
一种仿真物流搬运车.pdf

玄静****写意

1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仿真物流搬运车.pdf
本发明涉及物流系统仿真领域,为了方便新员工或学员快速掌握物料搬运过程中的搬运作业、物料换位和装卸作业,本发明提供了一种仿真物流搬运车,搬运车放置在由有色涂料或贴纸形成的路径线上,搬运车包括设有物料座的底盘、四个驱动轮以及直流减速电机;物料台上设有多个用于对物料座定位的卡槽,卡槽呈直线排列且卡槽的数量大于物料座的数量;物料座一侧连有水平设置的铁片;底盘上设有循迹装置、用于在搬运车上完成物料换位作业的置换装置、用于装卸物料的装卸装置,以及与循迹装置信号连接、与置换装置、装卸装置和四个直流减速电机控制连接的控制
一种物流搬运车.pdf
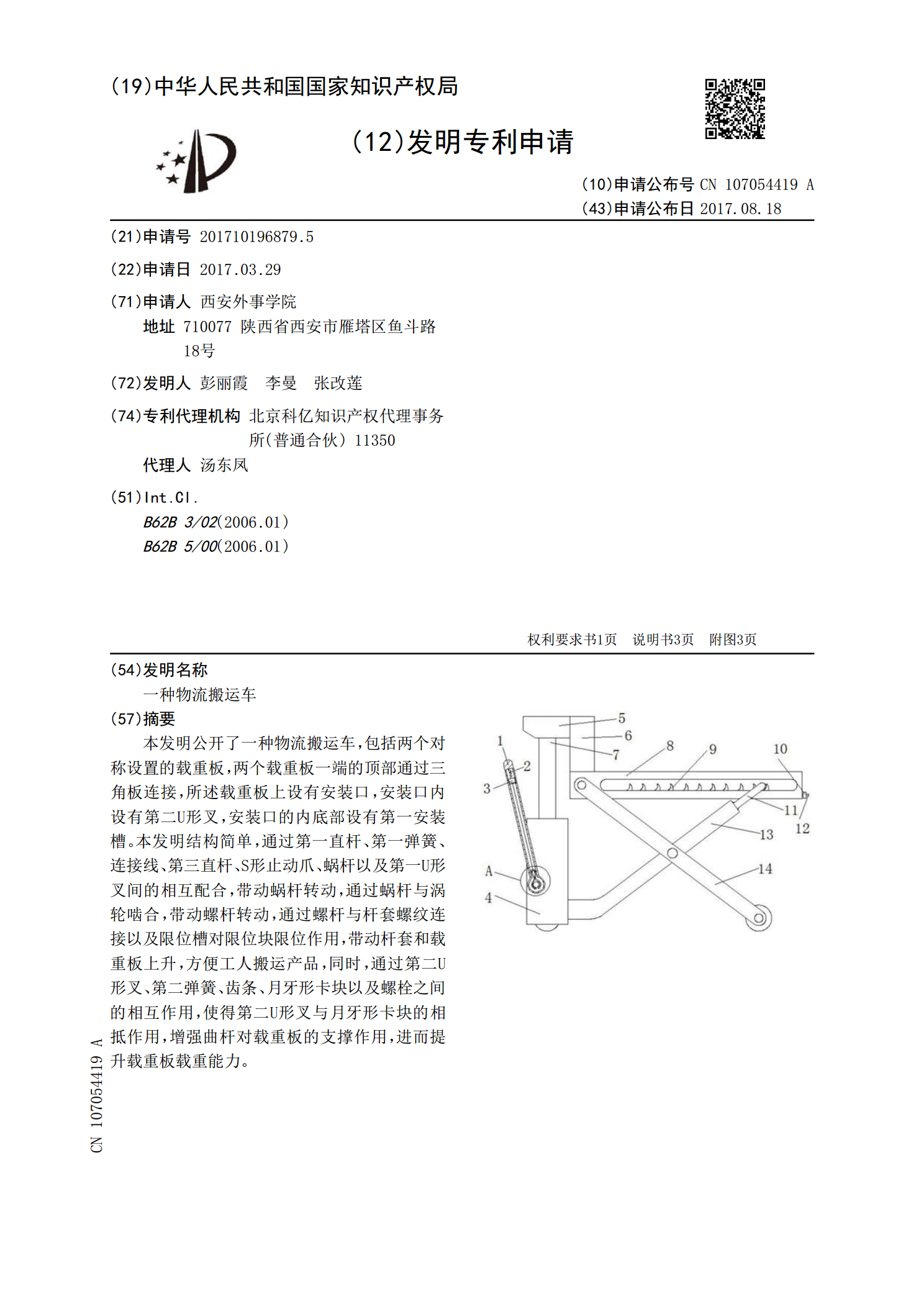
本发明公开了一种物流搬运车,包括两个对称设置的载重板,两个载重板一端的顶部通过三角板连接,所述载重板上设有安装口,安装口内设有第二U形叉,安装口的内底部设有第一安装槽。本发明结构简单,通过第一直杆、第一弹簧、连接线、第三直杆、S形止动爪、蜗杆以及第一U形叉间的相互配合,带动蜗杆转动,通过蜗杆与涡轮啮合,带动螺杆转动,通过螺杆与杆套螺纹连接以及限位槽对限位块限位作用,带动杆套和载重板上升,方便工人搬运产品,同时,通过第二U形叉、第二弹簧、齿条、月牙形卡块以及螺栓之间的相互作用,使得第二U形叉与月牙形卡块的相

一种物流搬运车.pdf
本发明公开一种物流搬运车,包括有车体,在所述车体上表面设有安装座,在所述安装座上转动安装有转轴,在所述转轴上转动安装有支撑板,在所述支撑板上均布排列有多个滚轮,在所述支撑板上表面的四个处均设有竖向设置的导向柱,在所述支撑板上方设有载物板,所述载物板活动设置在导向柱上,在所述载物板上表面贯通设有多个通孔,所述滚轮活动设置在通孔内,在所述安装座上设有能将支撑板锁定从而使支撑板保持水平状态的第一锁定机构,在所述安装座上设有能将转轴锁定的第二锁定机构,在所述转轴上设有能将载物板撑起从而使载物板高于滚轮的撑块,在所

一种物流室内搬运车.pdf
本发明公开了一种物流室内搬运车,属于物流领域,包括底板,底板底面安装有从动滚轮和动力滚轮,动力滚轮均连接有动力电机;底板的上方设有工作面板,底板与工作面板之间连接有剪叉;剪叉包括两个叉臂,叉臂的上端、下端均铰接有滑座,底板、工作面板上均设有滑槽;底板上安装有左右旋双向传动丝杆以及两个丝母,两个丝母分别与两个叉臂下端的滑座连接;底板的后端安装有手柄,手柄上设有控制器,控制器与动力电机、升降电机电连接。本发明结构设计合理,使用方便,能够有效的防止货物升降过程中对搬运车造成的不利影响,防止倾倒。

一种物流运输搬运车.pdf
本发明涉及搬运车,具体是指一种物流运输搬运车,包括两个转动连接的架体、拉动部分,所述架体在远离两个架体的转动连接处的一侧设有长条杆,所述长条杆上设有长条凹槽,所述长条杆上设有空心管,所述空心管上设有长条缺口,所述长条杆上设有U型板,所述拉动部分由拉动杆、中部管、滑杆和丝杆组成,所述滑杆的一端和拉动杆固定连接,所述滑杆穿过中部管之后延伸至空心管内,所述滑杆的末端设有凸起块,所述丝杆的一端和中部管固定连接,所述丝杆依次穿过长条杆和U型板,所述空心管上设有万向轮,由两个架体组成,任何一个架体均可以作为拖车使用,