
一种基于断面轮廓序列的微观多相结构三维建模测量方法.pdf

一吃****昕靓


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于断面轮廓序列的微观多相结构三维建模测量方法.pdf
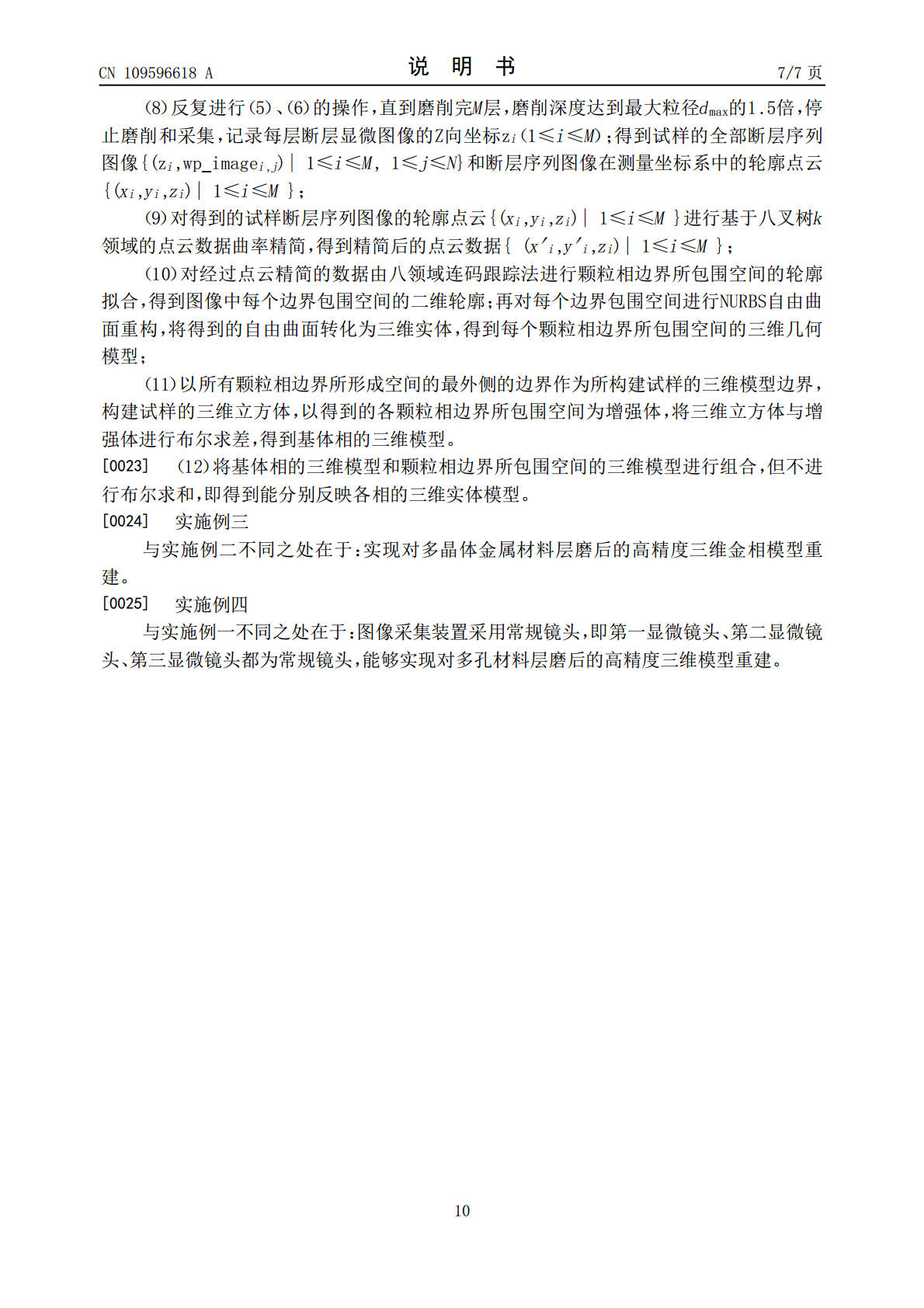
本发明涉及机械工程中的机械制造技术领域和图像测量技术领域,特别涉及三维金相测试领域。一种基于断面轮廓序列的微观多相结构三维建模测量方法,将微观多相结构材料试件做成金相测试的试样通过第一砂轮、第二砂轮、第三砂轮进行试磨削,同时通过第一显微镜头、第二显微镜头、第三显微镜头采集试样上表面图像,用边缘检测、亚像素细分算法确定断层图像中各相边界的轮廓数据,用八领域连码跟踪和NURBS自由曲面重构方法进行各相封闭边界的三维模型重构,通过布尔运算得到各相的三维实体模型。
一种基于断面轮廓序列的微观多相结构三维建模测量装置.pdf
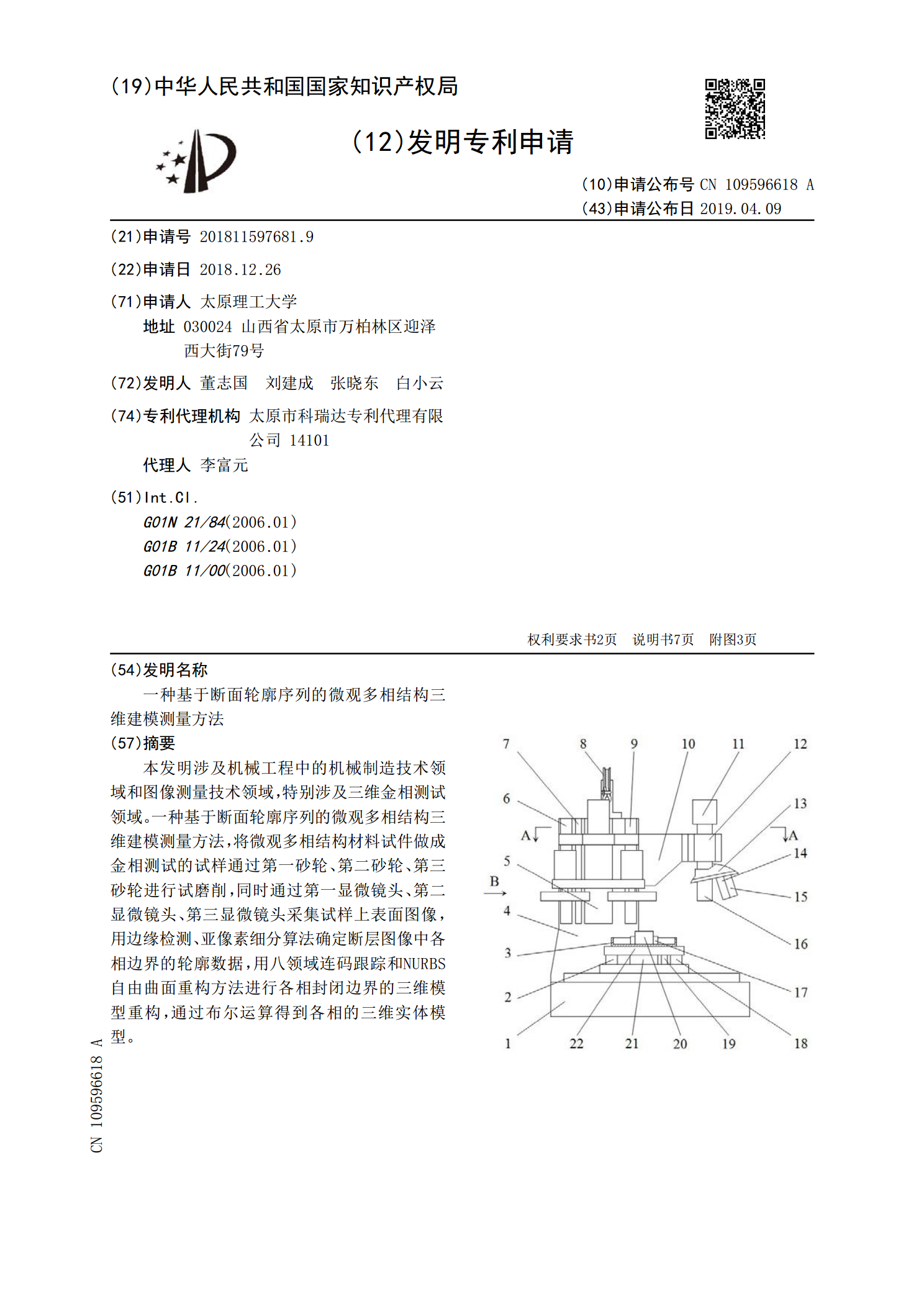
本发明涉及机械工程中的机械制造技术领域和图像测量技术领域,特别涉及三维金相测试领域。一种基于断面轮廓序列的微观多相结构三维建模测量装置,主要由高精度数控三轴移动平台,可转位精密平面磨抛装置,图像采集装置和附件部分组成。本发明能够实现颗粒增强型复合材料、多晶体金属以及多孔型材料等多相材料的三维实体尺寸测量和三维模型重构,为这类多相材料的制备、分析和仿真提供高精度微观多相结构三维模型和测量数据。
一种基于结构光场成像的三维轮廓测量方法.pdf
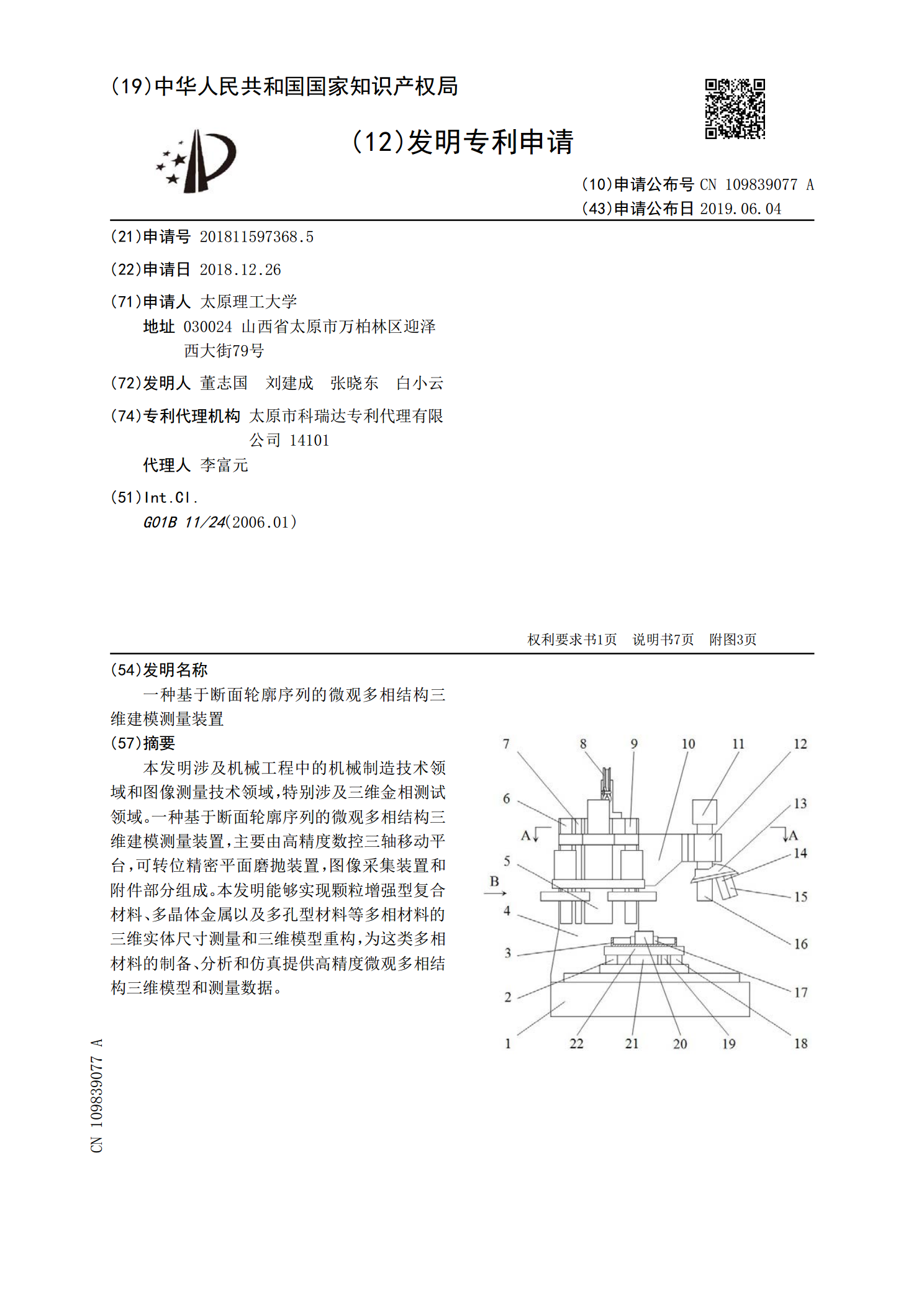
一种基于结构光场成像的三维轮廓测量方法,其特征在于,建立由光场相机与投影仪构成的成像系统,投影仪向被测物体投射原始编码光栅,光场相机拍摄经被测物体轮廓调制后的编码光栅图像,对光场相机所拍摄得到的经被测物体轮廓调制后的编码光栅图像进行解码,根据解码后所得信息对物体轮廓进行三维重建;将三维轮廓测量问题归结为求解含有物点三维坐标三个未知数的三个方程,其中,对成像系统进行标定后,由待测物体成像于光场相机中心子孔径图像的过程确定二个方程,由采用解码后的图像信息确定第三个方程,通过求解上述三个方程构成的方程组,实现三
一种基于结构光照明显微技术的三维轮廓测量方法.pdf
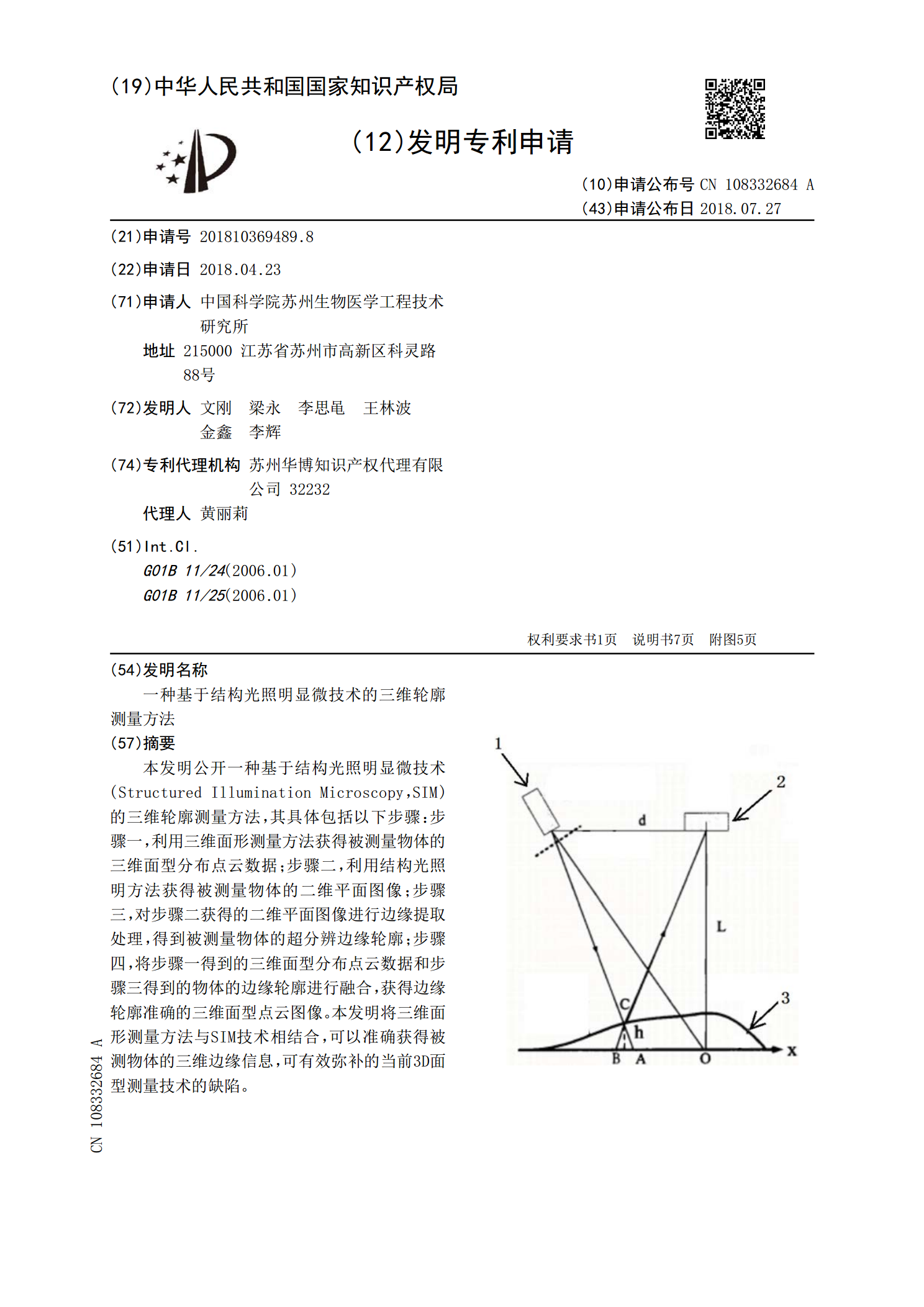
本发明公开一种基于结构光照明显微技术(StructuredIlluminationMicroscopy,SIM)的三维轮廓测量方法,其具体包括以下步骤:步骤一,利用三维面形测量方法获得被测量物体的三维面型分布点云数据;步骤二,利用结构光照明方法获得被测量物体的二维平面图像;步骤三,对步骤二获得的二维平面图像进行边缘提取处理,得到被测量物体的超分辨边缘轮廓;步骤四,将步骤一得到的三维面型分布点云数据和步骤三得到的物体的边缘轮廓进行融合,获得边缘轮廓准确的三维面型点云图像。本发明将三维面形测量方法与SIM
一种用于三维轮廓测量的轮廓测量方法.pdf
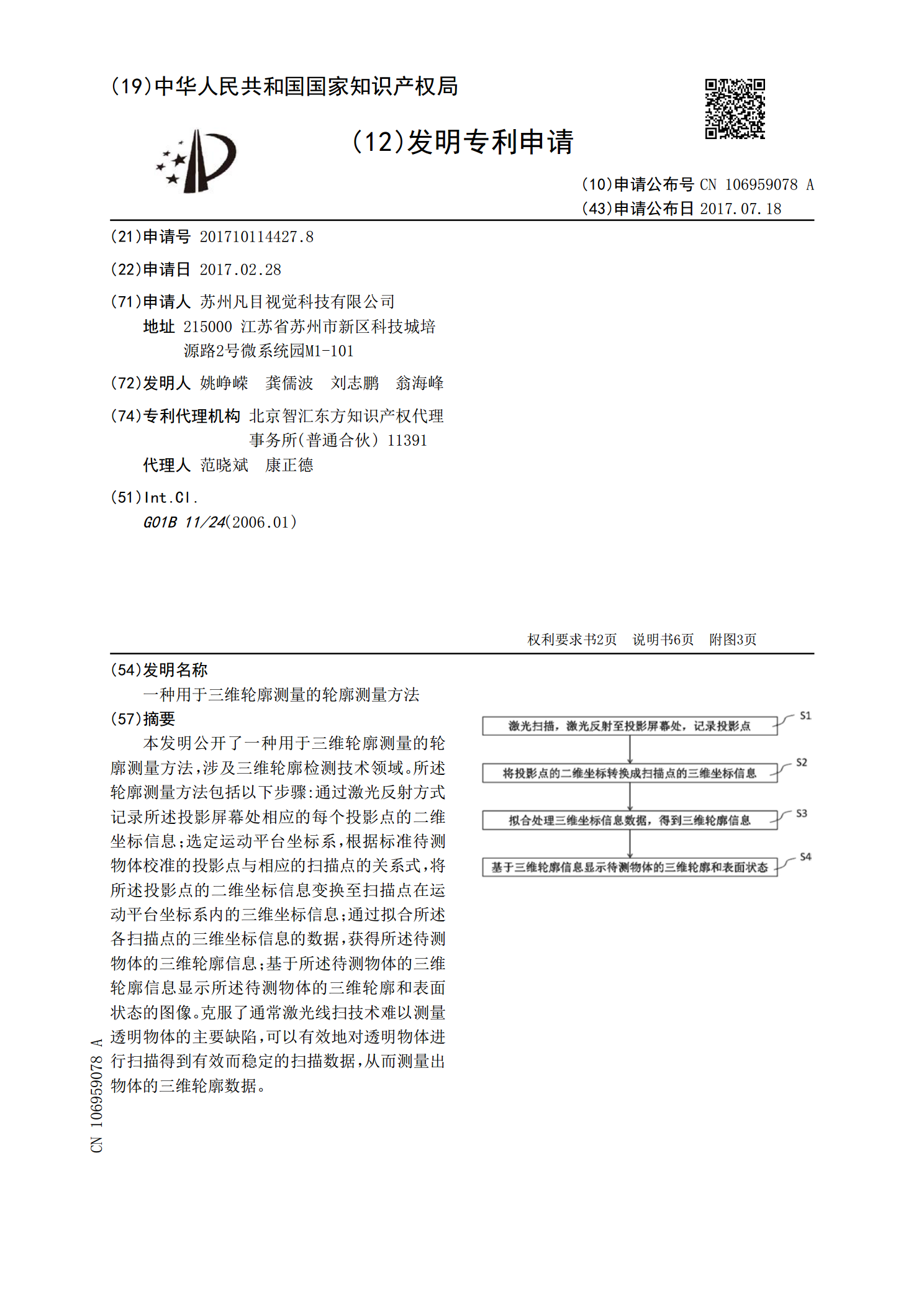
本发明公开了一种用于三维轮廓测量的轮廓测量方法,涉及三维轮廓检测技术领域。所述轮廓测量方法包括以下步骤:通过激光反射方式记录所述投影屏幕处相应的每个投影点的二维坐标信息;选定运动平台坐标系,根据标准待测物体校准的投影点与相应的扫描点的关系式,将所述投影点的二维坐标信息变换至扫描点在运动平台坐标系内的三维坐标信息;通过拟合所述各扫描点的三维坐标信息的数据,获得所述待测物体的三维轮廓信息;基于所述待测物体的三维轮廓信息显示所述待测物体的三维轮廓和表面状态的图像。克服了通常激光线扫技术难以测量透明物体的主要缺陷