
一种汽车自适应辅助制动系统及其控制方法.pdf

一只****签网


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种汽车自适应辅助制动系统及其控制方法.pdf
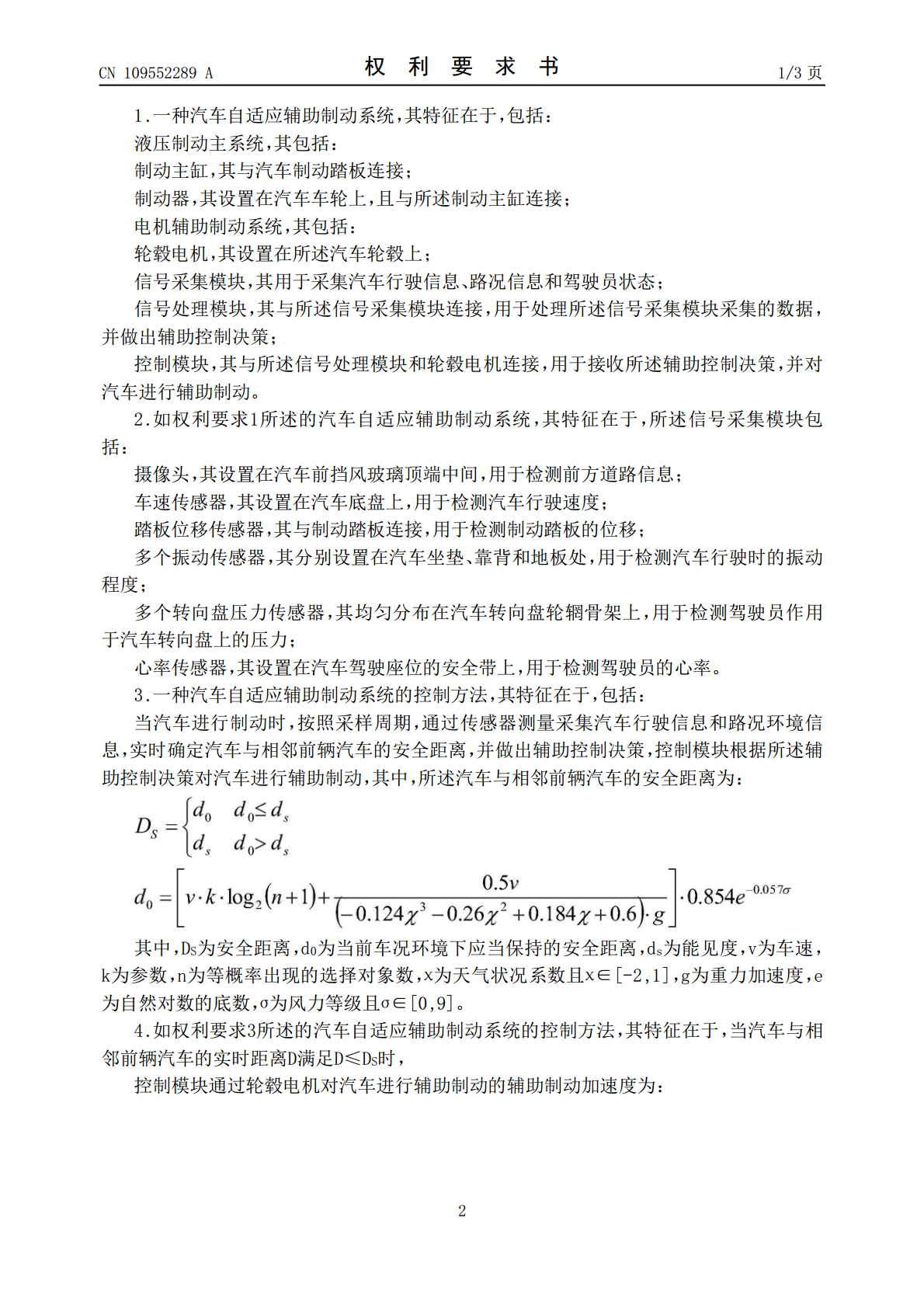
本发明公开一种汽车自适应辅助制动系统,包括:液压制动主系统,其包括:制动主缸,其与汽车制动踏板连接;制动器,其设置在汽车车轮上,且与所述制动主缸连接;电机辅助制动系统,其包括:轮毂电机,其设置在所述汽车轮毂上;信号采集模块,其用于采集汽车行驶信息、路况信息和驾驶员状态;信号处理模块,其与所述信号采集模块连接,用于处理所述信号采集模块采集的数据,并做出辅助控制决策;控制模块,其与所述信号处理模块和轮毂电机连接,用于接收所述辅助控制决策,并对汽车进行辅助制动。本发明还提供一种汽车自适应辅助制动系统的控制方法,

一种汽车线控制动系统及其制动方法.pdf
本发明公开了一种汽车线控制动系统及其制动方法,属于电动汽车制动技术领域,包括液压制动单元,用于四个轮缸液压管路的油压进行分配,实现四个车轮轮缸的制动;踏板模拟单元,分别与液压制动单元、建压单元、油壶、车辆控制器相连,用于识别驾驶员制动意图,并将信号传送至车辆控制器进行车辆制动。建压单元,分别与液压制动单元、踏板模拟单元、油壶、车辆控制器相连,用于在车辆制动过程中进行制动助力,并将液压力传送至液压制动单元,完成线控制动。本发明既具备传统线控制动系统的压力容易控制,可模拟踏板感觉的功能;又具备自动驾驶的主动制
一种电动汽车用液压辅助驱动/制动系统及其控制方法.pdf
本发明的一种电动汽车用液压辅助驱动/制动系统及其控制方法,属于电动汽车液压运用技术领域,所述液压辅助驱动/制动系统包括马达增速机构、后轮、液压阀组、蓄能器、电子控制单元、动力电池、电机、行星齿轮、前轮、驱动桥、定轴齿轮、万向节、高压变量泵、油罐、制动踏板、油门踏板和锁定器。本发明旨在解决现有前驱电动汽车在坏路面上通过性差、高速超车时转矩不足,低速制动时电机制动转矩低的问题。

汽车制动辅助系统、汽车及汽车的辅助刹车控制方法.pdf
本发明提供了一种汽车制动辅助系统,安装于汽车上,用于对汽车在制动过程中提供辅助制动作用力,汽车制动辅助系统包括辅助减速装置、执行器和控制器。所述辅助减速装置包括制动钳、制动盘和支撑架,所述支撑架支撑所述制动钳,所述制动钳与所述制动盘配合以辅助刹车;所述执行器与所述辅助减速装置连接并可驱动其进行减速动作;所述控制器与所述执行器信号连接并可控制所述执行器动作。本发明的汽车制动辅助系统可以有效缩短汽车的制动距离。

一种液压辅助驱动与制动系统及其控制方法.pdf
本发明公开了一种液压辅助驱动与制动系统,解决现有商用载货汽车在坏路面上通过性差及在长时间行车制动时制动不稳定的问题,其包括发动机、离合器、变速箱、后驱动桥、两个前轮、加速踏板、制动踏板、车架、取力器、轴向斜盘式高压变量泵、三位四通电磁换向阀、电液比例溢流阀、热交换器、安全阀组、两个结构相同的液压定量马达、油罐和电子控制单元,其中,轴向斜盘式高压变量泵与三位四通电磁换向阀管道连接,三位四通电磁换向阀分别与安全阀组、电液比例溢流阀、油罐管道连,2个结构相同的液压定量马达与轴向斜盘式高压变量泵管道连接;本发明同