
一种用于三维轮廓测量的轮廓测量方法.pdf

是你****辉呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于三维轮廓测量的轮廓测量方法.pdf
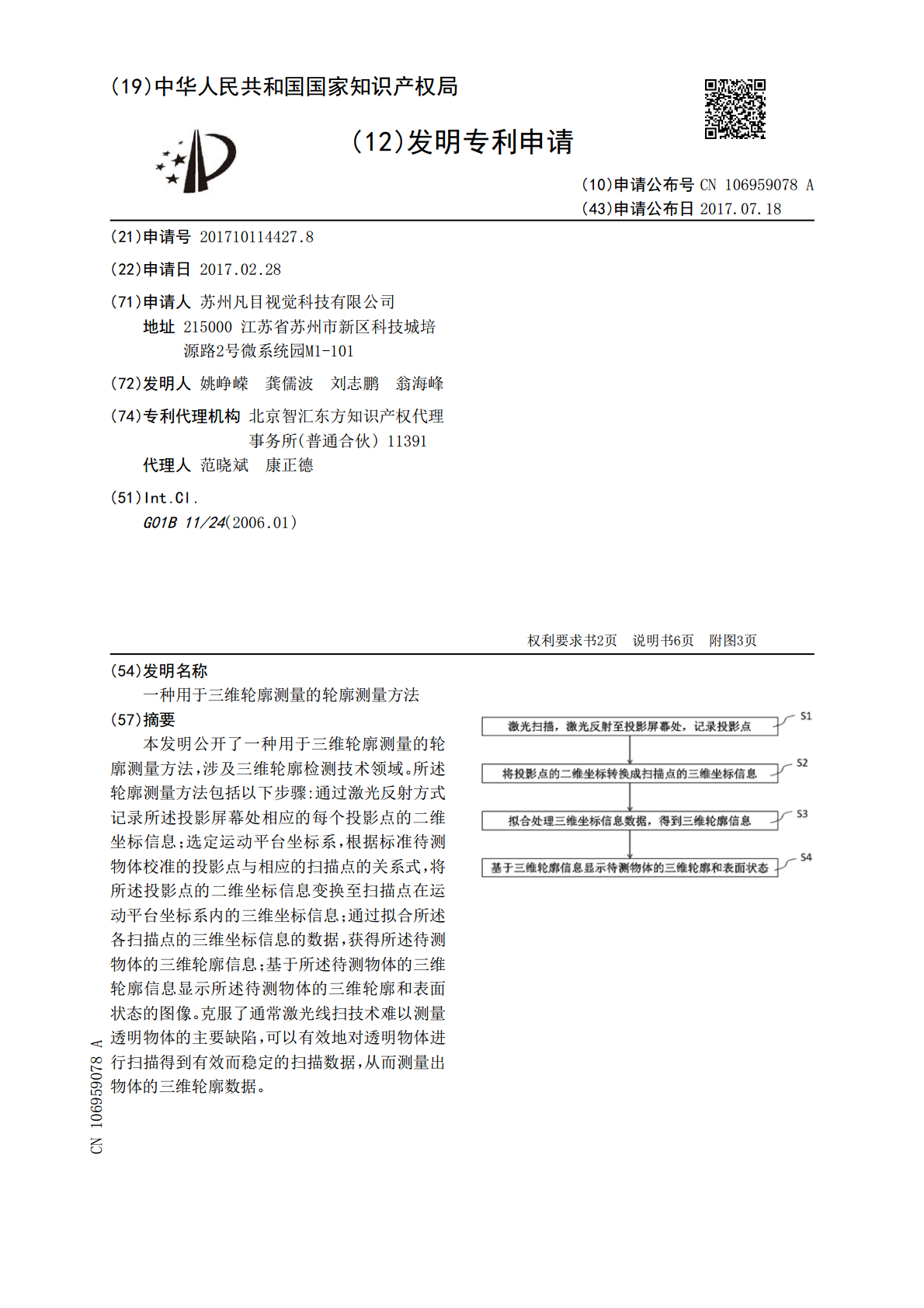
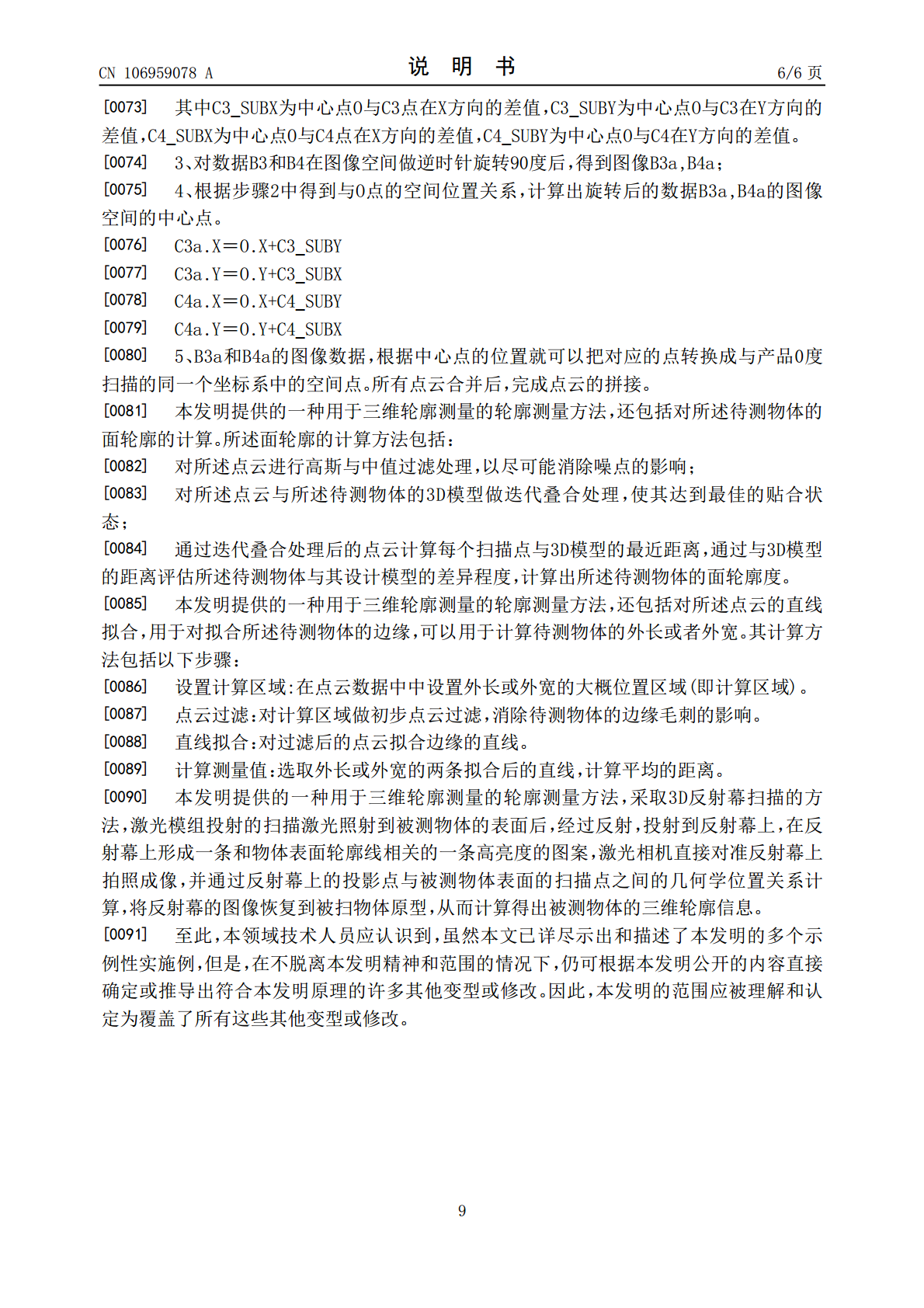
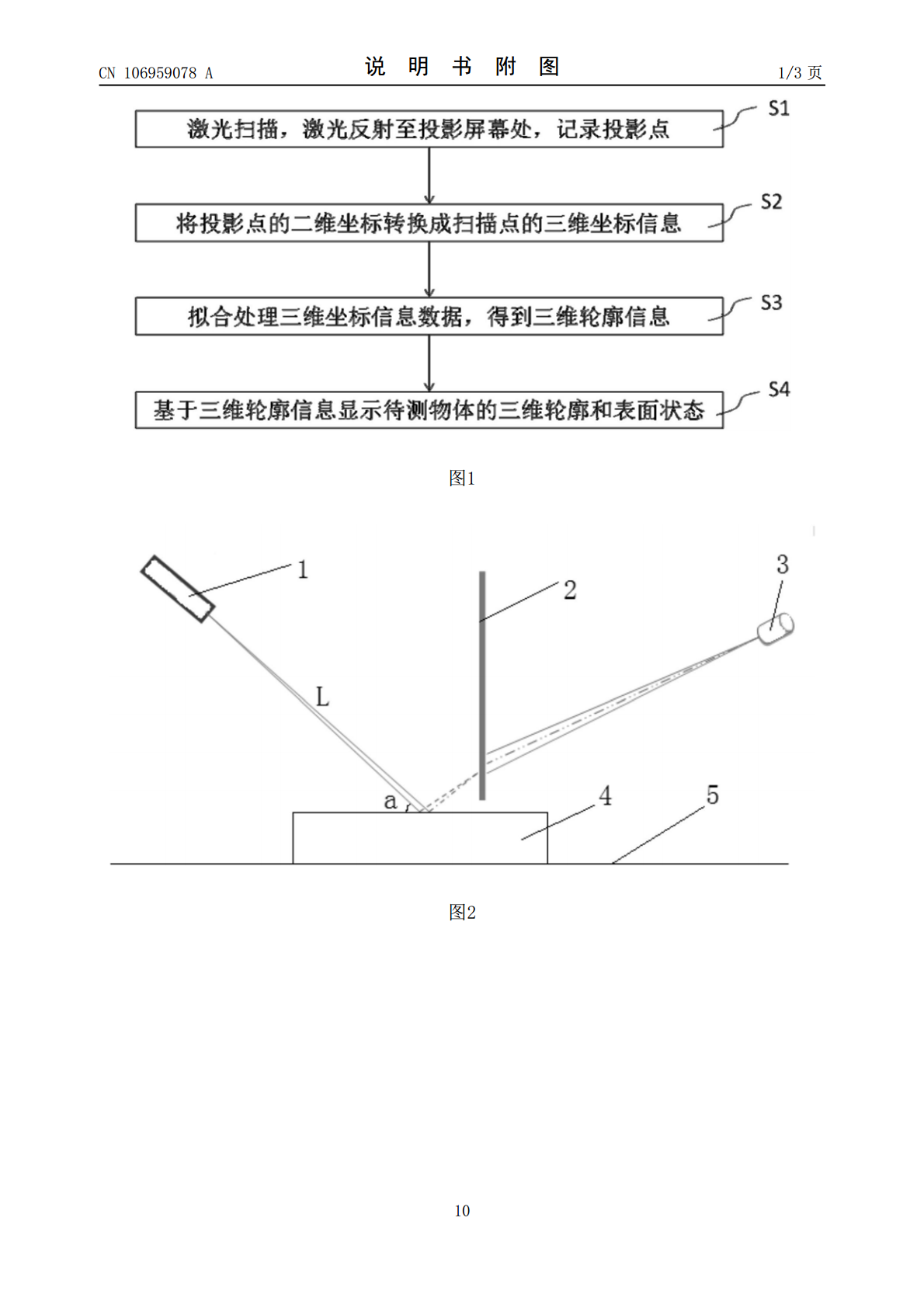
本发明公开了一种用于三维轮廓测量的轮廓测量方法,涉及三维轮廓检测技术领域。所述轮廓测量方法包括以下步骤:通过激光反射方式记录所述投影屏幕处相应的每个投影点的二维坐标信息;选定运动平台坐标系,根据标准待测物体校准的投影点与相应的扫描点的关系式,将所述投影点的二维坐标信息变换至扫描点在运动平台坐标系内的三维坐标信息;通过拟合所述各扫描点的三维坐标信息的数据,获得所述待测物体的三维轮廓信息;基于所述待测物体的三维轮廓信息显示所述待测物体的三维轮廓和表面状态的图像。克服了通常激光线扫技术难以测量透明物体的主要缺陷
一种眼镜镜框三维轮廓的测量方法.pdf
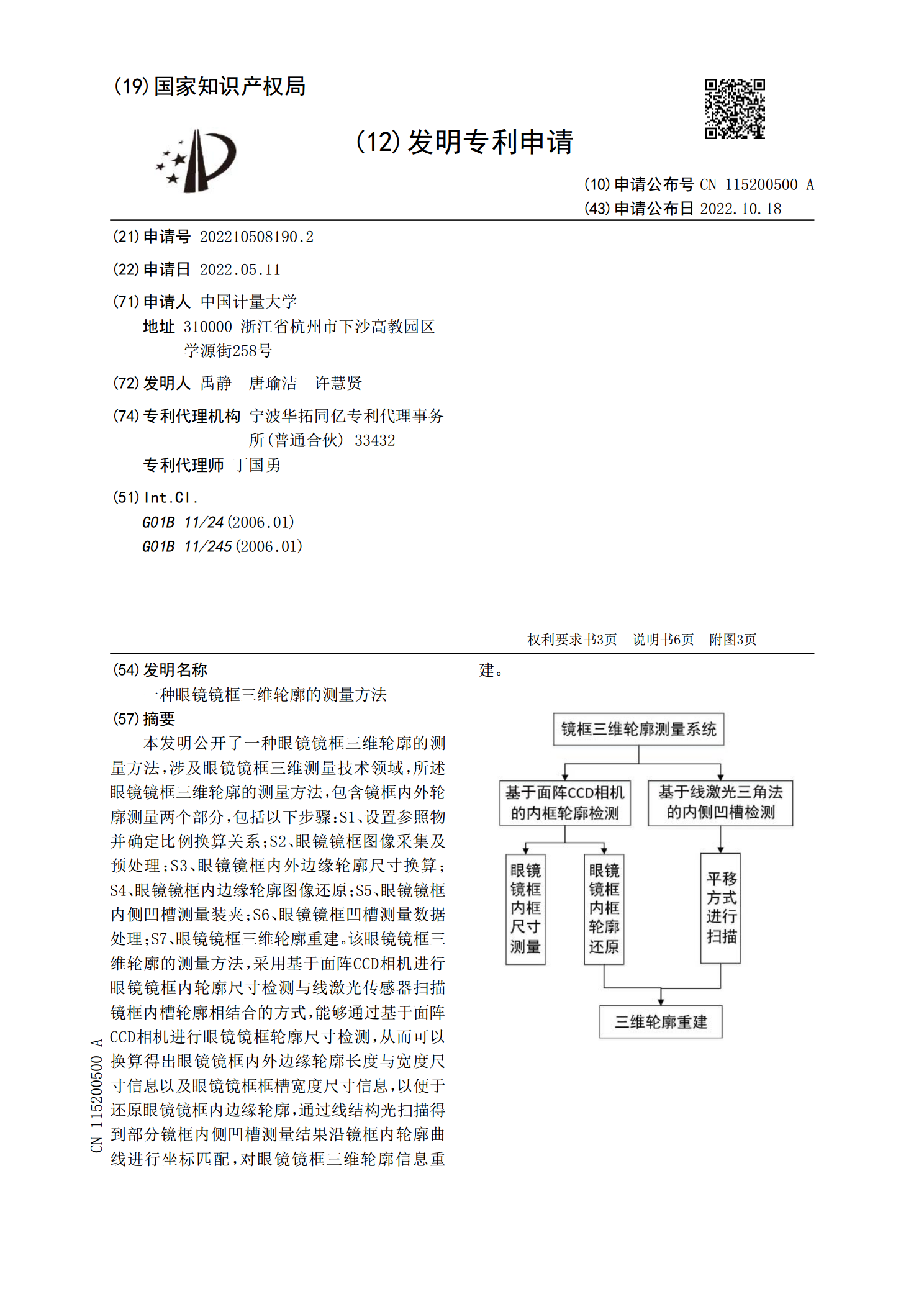
本发明公开了一种眼镜镜框三维轮廓的测量方法,涉及眼镜镜框三维测量技术领域,所述眼镜镜框三维轮廓的测量方法,包含镜框内外轮廓测量两个部分,包括以下步骤:S1、设置参照物并确定比例换算关系;S2、眼镜镜框图像采集及预处理;S3、眼镜镜框内外边缘轮廓尺寸换算;S4、眼镜镜框内边缘轮廓图像还原;S5、眼镜镜框内侧凹槽测量装夹;S6、眼镜镜框凹槽测量数据处理;S7、眼镜镜框三维轮廓重建。该眼镜镜框三维轮廓的测量方法,采用基于面阵CCD相机进行眼镜镜框内轮廓尺寸检测与线激光传感器扫描镜框内槽轮廓相结合的方式,能够通过

彩色物体三维轮廓测量方法.pdf
本发明属于光学测量技术领域,具体涉及一种彩色物体三维轮廓测量方法。本发明首先利用光度计测量出3CCD相机的三通道耦合矩阵,消除物理器件对测量过程的影响,相比于利用投影红、绿、蓝图像至白纸上计算耦合矩阵具有更高的精度;对于彩色物体表面反射率的求取,该方法实质上相当于在物体每一点都投影了三原色,利用互补关系,通过叠加互补色,求取的反射率矩阵K抵消了干扰。较之投射均匀白光求取的反射率K,投影互补彩色条纹的方法能起到更好的结构光条纹补偿效果,补偿后的图像具有更好的正弦性。本方法只需投影四副图像至彩色物体表面就可以

轮廓测量方法.pdf
本发明公开了一种轮廓测量方法,其包括:S1、相机标定;S2、对条纹Mi分别进行相位-高度标定;S3、将M1投影在被测物上,根据相位-高度标定求得各观测点的高度坐标,再根据相机标定求得该各观测点的三维坐标;S4、利用前一步较宽频条纹的测量结果辅助下一步较窄频条纹解包裹获取相位,再利用标定数据,完成一次更为精确的测量;S5、循环执行步骤S4,直至对被测物的轮廓测量达到预定的精度。本发明能够对复杂外形被测物表面轮廓进行大范围且高精度的测量。

一种空间编码的光学三维轮廓测量方法.pdf
一种空间编码的光学三维轮廓测量方法,属于光电测量领域,采用颜色信息条纹对二进制编码条纹进行细分的思想,代替原来二进制编码中的一个条纹。颜色信息易于识别,解决了条纹间距与条纹识别的矛盾。再通过条纹移位多次测量的方式,测取上一步中彩色条纹间隔中的空间点,这样相当于进一步细化了测量间隔,同时移位测量的方式也避免了因投影光刀太密,而产生的条纹识别困难问题。最后,整合几次测量结果,得到物体三维轮廓信息。通过本方法,能够有效解决结构光三维轮廓测量中条纹编码与速度、条纹间距与识别的矛盾,保证在结构光编码测量