
一种智能快递机器人.pdf

努力****星驰


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能快递机器人.pdf
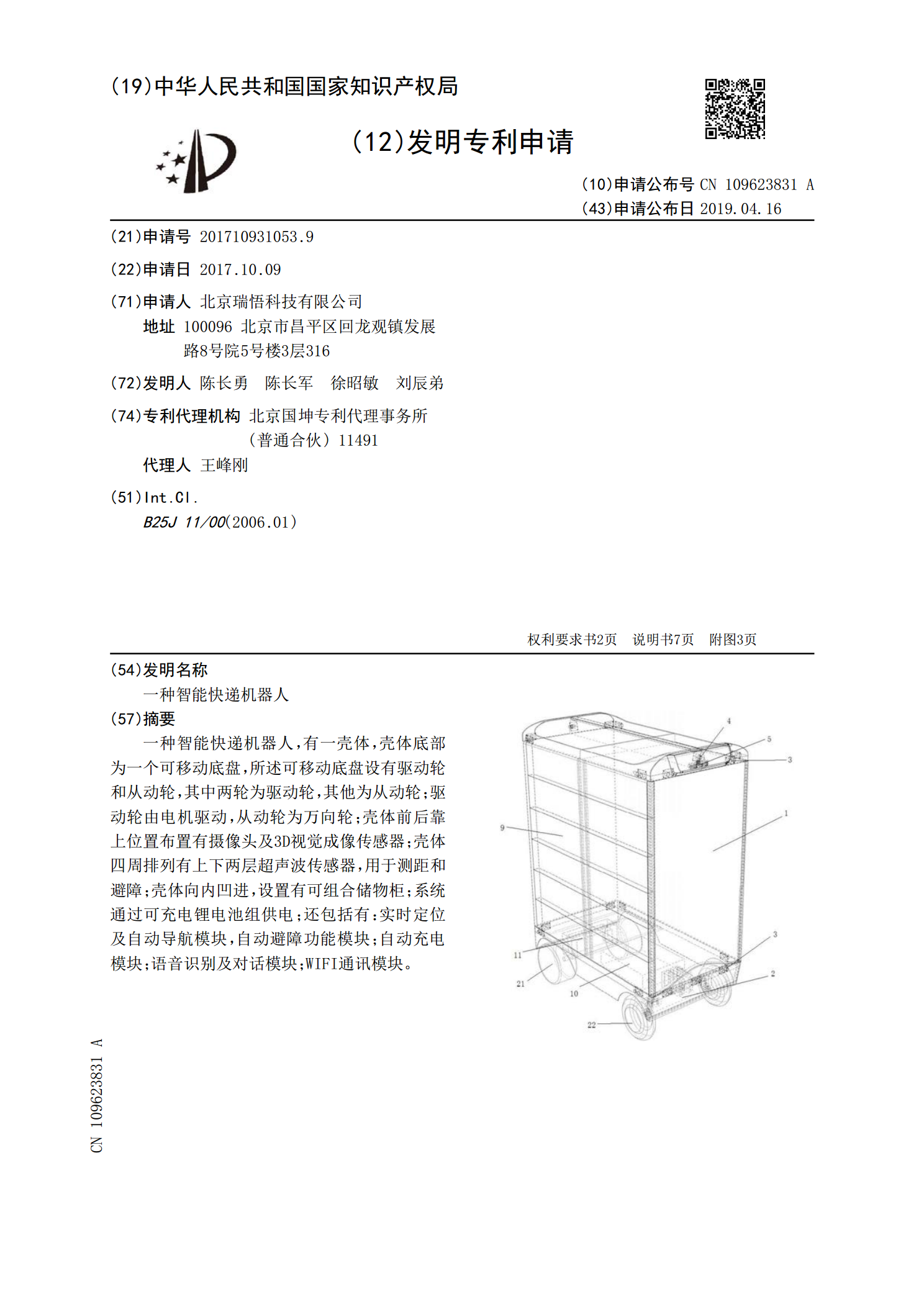
一种智能快递机器人,有一壳体,壳体底部为一个可移动底盘,所述可移动底盘设有驱动轮和从动轮,其中两轮为驱动轮,其他为从动轮;驱动轮由电机驱动,从动轮为万向轮;壳体前后靠上位置布置有摄像头及3D视觉成像传感器;壳体四周排列有上下两层超声波传感器,用于测距和避障;壳体向内凹进,设置有可组合储物柜;系统通过可充电锂电池组供电;还包括有:实时定位及自动导航模块,自动避障功能模块;自动充电模块;语音识别及对话模块;WIFI通讯模块。
一种智能快递取货机器人.pdf
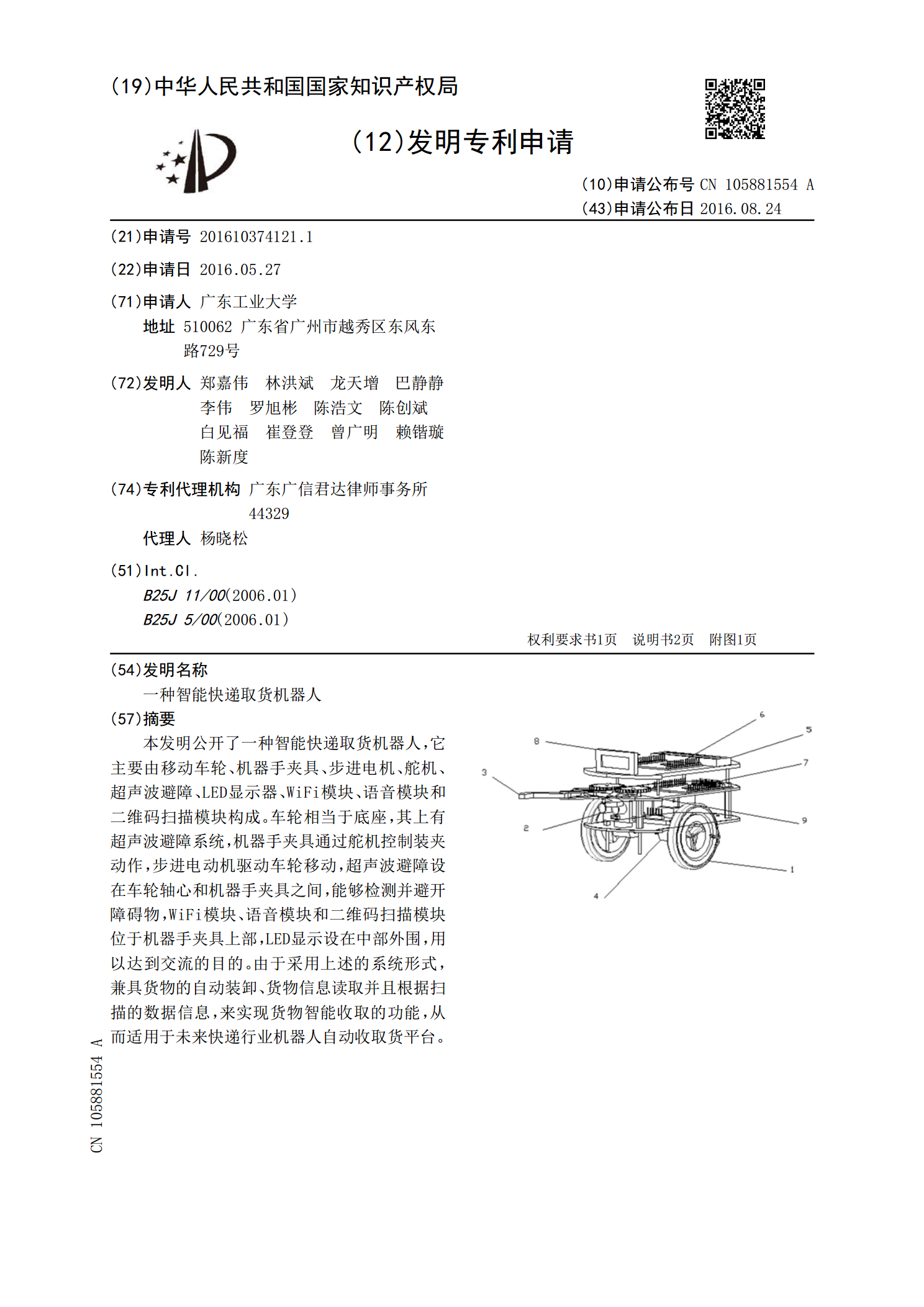
本发明公开了一种智能快递取货机器人,它主要由移动车轮、机器手夹具、步进电机、舵机、超声波避障、LED显示器、WiFi模块、语音模块和二维码扫描模块构成。车轮相当于底座,其上有超声波避障系统,机器手夹具通过舵机控制装夹动作,步进电动机驱动车轮移动,超声波避障设在车轮轴心和机器手夹具之间,能够检测并避开障碍物,WiFi模块、语音模块和二维码扫描模块位于机器手夹具上部,LED显示设在中部外围,用以达到交流的目的。由于采用上述的系统形式,兼具货物的自动装卸、货物信息读取并且根据扫描的数据信息,来实现货物智能收取的
一种市内智能送快递机器人.pdf
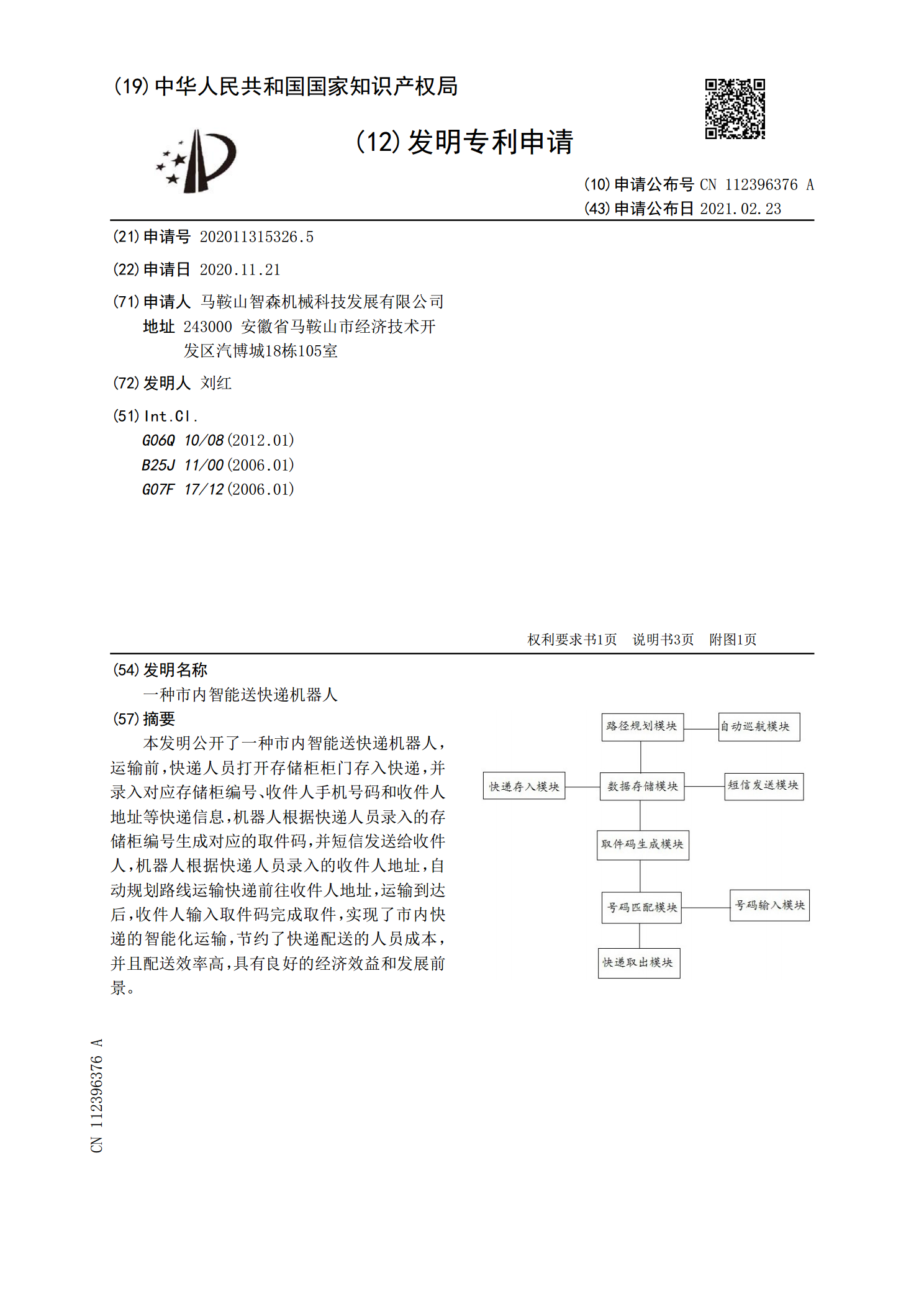
本发明公开了一种市内智能送快递机器人,运输前,快递人员打开存储柜柜门存入快递,并录入对应存储柜编号、收件人手机号码和收件人地址等快递信息,机器人根据快递人员录入的存储柜编号生成对应的取件码,并短信发送给收件人,机器人根据快递人员录入的收件人地址,自动规划路线运输快递前往收件人地址,运输到达后,收件人输入取件码完成取件,实现了市内快递的智能化运输,节约了快递配送的人员成本,并且配送效率高,具有良好的经济效益和发展前景。
一种智能快递派送机器人.pdf
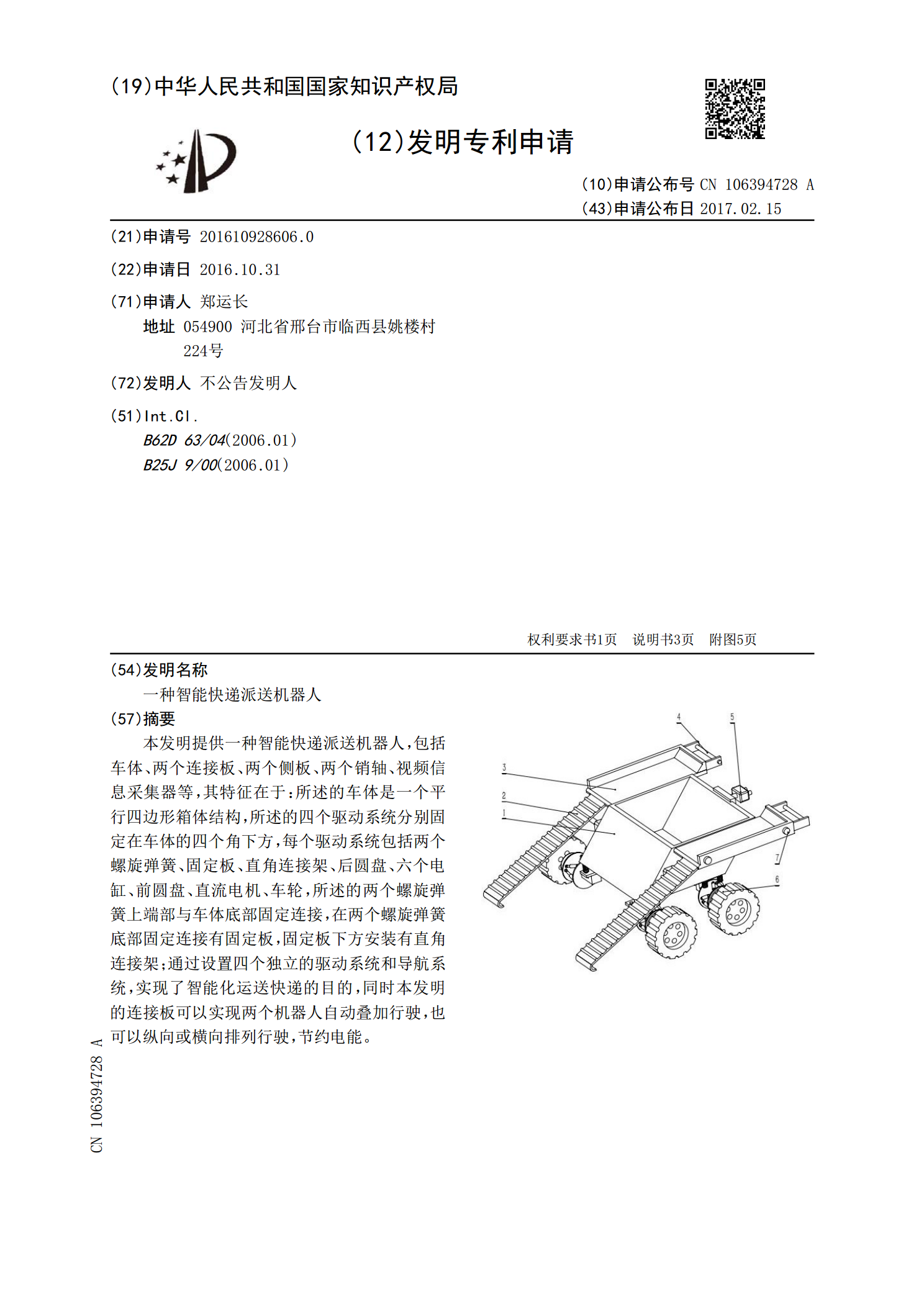
本发明提供一种智能快递派送机器人,包括车体、两个连接板、两个侧板、两个销轴、视频信息采集器等,其特征在于:所述的车体是一个平行四边形箱体结构,所述的四个驱动系统分别固定在车体的四个角下方,每个驱动系统包括两个螺旋弹簧、固定板、直角连接架、后圆盘、六个电缸、前圆盘、直流电机、车轮,所述的两个螺旋弹簧上端部与车体底部固定连接,在两个螺旋弹簧底部固定连接有固定板,固定板下方安装有直角连接架;通过设置四个独立的驱动系统和导航系统,实现了智能化运送快递的目的,同时本发明的连接板可以实现两个机器人自动叠加行驶,也可以

《未来社区智能快递机器人》.docx
《未来社区智能快递机器人》《未来社区智能快递机器人》课程的总目标是培养学生的科学素养和解决真实问题的综合能力,激发创新潜能,为他们继续学习、可持续发展、成为具有社会责任感的合格公民打下坚实的根基。学生通过本课程的学习,保持和发展对机器人的好奇心和探究热情;了解当今机器人发展现状,以及快递业务遇到的难题;根据需要完善的社会情况,。科学概念(一)结构科学概念1、初步认识齿轮组的不同搭配能改变电机的转速。2、初步认识机械手所运用的物理结构。(二)编程科学概念初步了解角度传感器、颜色传感器、触动传感器、超声波传感