
一种智能麦克纳姆轮.pdf

a是****澜吖

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能麦克纳姆轮.pdf
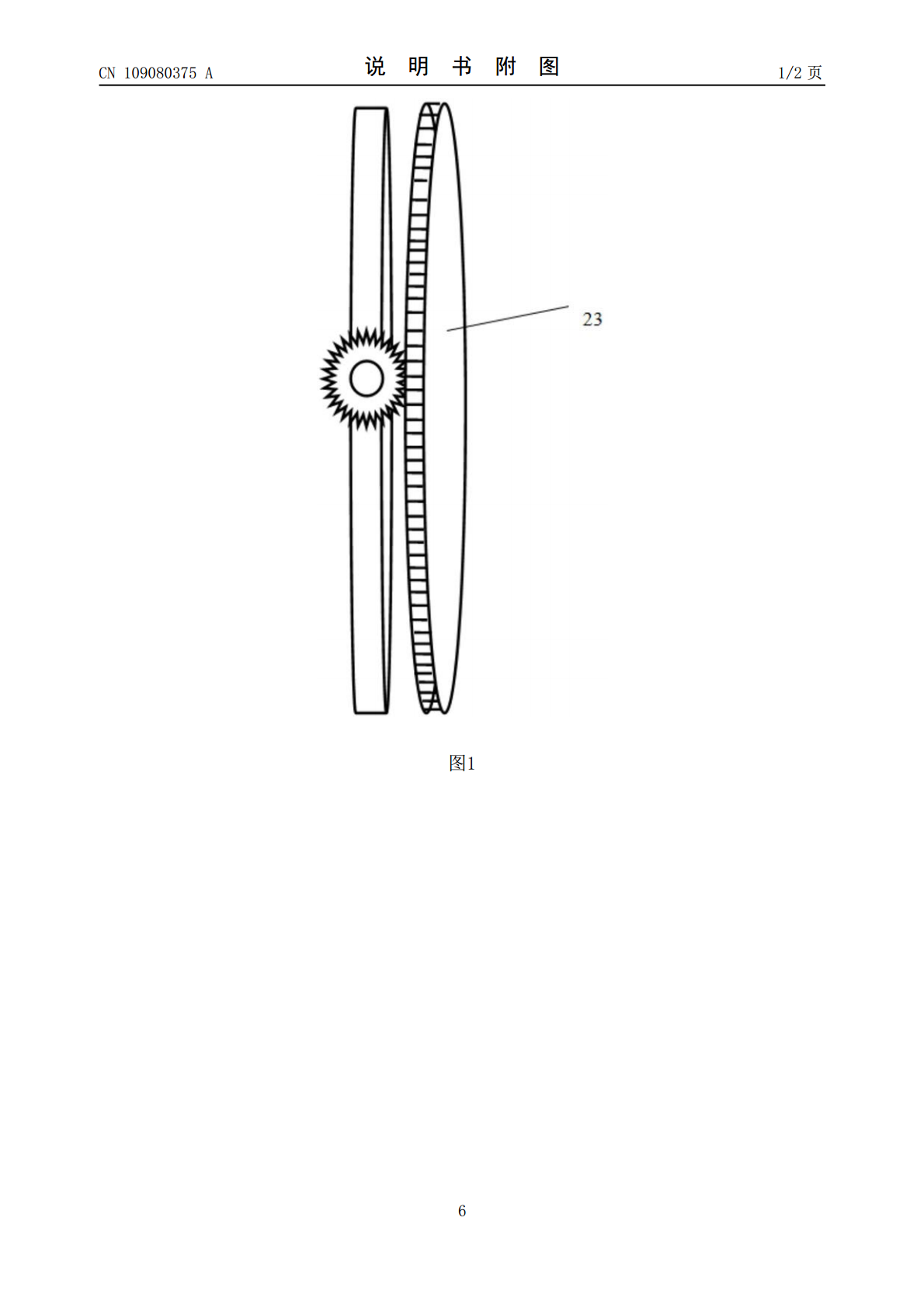
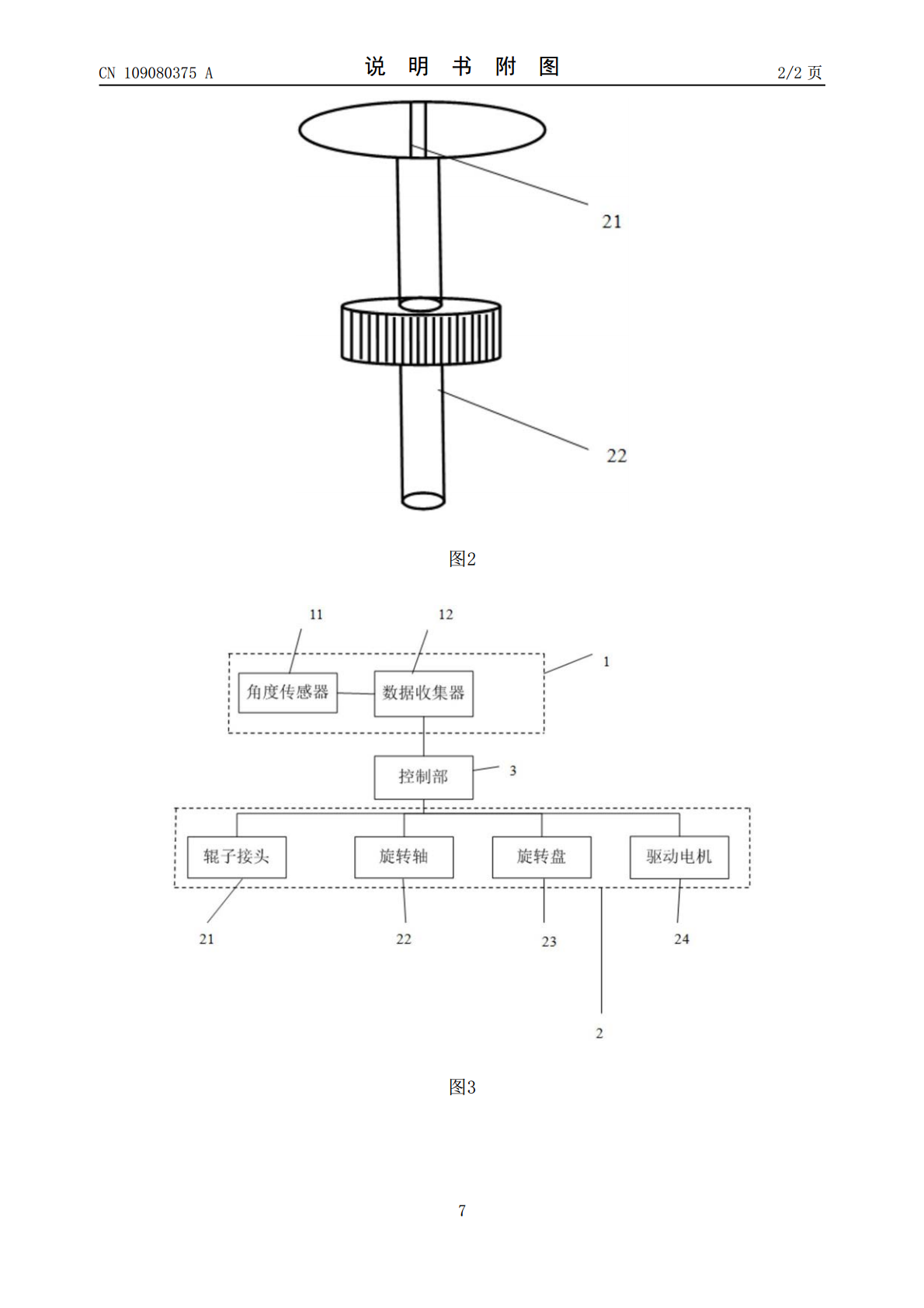
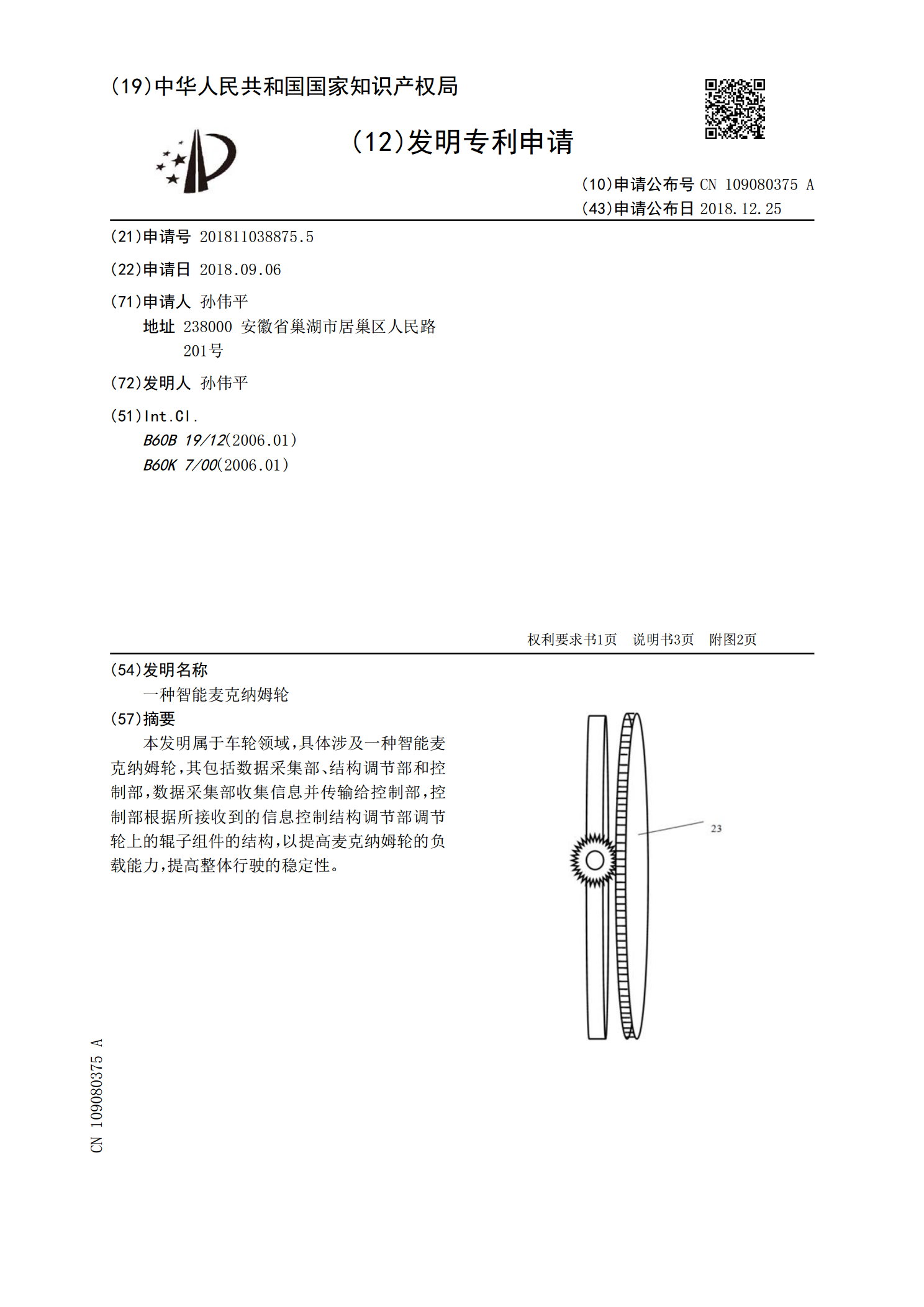
本发明属于车轮领域,具体涉及一种智能麦克纳姆轮,其包括数据采集部、结构调节部和控制部,数据采集部收集信息并传输给控制部,控制部根据所接收到的信息控制结构调节部调节轮上的辊子组件的结构,以提高麦克纳姆轮的负载能力,提高整体行驶的稳定性。
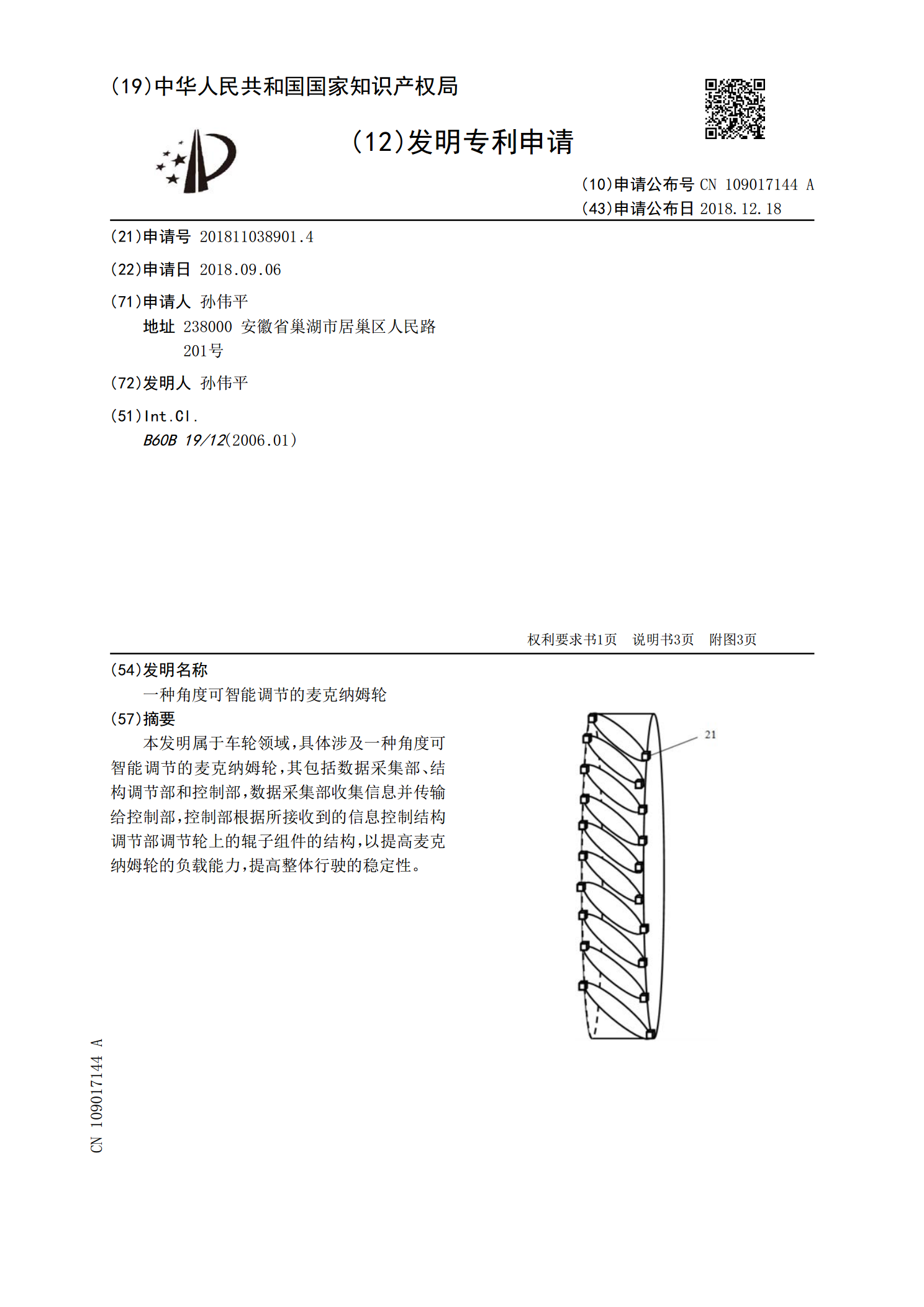
一种角度可智能调节的麦克纳姆轮.pdf
本发明属于车轮领域,具体涉及一种角度可智能调节的麦克纳姆轮,其包括数据采集部、结构调节部和控制部,数据采集部收集信息并传输给控制部,控制部根据所接收到的信息控制结构调节部调节轮上的辊子组件的结构,以提高麦克纳姆轮的负载能力,提高整体行驶的稳定性。
麦克纳姆轮.ppt
电动轮椅的简介电动轮椅的研究意义电动轮椅的研究方向轮椅控制系统逻辑图电动轮椅的详细设计1.轮椅主架设计2.电机的计算和选型以及电机控制电机的选择增量式编码器旋转编码器3.控制电路BTS7960全桥驱动电路示意图4.麦克纳姆轮的结构与选择全向轮的选择QLM-156寸90度全向轮5.升降装置的选型6.电池的选型其他成本核算
基于麦克纳姆轮WIFI视频智能小车.pdf
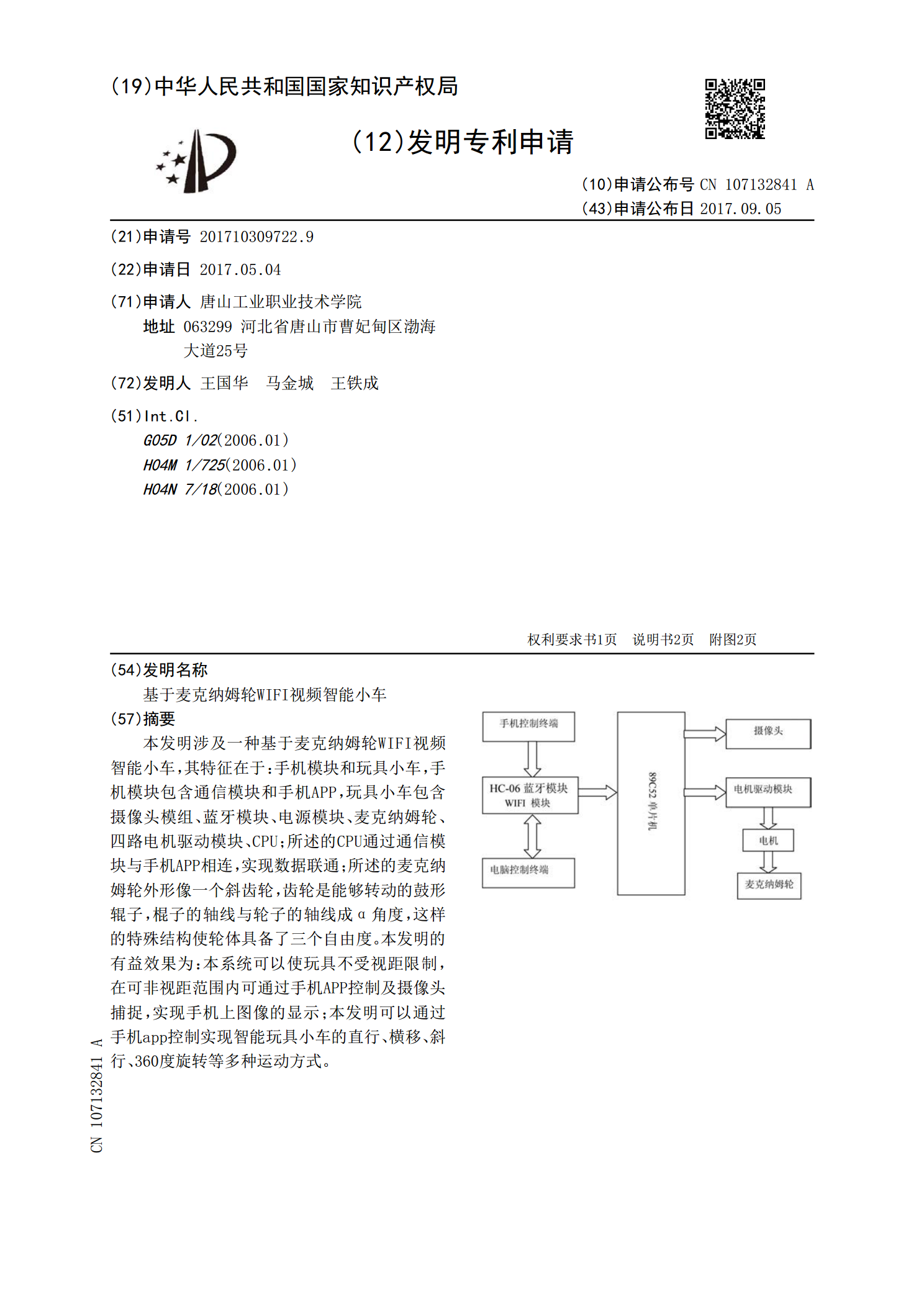
本发明涉及一种基于麦克纳姆轮WIFI视频智能小车,其特征在于:手机模块和玩具小车,手机模块包含通信模块和手机APP,玩具小车包含摄像头模组、蓝牙模块、电源模块、麦克纳姆轮、四路电机驱动模块、CPU;所述的CPU通过通信模块与手机APP相连,实现数据联通;所述的麦克纳姆轮外形像一个斜齿轮,齿轮是能够转动的鼓形辊子,棍子的轴线与轮子的轴线成α角度,这样的特殊结构使轮体具备了三个自由度。本发明的有益效果为:本系统可以使玩具不受视距限制,在可非视距范围内可通过手机APP控制及摄像头捕捉,实现手机上图像的显示;本发
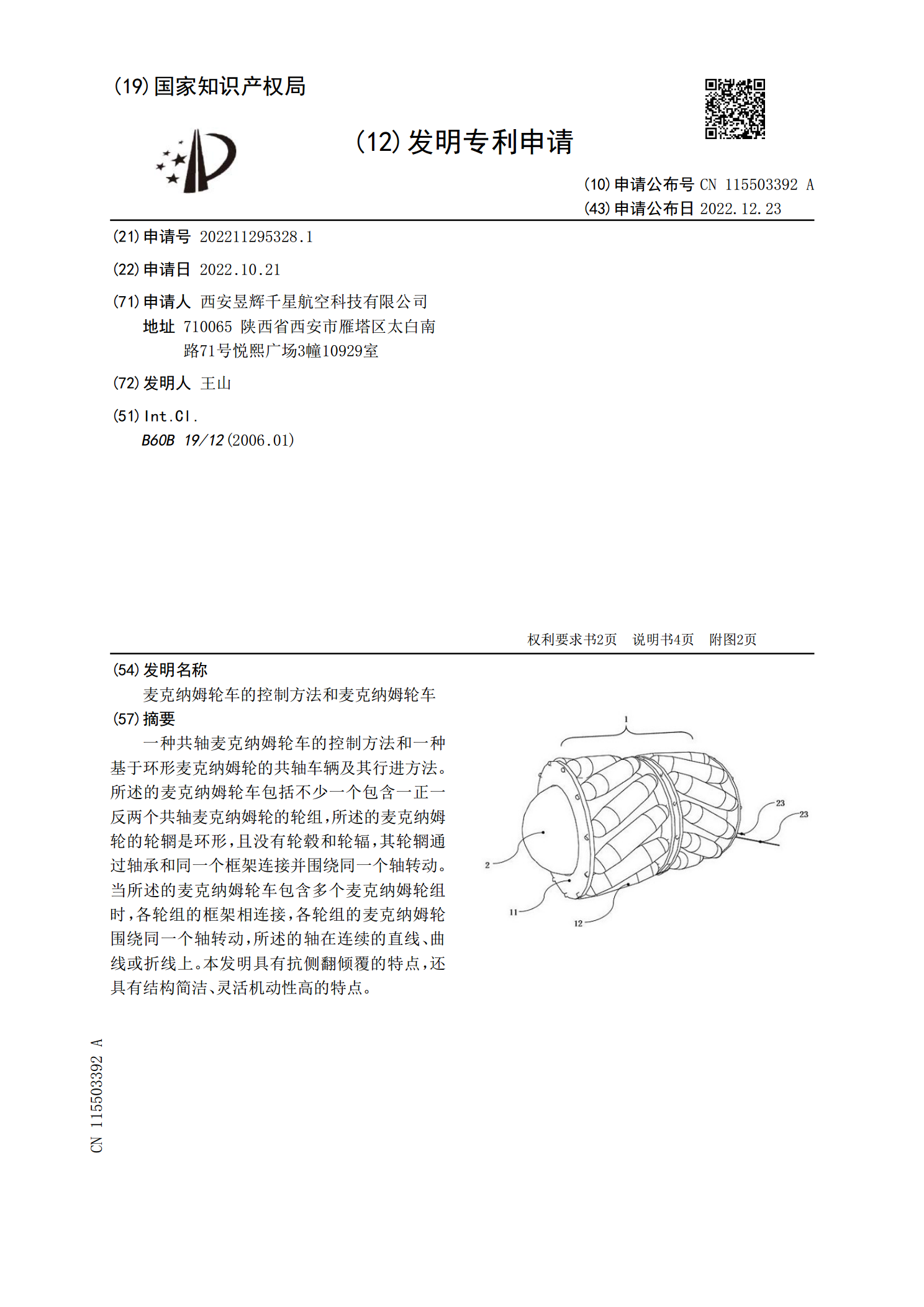
麦克纳姆轮车的控制方法和麦克纳姆轮车.pdf
一种共轴麦克纳姆轮车的控制方法和一种基于环形麦克纳姆轮的共轴车辆及其行进方法。所述的麦克纳姆轮车包括不少一个包含一正一反两个共轴麦克纳姆轮的轮组,所述的麦克纳姆轮的轮辋是环形,且没有轮毂和轮辐,其轮辋通过轴承和同一个框架连接并围绕同一个轴转动。当所述的麦克纳姆轮车包含多个麦克纳姆轮组时,各轮组的框架相连接,各轮组的麦克纳姆轮围绕同一个轴转动,所述的轴在连续的直线、曲线或折线上。本发明具有抗侧翻倾覆的特点,还具有结构简洁、灵活机动性高的特点。