
用于控制或调节车辆的驾驶员辅助系统的方法和驾驶员辅助系统.pdf

一只****呀9

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制或调节车辆的驾驶员辅助系统的方法和驾驶员辅助系统.pdf
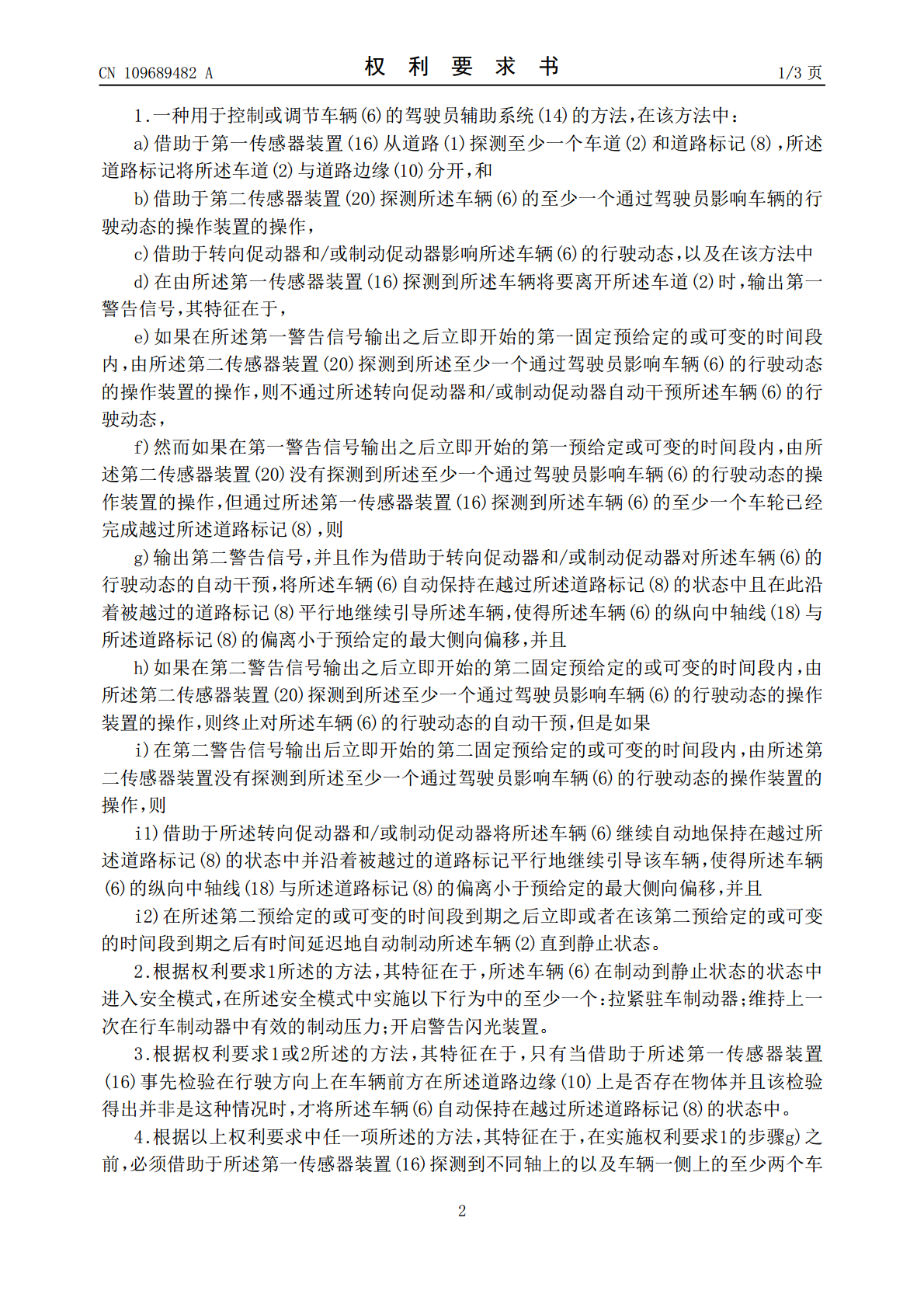
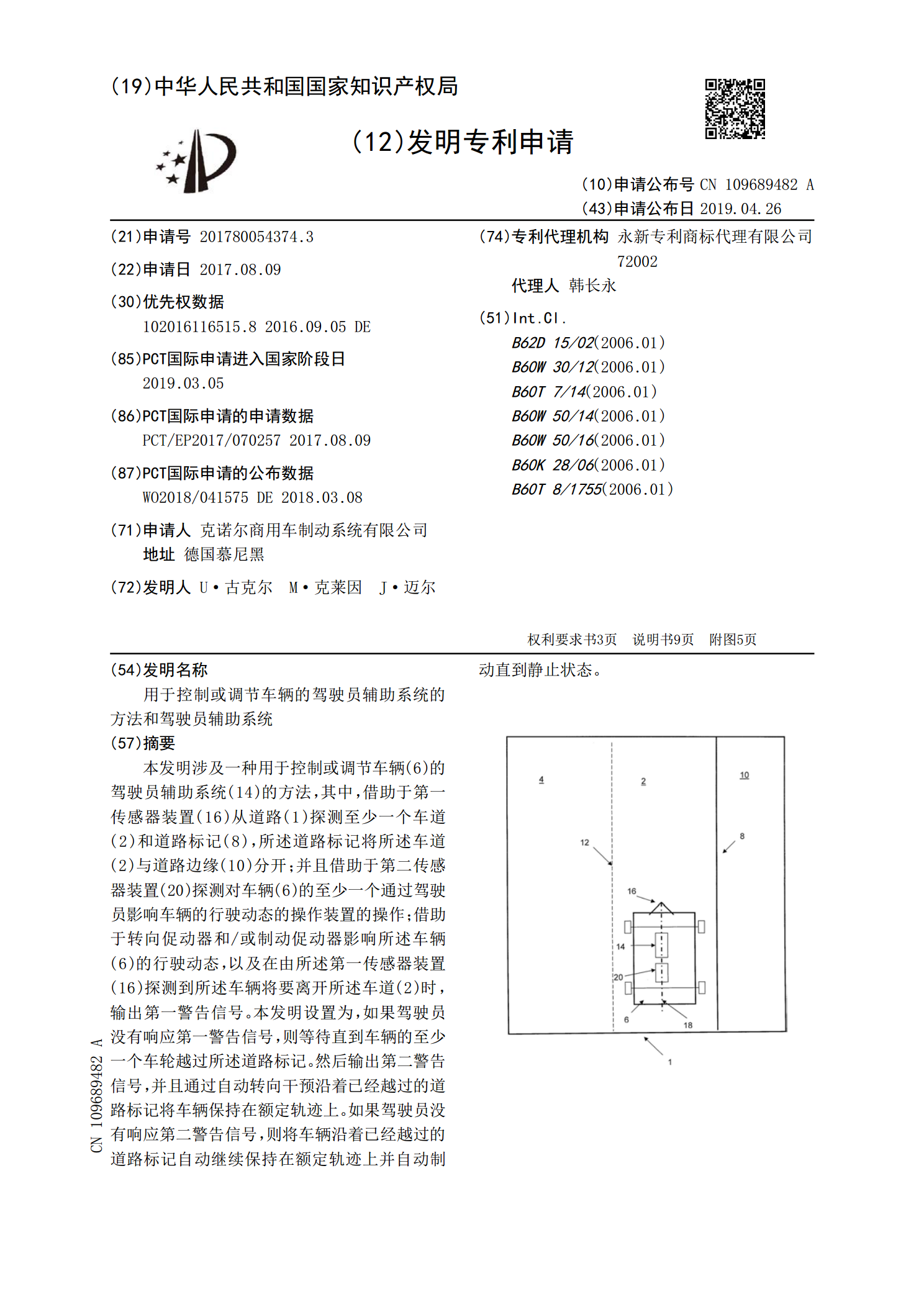
本发明涉及一种用于控制或调节车辆(6)的驾驶员辅助系统(14)的方法,其中,借助于第一传感器装置(16)从道路(1)探测至少一个车道(2)和道路标记(8),所述道路标记将所述车道(2)与道路边缘(10)分开;并且借助于第二传感器装置(20)探测对车辆(6)的至少一个通过驾驶员影响车辆的行驶动态的操作装置的操作;借助于转向促动器和/或制动促动器影响所述车辆(6)的行驶动态,以及在由所述第一传感器装置(16)探测到所述车辆将要离开所述车道(2)时,输出第一警告信号。本发明设置为,如果驾驶员没有响应第一警告信号
用于运行驾驶员辅助系统的方法和设备、驾驶员辅助系统.pdf
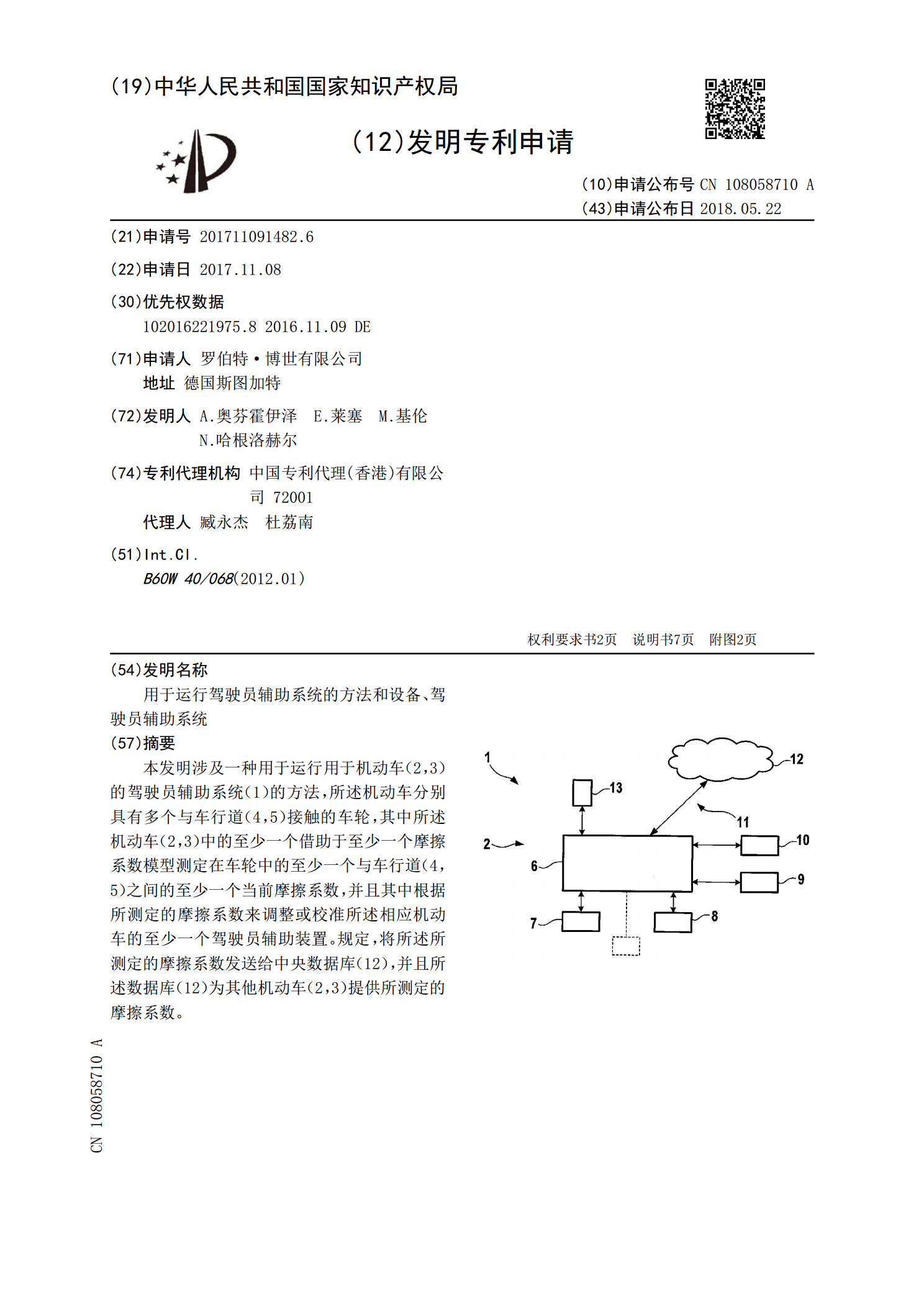
本发明涉及一种用于运行用于机动车(2,3)的驾驶员辅助系统(1)的方法,所述机动车分别具有多个与车行道(4,5)接触的车轮,其中所述机动车(2,3)中的至少一个借助于至少一个摩擦系数模型测定在车轮中的至少一个与车行道(4,5)之间的至少一个当前摩擦系数,并且其中根据所测定的摩擦系数来调整或校准所述相应机动车的至少一个驾驶员辅助装置。规定,将所述所测定的摩擦系数发送给中央数据库(12),并且所述数据库(12)为其他机动车(2,3)提供所测定的摩擦系数。
用于运行驾驶员辅助系统的方法和设备、驾驶员辅助系统.pdf
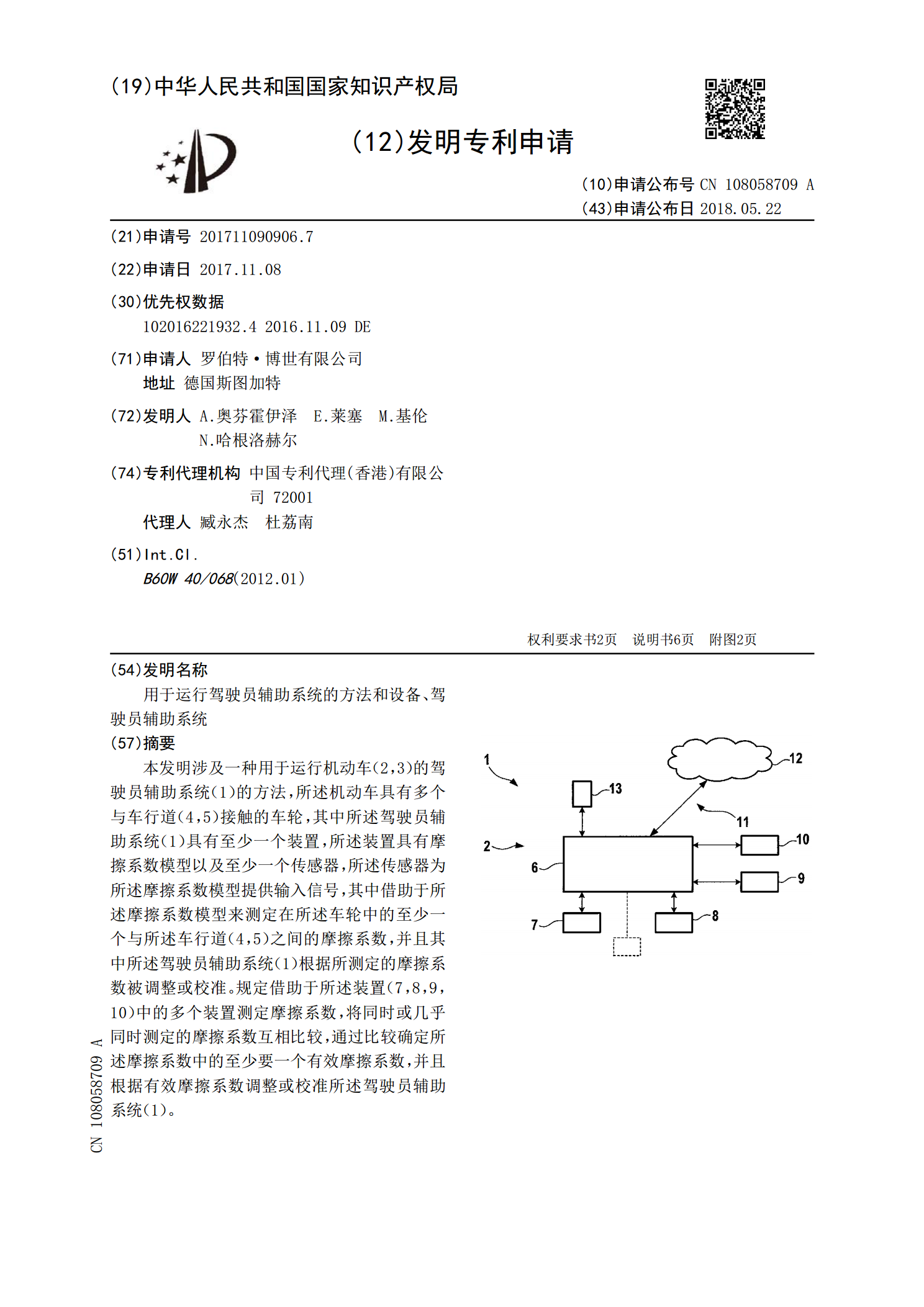
本发明涉及一种用于运行机动车(2,3)的驾驶员辅助系统(1)的方法,所述机动车具有多个与车行道(4,5)接触的车轮,其中所述驾驶员辅助系统(1)具有至少一个装置,所述装置具有摩擦系数模型以及至少一个传感器,所述传感器为所述摩擦系数模型提供输入信号,其中借助于所述摩擦系数模型来测定在所述车轮中的至少一个与所述车行道(4,5)之间的摩擦系数,并且其中所述驾驶员辅助系统(1)根据所测定的摩擦系数被调整或校准。规定借助于所述装置(7,8,9,10)中的多个装置测定摩擦系数,将同时或几乎同时测定的摩擦系数互相比较,

用于运行驾驶员辅助系统的方法以及驾驶员辅助系统.pdf
本发明涉及一种用于运行驾驶员辅助系统的方法和一种驾驶员辅助系统。所述方法具有以下步骤:确定(S01)车辆(F)的周围环境中的行人(FG)的当前位置;确定(S02)行人(FG)的第一当前运动状态;确定(S03)车辆(F)的第二当前运动状态;计算(S04)行人(FG)的停留概率分布,其中停留概率分布是时间和空间的函数并且基于行人运动模型结合行人(FG)的所确定的当前位置和行人(FG)的所确定的当前运动状态;基于行人(FG)的所计算的停留概率分布和车辆(F)的第二当前运动状态计算(S05)轨迹,其具有所述车辆(
用于确定驾驶员辅助系统的驾驶员特定盲点的方法,驾驶员辅助系统以及机动车辆.pdf
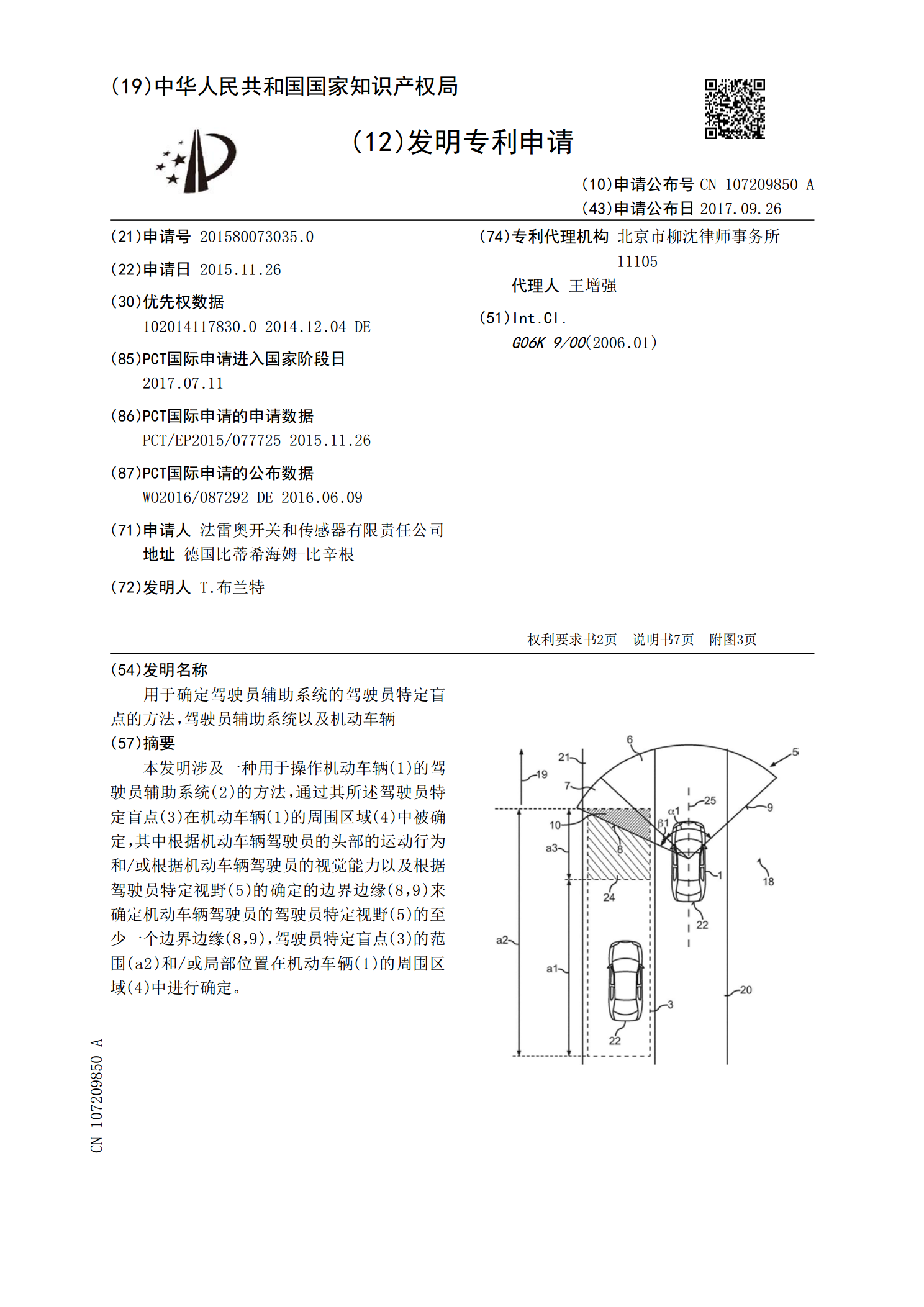
本发明涉及一种用于操作机动车辆(1)的驾驶员辅助系统(2)的方法,通过其所述驾驶员特定盲点(3)在机动车辆(1)的周围区域(4)中被确定,其中根据机动车辆驾驶员的头部的运动行为和/或根据机动车辆驾驶员的视觉能力以及根据驾驶员特定视野(5)的确定的边界边缘(8,9)来确定机动车辆驾驶员的驾驶员特定视野(5)的至少一个边界边缘(8,9),驾驶员特定盲点(3)的范围(a2)和/或局部位置在机动车辆(1)的周围区域(4)中进行确定。