
一种智能AGV搬运车.pdf

一条****88

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能AGV搬运车.pdf
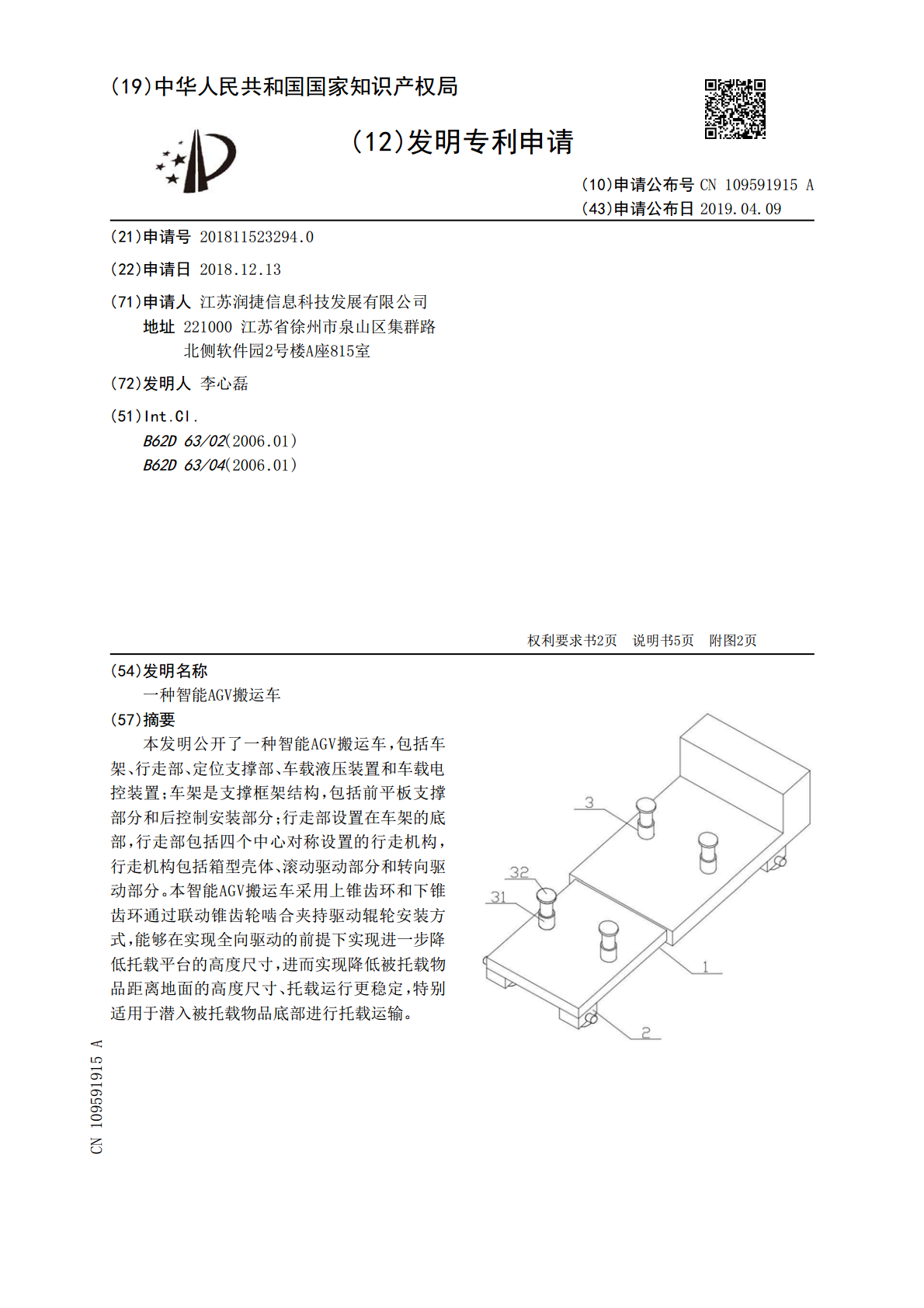
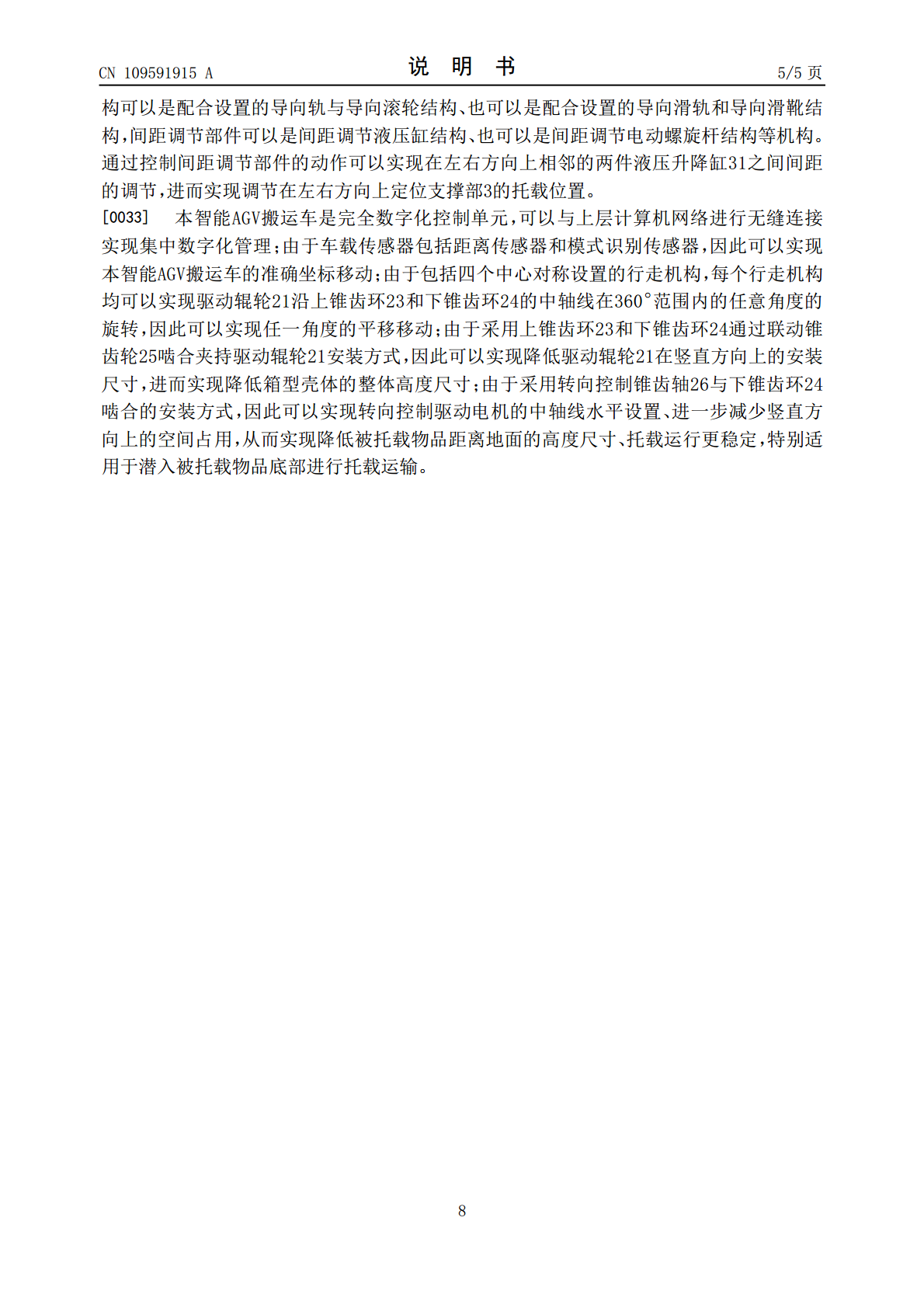
本发明公开了一种智能AGV搬运车,包括车架、行走部、定位支撑部、车载液压装置和车载电控装置;车架是支撑框架结构,包括前平板支撑部分和后控制安装部分;行走部设置在车架的底部,行走部包括四个中心对称设置的行走机构,行走机构包括箱型壳体、滚动驱动部分和转向驱动部分。本智能AGV搬运车采用上锥齿环和下锥齿环通过联动锥齿轮啮合夹持驱动辊轮安装方式,能够在实现全向驱动的前提下实现进一步降低托载平台的高度尺寸,进而实现降低被托载物品距离地面的高度尺寸、托载运行更稳定,特别适用于潜入被托载物品底部进行托载运输。

一种拖拽式AGV智能无人搬运车挂载装置.pdf
一种拖拽式AGV智能无人搬运车挂载装置,挂钩部分由转动挂钩、棘轮、连杆A、连杆B、扭簧、固定板、连杆C、重力摆锤、万向滚珠、连杆箱组成;挂载箱部分由斜坡A、斜坡B、斜坡形挡板组成,挂钩部分通过转动挂钩前端的万向滚珠卡入挂载箱部分的斜坡A与斜坡B之间空间,当AGV无人搬运车车上的挂钩通过挂载箱上的斜坡型挡板进入挂载箱时,其拖拽式货物车在牵引力及扭簧的共同作用下,实现稳定的自动挂载作用;当AGV小车后退固定距离时,挂钩在万向滚珠作用下通过斜坡,挂钩向上转动,在扭簧作用下通过挂载箱斜坡型挡板发生扭转,从而使挂钩
一种无人AGV迷你搬运车.pdf
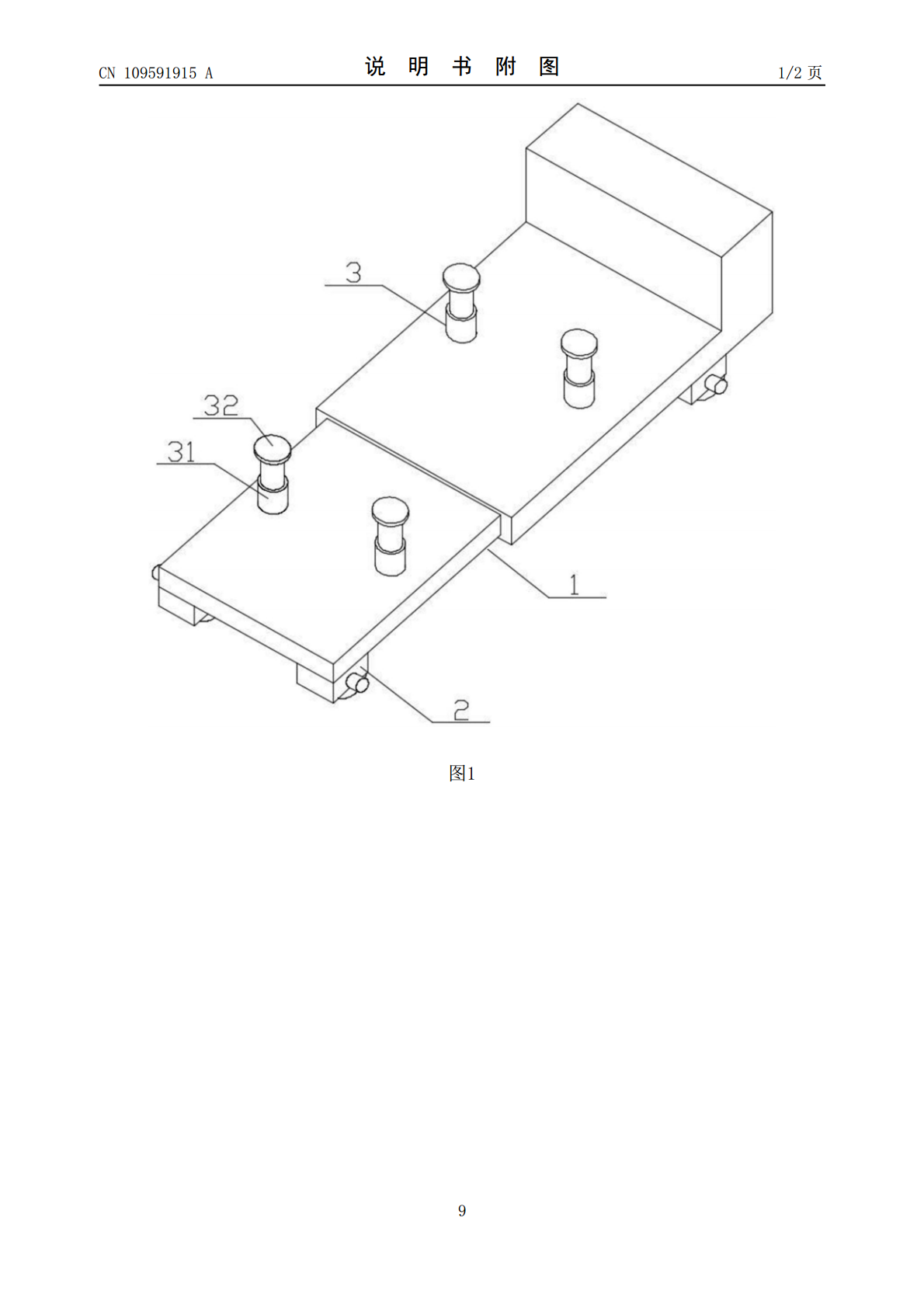
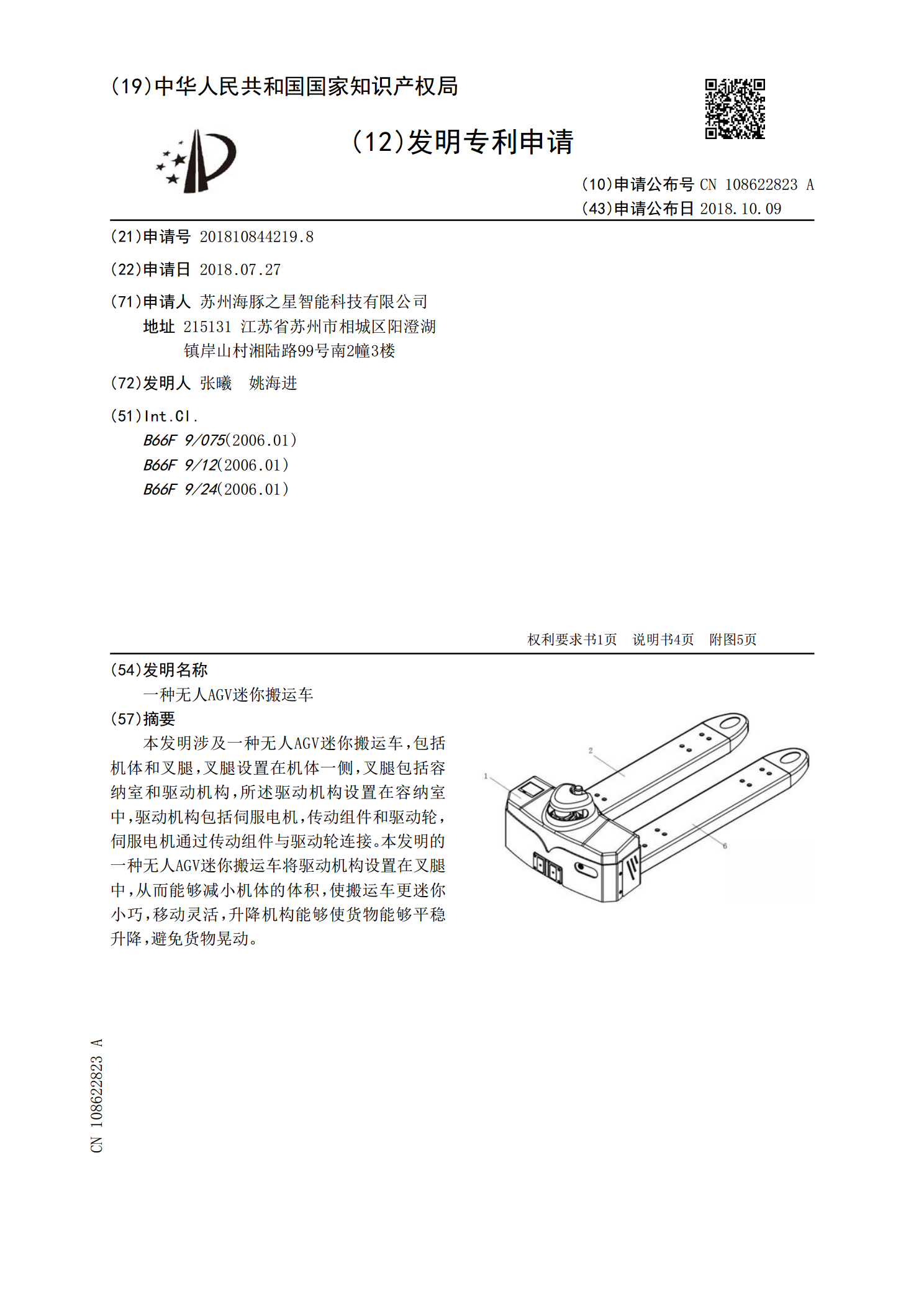
本发明涉及一种无人AGV迷你搬运车,包括机体和叉腿,叉腿设置在机体一侧,叉腿包括容纳室和驱动机构,所述驱动机构设置在容纳室中,驱动机构包括伺服电机,传动组件和驱动轮,伺服电机通过传动组件与驱动轮连接。本发明的一种无人AGV迷你搬运车将驱动机构设置在叉腿中,从而能够减小机体的体积,使搬运车更迷你小巧,移动灵活,升降机构能够使货物能够平稳升降,避免货物晃动。
一种升降装置及AGV搬运车.pdf
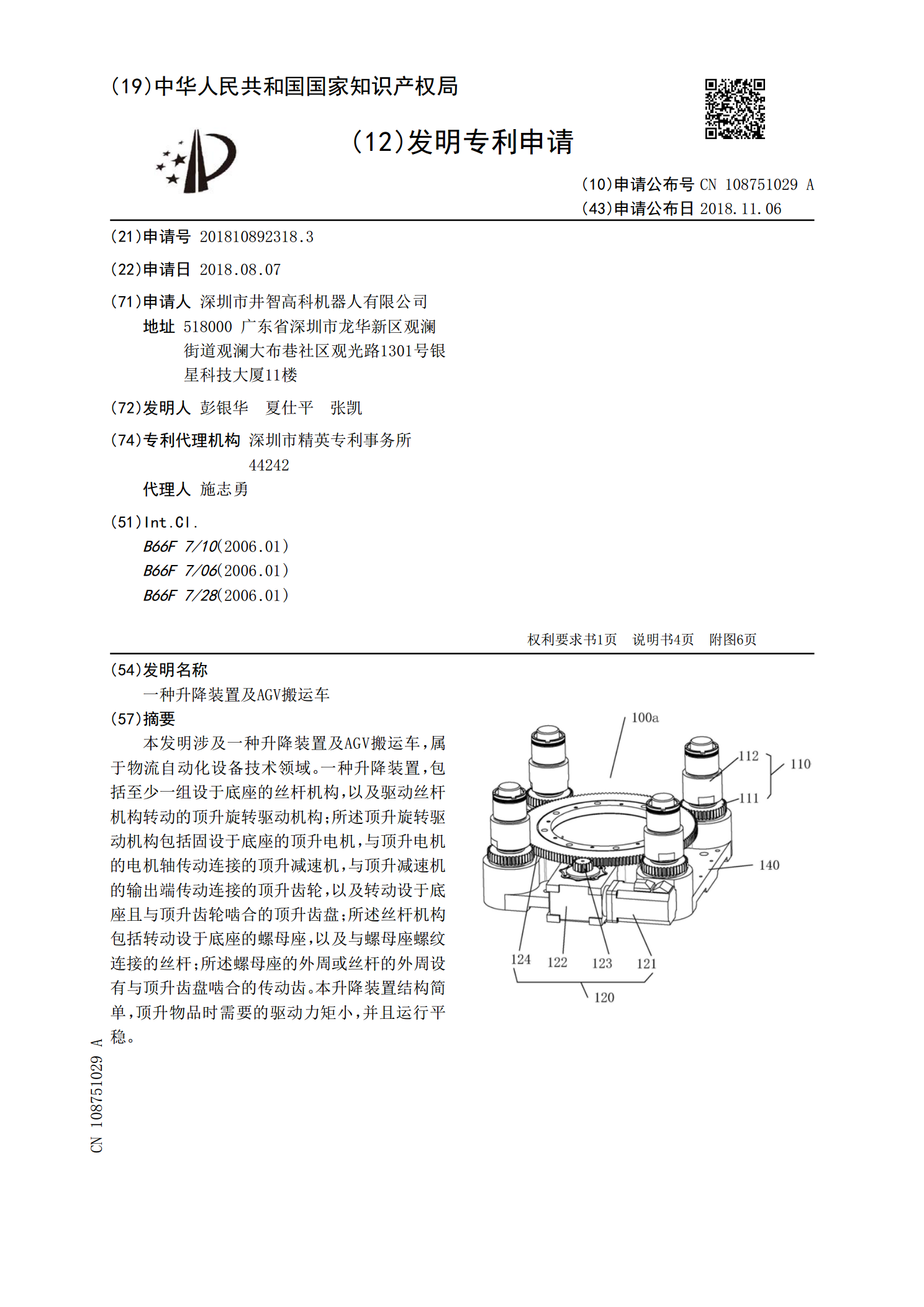
本发明涉及一种升降装置及AGV搬运车,属于物流自动化设备技术领域。一种升降装置,包括至少一组设于底座的丝杆机构,以及驱动丝杆机构转动的顶升旋转驱动机构;所述顶升旋转驱动机构包括固设于底座的顶升电机,与顶升电机的电机轴传动连接的顶升减速机,与顶升减速机的输出端传动连接的顶升齿轮,以及转动设于底座且与顶升齿轮啮合的顶升齿盘;所述丝杆机构包括转动设于底座的螺母座,以及与螺母座螺纹连接的丝杆;所述螺母座的外周或丝杆的外周设有与顶升齿盘啮合的传动齿。本升降装置结构简单,顶升物品时需要的驱动力矩小,并且运行平稳。
一种背负式的AGV搬运车.pdf
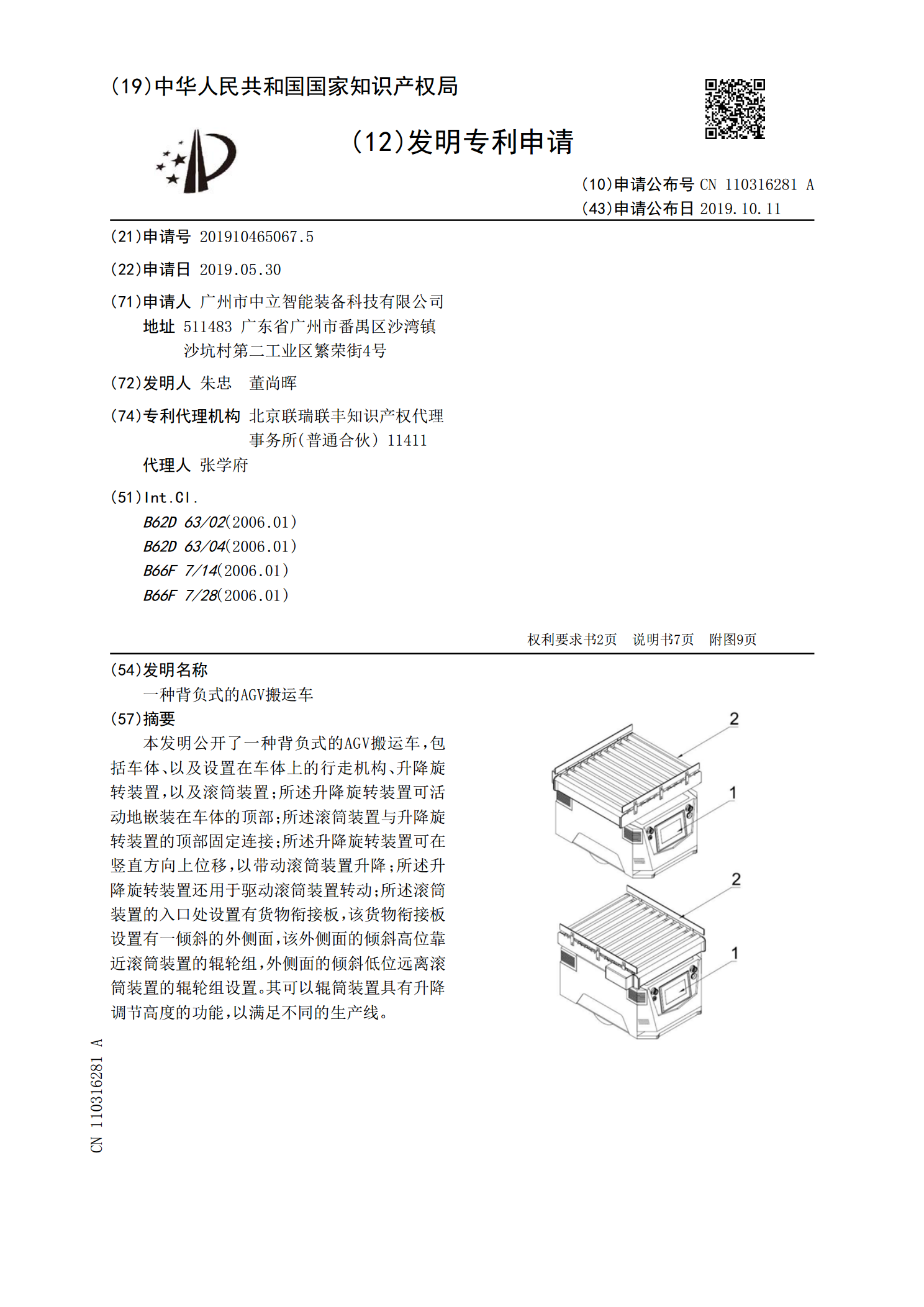
本发明公开了一种背负式的AGV搬运车,包括车体、以及设置在车体上的行走机构、升降旋转装置,以及滚筒装置;所述升降旋转装置可活动地嵌装在车体的顶部;所述滚筒装置与升降旋转装置的顶部固定连接;所述升降旋转装置可在竖直方向上位移,以带动滚筒装置升降;所述升降旋转装置还用于驱动滚筒装置转动;所述滚筒装置的入口处设置有货物衔接板,该货物衔接板设置有一倾斜的外侧面,该外侧面的倾斜高位靠近滚筒装置的辊轮组,外侧面的倾斜低位远离滚筒装置的辊轮组设置。其可以辊筒装置具有升降调节高度的功能,以满足不同的生产线。