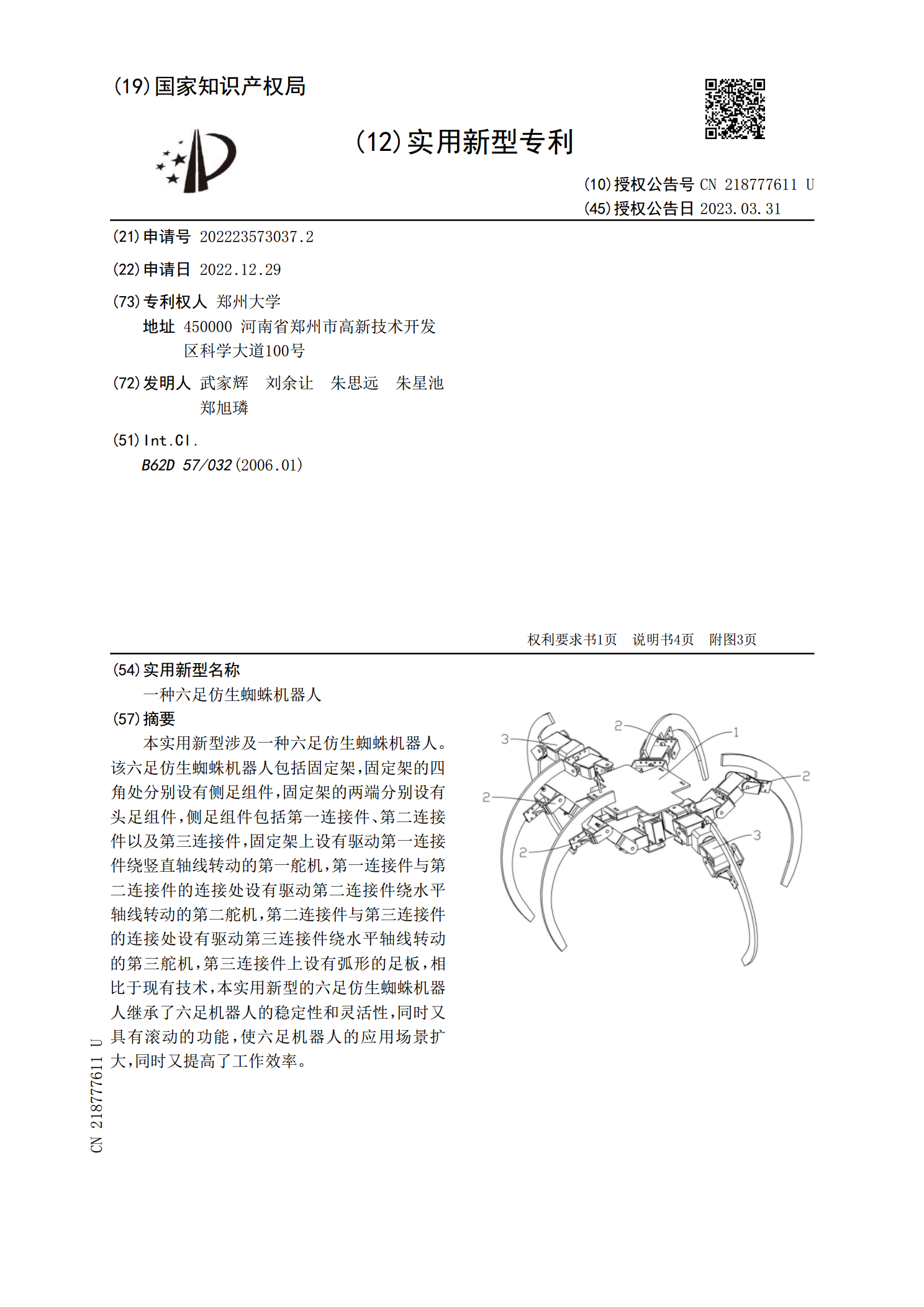
一种六足仿生蜘蛛机器人.pdf
本实用新型涉及一种六足仿生蜘蛛机器人。该六足仿生蜘蛛机器人包括固定架,固定架的四角处分别设有侧足组件,固定架的两端分别设有头足组件,侧足组件包括第一连接件、第二连接件以及第三连接件,固定架上设有驱动第一连接件绕竖直轴线转动的第一舵机,第一连接件与第二连接件的连接处设有驱动第二连接件绕水平轴线转动的第二舵机,第二连接件与第三连接件的连接处设有驱动第三连接件绕水平轴线转动的第三舵机,第三连接件上设有弧形的足板,相比于现有技术,本实用新型的六足仿生蜘蛛机器人继承了六足机器人的稳定性和灵活性,同时又具有滚动的功能