
一种舵机及用于减小舵机虚位的方法.pdf

是你****深呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种舵机及用于减小舵机虚位的方法.pdf
本发明涉及舵机技术领域,提供了一种舵机及用于减小舵机虚位的方法中,第一编码器在舵机上电时获取齿轮组输出的位置信息,第二编码器获取电机轴的位置信息,控制模块接收所述第一位置信息和所述第二位置信息,并根据所述第一位置信息、所述第二位置信息确定电机校准位置值,从而使得舵机可以避免在经过多个齿轮组转动后的输出轴作为参考位置,减小了齿轮组虚位产生的误差,解决了由于齿轮组之间的连接通常存在缝隙,从而导致几个齿轮组传动之后产生虚位,导致舵机传感器检测出的位置与理论的机械位置存在较大偏差的问题。
舵机齿轮虚位测量装置和方法.pdf
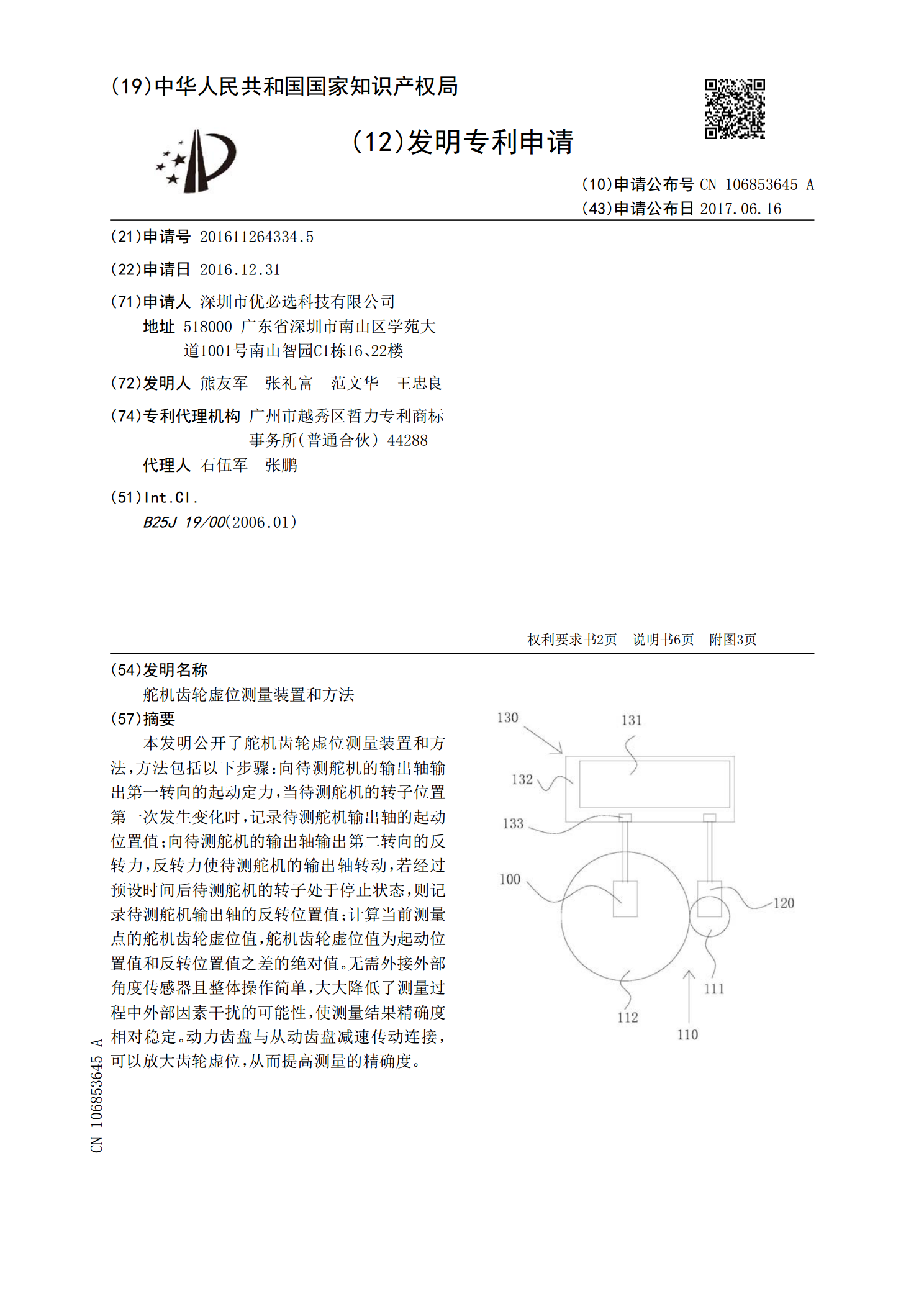
本发明公开了舵机齿轮虚位测量装置和方法,方法包括以下步骤:向待测舵机的输出轴输出第一转向的起动定力,当待测舵机的转子位置第一次发生变化时,记录待测舵机输出轴的起动位置值;向待测舵机的输出轴输出第二转向的反转力,反转力使待测舵机的输出轴转动,若经过预设时间后待测舵机的转子处于停止状态,则记录待测舵机输出轴的反转位置值;计算当前测量点的舵机齿轮虚位值,舵机齿轮虚位值为起动位置值和反转位置值之差的绝对值。无需外接外部角度传感器且整体操作简单,大大降低了测量过程中外部因素干扰的可能性,使测量结果精确度相对稳定。动

一种舵机的补偿控制方法及舵机补偿电路.pdf
本申请提供一种舵机的补偿控制方法及舵机补偿电路,属于机器人舵机控制技术领域。该方法包括:采样获取外部供电的输入电压;根据外部供电的输入电压,计算获取舵机的补偿参数;根据补偿参数,获取舵机的驱动输出。本申请可以在供电电池的电压变化时,通过采样外部供电的输入电压来对舵机进行补偿,从而稳定机器人舵机的运行状态。

一种用于副翼的扁平舵机机构.pdf
本发明公开了一种用于副翼的扁平舵机机构,属于飞行器的飞行控制技术领域,包括:承力框架、两个铰链拨杆组件、丝杆、与丝杆配合的螺母、第二换向锥齿轮、第一换向锥齿轮及电机;电机安装在承力框架上,其输出轴同轴安装有第一换向锥齿轮;丝杆上同轴安装有第二换向锥齿轮,第二换向锥齿轮与第一换向锥齿轮啮合;螺母与丝杆螺纹配合,且螺母的外圆周面延伸出两个推臂,两个推臂的末端安装有滑动轴;两个铰链拨杆组件的一端分别与副翼连接,另一端分别与承力框架连接;该机构的外形为扁平型,能够解决现有飞行器的薄翼型的空间包络技术难题,即能够在

一种用于水下航行器的舵机.pdf
一种用于水下航行器的舵机,减速器、丝杠螺母、电阻式位置传感器和接插件位于减速器一侧,且丝杠和螺母同轴布置,舵机结构紧凑,减小了舵机的安装尺寸。在丝杠中部嵌入行程嵌块,当丝杠伸出一定距离时行程嵌块与外端盖内壁贴紧,限定了丝杠的伸出距离;丝杠与驱动螺母配合一端,驱动螺母内盲孔有一定深度,丝杠回退时,丝杠靠近螺母端行程凸台与驱动螺母内孔端面贴紧,限定了丝杠的回退距离。本发明通过丝杠螺母机构的反方向行程自锁,舵机实现了牢靠的机械自锁,维持舵面的稳定。所采用的空心杯直流电机转动惯量小,丝杠螺母机构通过深沟球轴承、滚