
一种用于绳索驱动上肢康复训练器的左右手互换机构.pdf

明钰****甜甜

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于绳索驱动上肢康复训练器的左右手互换机构.pdf
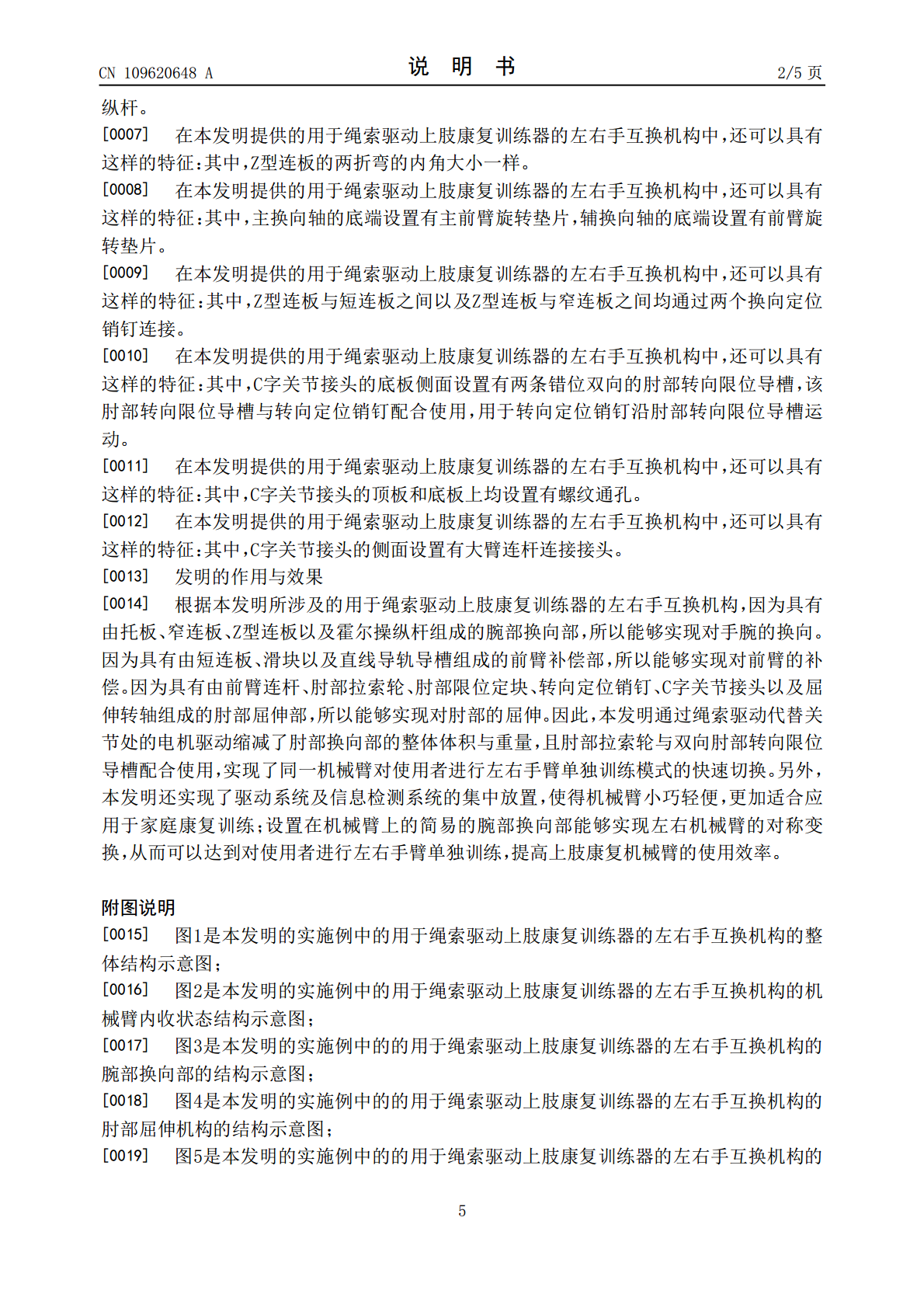
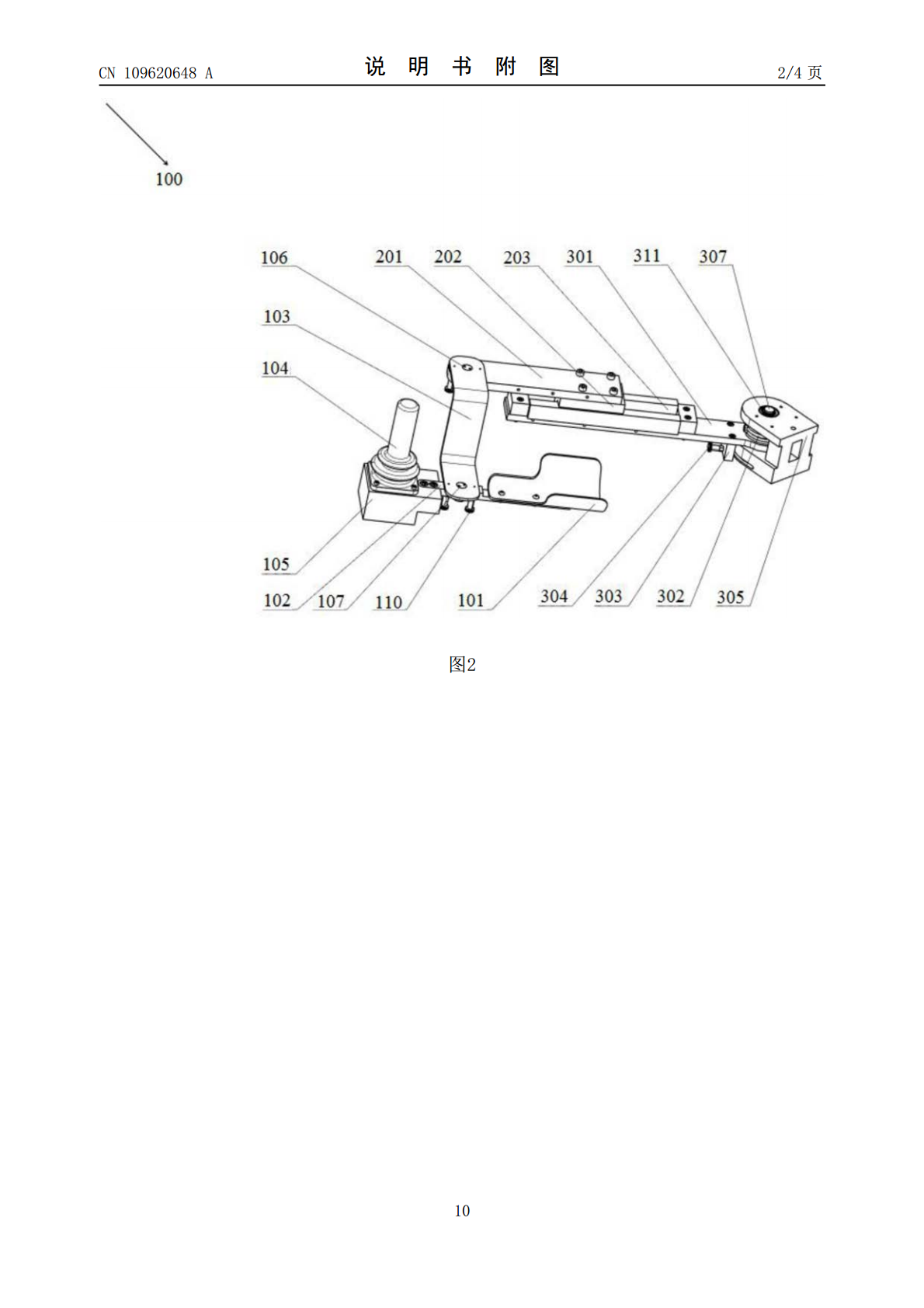
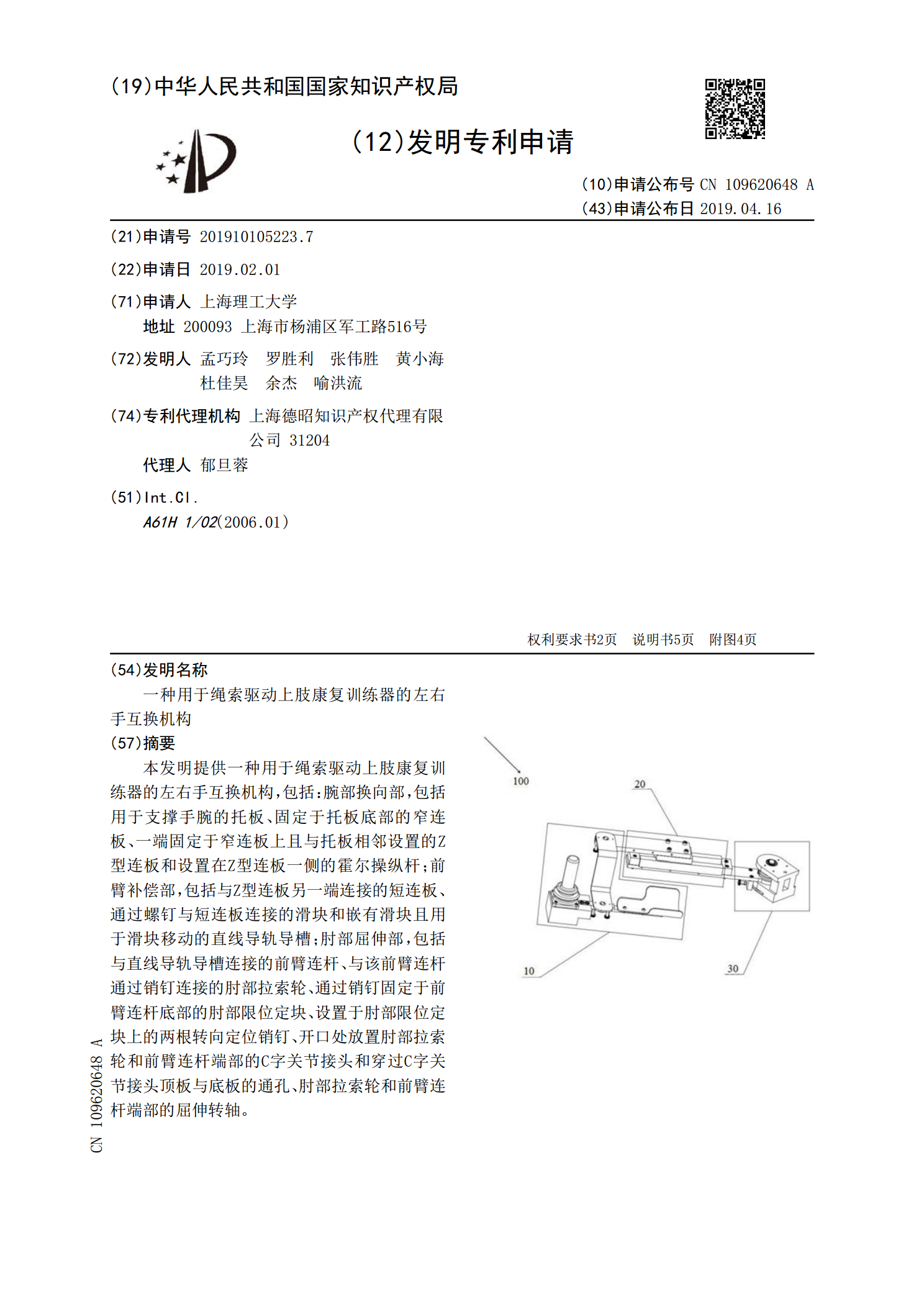
本发明提供一种用于绳索驱动上肢康复训练器的左右手互换机构,包括:腕部换向部,包括用于支撑手腕的托板、固定于托板底部的窄连板、一端固定于窄连板上且与托板相邻设置的Z型连板和设置在Z型连板一侧的霍尔操纵杆;前臂补偿部,包括与Z型连板另一端连接的短连板、通过螺钉与短连板连接的滑块和嵌有滑块且用于滑块移动的直线导轨导槽;肘部屈伸部,包括与直线导轨导槽连接的前臂连杆、与该前臂连杆通过销钉连接的肘部拉索轮、通过销钉固定于前臂连杆底部的肘部限位定块、设置于肘部限位定块上的两根转向定位销钉、开口处放置肘部拉索轮和前臂连杆
一种用于上肢康复训练器的前臂内/外旋机构.pdf
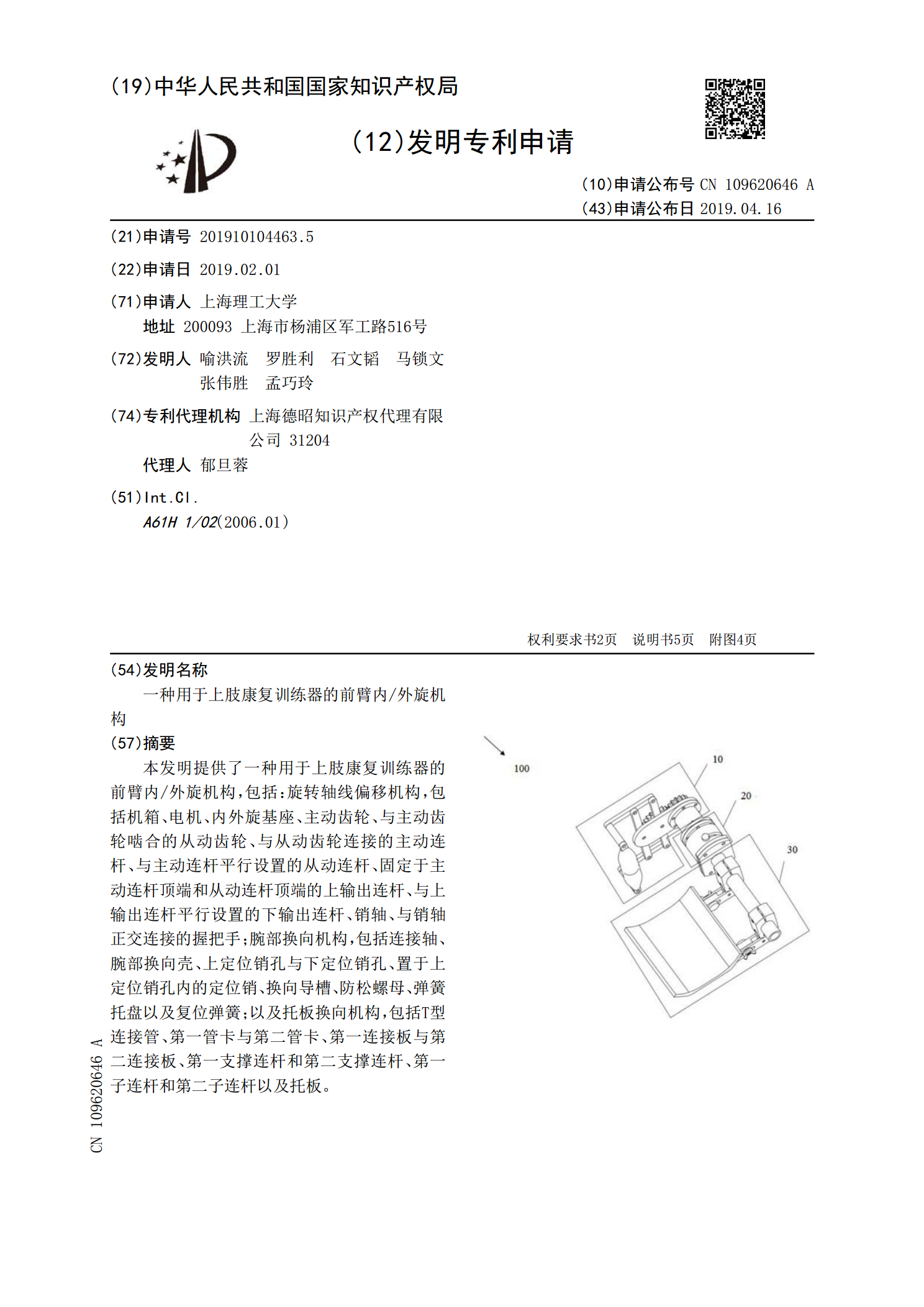
本发明提供了一种用于上肢康复训练器的前臂内/外旋机构,包括:旋转轴线偏移机构,包括机箱、电机、内外旋基座、主动齿轮、与主动齿轮啮合的从动齿轮、与从动齿轮连接的主动连杆、与主动连杆平行设置的从动连杆、固定于主动连杆顶端和从动连杆顶端的上输出连杆、与上输出连杆平行设置的下输出连杆、销轴、与销轴正交连接的握把手;腕部换向机构,包括连接轴、腕部换向壳、上定位销孔与下定位销孔、置于上定位销孔内的定位销、换向导槽、防松螺母、弹簧托盘以及复位弹簧;以及托板换向机构,包括T型连接管、第一管卡与第二管卡、第一连接板与第二连
一种基于绳索驱动的上肢康复机器人.pdf
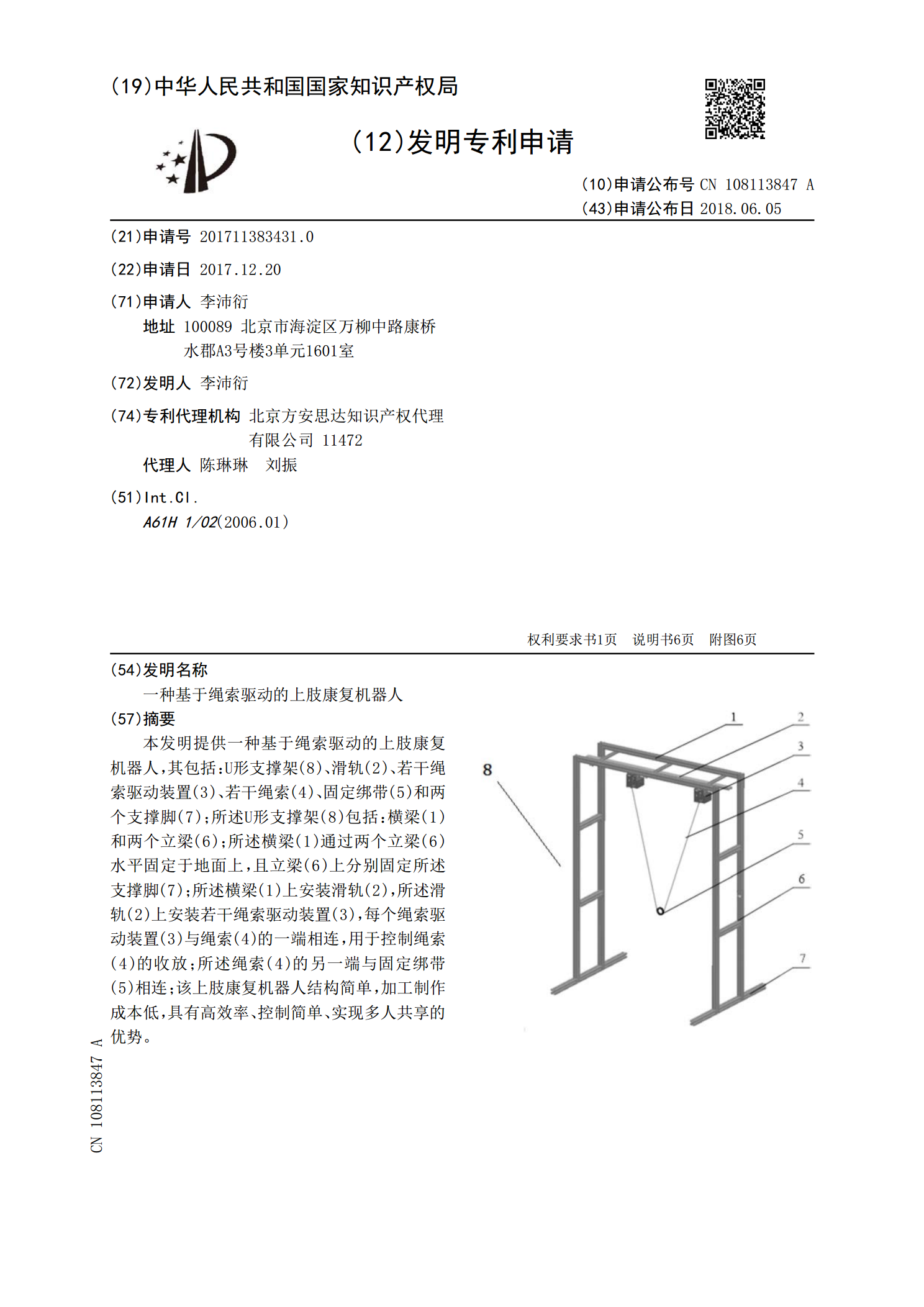
本发明提供一种基于绳索驱动的上肢康复机器人,其包括:U形支撑架(8)、滑轨(2)、若干绳索驱动装置(3)、若干绳索(4)、固定绑带(5)和两个支撑脚(7);所述U形支撑架(8)包括:横梁(1)和两个立梁(6);所述横梁(1)通过两个立梁(6)水平固定于地面上,且立梁(6)上分别固定所述支撑脚(7);所述横梁(1)上安装滑轨(2),所述滑轨(2)上安装若干绳索驱动装置(3),每个绳索驱动装置(3)与绳索(4)的一端相连,用于控制绳索(4)的收放;所述绳索(4)的另一端与固定绑带(5)相连;该上肢康复机器人结
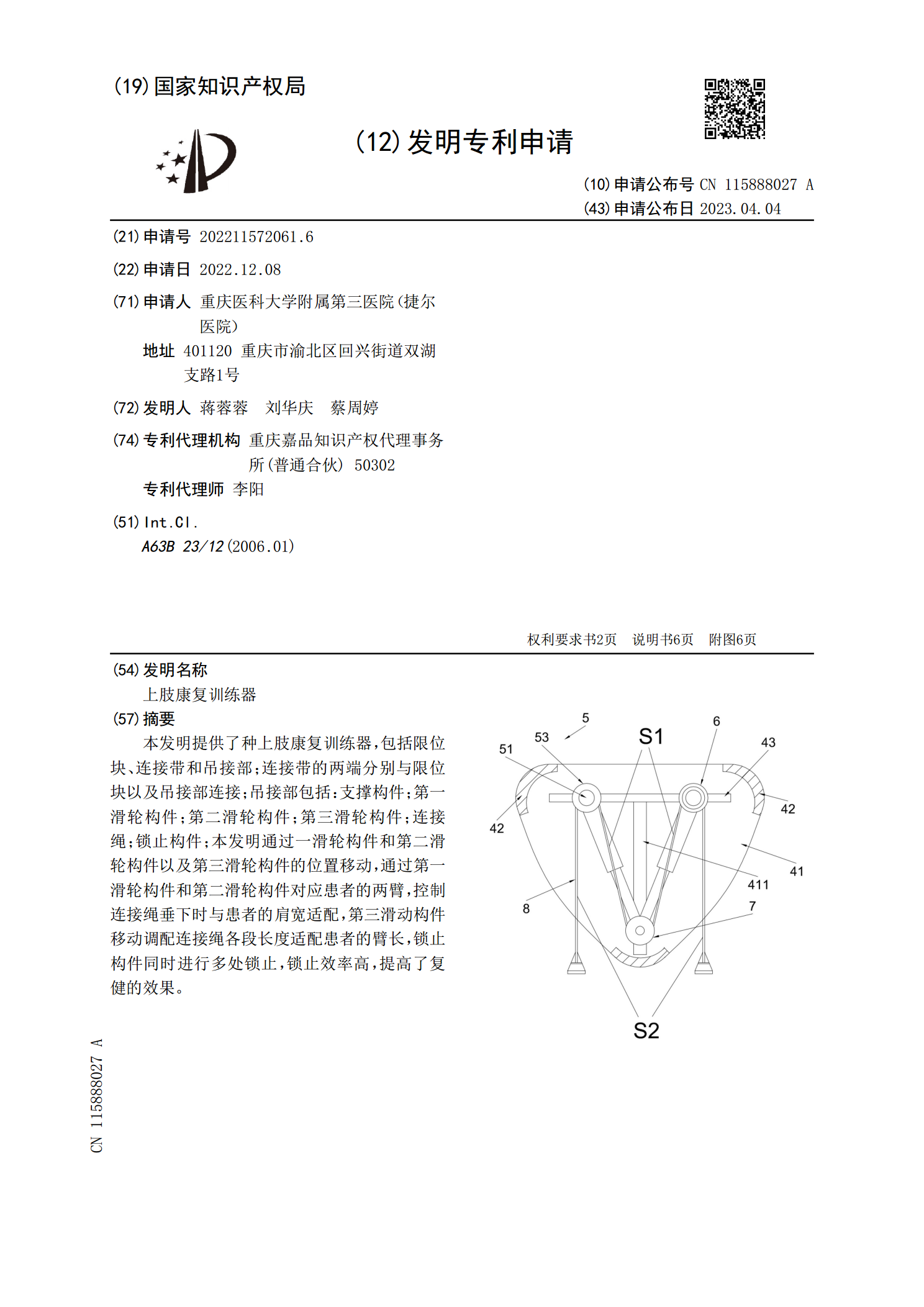
上肢康复训练器.pdf
本发明提供了种上肢康复训练器,包括限位块、连接带和吊接部;连接带的两端分别与限位块以及吊接部连接;吊接部包括:支撑构件;第一滑轮构件;第二滑轮构件;第三滑轮构件;连接绳;锁止构件;本发明通过一滑轮构件和第二滑轮构件以及第三滑轮构件的位置移动,通过第一滑轮构件和第二滑轮构件对应患者的两臂,控制连接绳垂下时与患者的肩宽适配,第三滑动构件移动调配连接绳各段长度适配患者的臂长,锁止构件同时进行多处锁止,锁止效率高,提高了复健的效果。
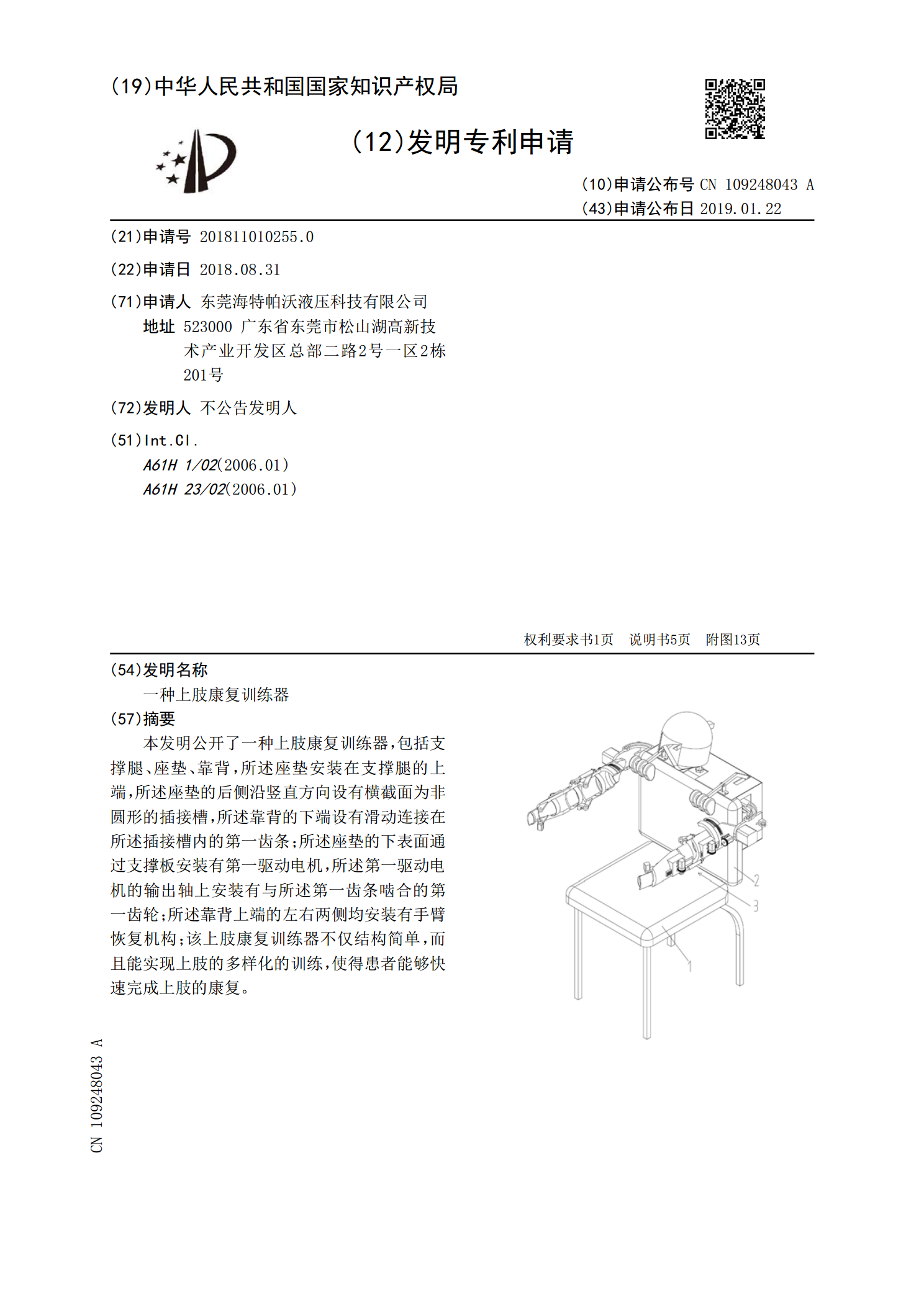
一种上肢康复训练器.pdf
本发明公开了一种上肢康复训练器,包括支撑腿、座垫、靠背,所述座垫安装在支撑腿的上端,所述座垫的后侧沿竖直方向设有横截面为非圆形的插接槽,所述靠背的下端设有滑动连接在所述插接槽内的第一齿条;所述座垫的下表面通过支撑板安装有第一驱动电机,所述第一驱动电机的输出轴上安装有与所述第一齿条啮合的第一齿轮;所述靠背上端的左右两侧均安装有手臂恢复机构;该上肢康复训练器不仅结构简单,而且能实现上肢的多样化的训练,使得患者能够快速完成上肢的康复。