
SINS误差特性及组合对准的方法研究的中期报告.docx

快乐****蜜蜂


1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

SINS误差特性及组合对准的方法研究的中期报告.docx
SINS误差特性及组合对准的方法研究的中期报告本研究针对惯性导航设备中常见的SINS(StrapdownInertialNavigationSystem)误差特性及其对准需要考虑的组合对准问题进行了探讨,并在中期阶段完成了相应的研究报告。针对SINS设备误差特性问题,本研究首先分析了常见的误差类型,包括安装误差、零偏误差、尺度因子误差、主轴误差等,分别给出了其数学模型和误差来源。接着,本研究列出了SINS误差补偿的常用方法,包括安装误差补偿、预先调整、定标、模型辨识等方法,并针对不同误差类型进行了详细的分

传递对准误差补偿及精度评估方法研究的中期报告.docx
传递对准误差补偿及精度评估方法研究的中期报告本研究旨在探究传递对准误差补偿及精度评估方法,以下为中期报告。一、研究背景及意义随着卫星通信技术的发展,对准误差成为了影响传输可靠性和精度的重要因素。传递对准误差补偿及精度评估方法的研究对于提高传输质量、优化卫星通信系统性能具有重要的理论和实际应用意义。二、研究进展1.对国内外传递对准误差补偿及精度评估方法进行了文献调研和综述分析。2.对准误差补偿机理进行了分析与建模,在此基础上,提出了一种基于误差分离的补偿方法,并进行了仿真验证。3.对于传输系统误差来源,进行

北斗SINS组合导航系统研究的中期报告.docx
北斗SINS组合导航系统研究的中期报告中期报告:北斗SINS组合导航系统研究本文介绍了北斗SINS组合导航系统的中期研究进展。该系统结合了北斗卫星导航系统和SINS(StrapdownInertialNavigationSystem)惯性导航系统,以提高导航精度和鲁棒性。本文重点关注以下三个方面的研究:1.北斗接收机输出的信号处理北斗卫星导航系统提供的是伪距和载波相位信息,但接收机输出的信号存在噪声和误差。因此需要对信号进行滤波和校正,以提高定位精度和鲁棒性。我们通过实验测试了不同滤波器的效果,并对接收机

粒子滤波方法在SINS初始对准中的应用研究的开题报告.docx
粒子滤波方法在SINS初始对准中的应用研究的开题报告一、选题背景与意义惯性导航系统(SINS)是一种可以在不依赖于外部信号或者场景的情况下,利用惯性测量单元(包括加速度计和陀螺仪)进行航位信息推算和姿态解算的方案。在实际的应用场景中,SINS往往需要进行初始对准才能达到足够的精度和可靠性。现有的SINS初始对准技术主要包括方位表、星敏感器、GPS、地磁敏感器等,但是这些技术普遍存在对天气、环境、精度等方面的限制。粒子滤波(PF)是一种基于概率密度函数的非线性滤波方法,可以对随机变量进行估计。近年来,PF在
一种基于优化对准的SINS/DVL安装误差角标校方法.pdf
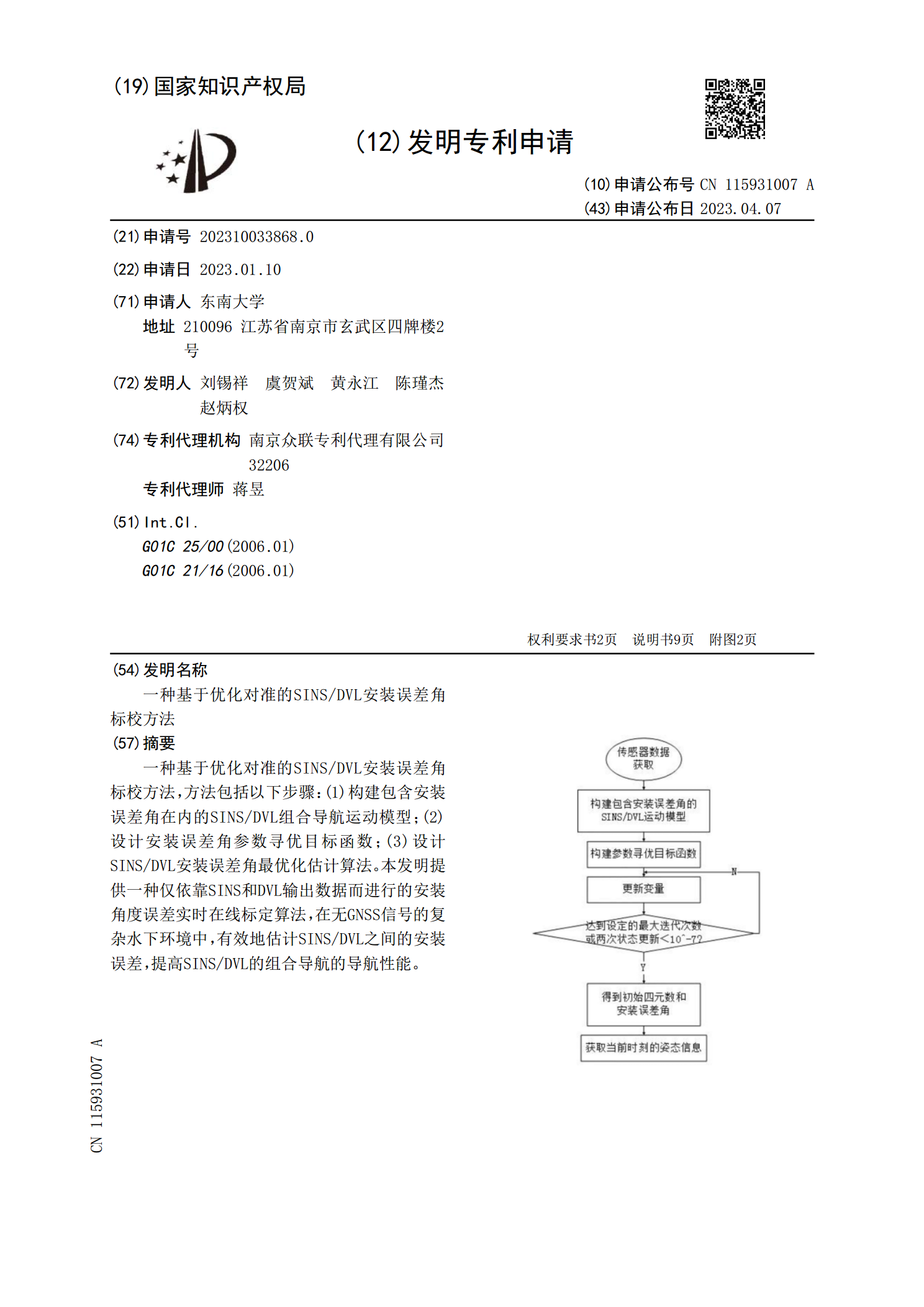
一种基于优化对准的SINS/DVL安装误差角标校方法,方法包括以下步骤:(1)构建包含安装误差角在内的SINS/DVL组合导航运动模型;(2)设计安装误差角参数寻优目标函数;(3)设计SINS/DVL安装误差角最优化估计算法。本发明提供一种仅依靠SINS和DVL输出数据而进行的安装角度误差实时在线标定算法,在无GNSS信号的复杂水下环境中,有效地估计SINS/DVL之间的安装误差,提高SINS/DVL的组合导航的导航性能。