
一种搬运伸缩机构及搬运装置.pdf

一条****彩妍


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种搬运伸缩机构及搬运装置.pdf
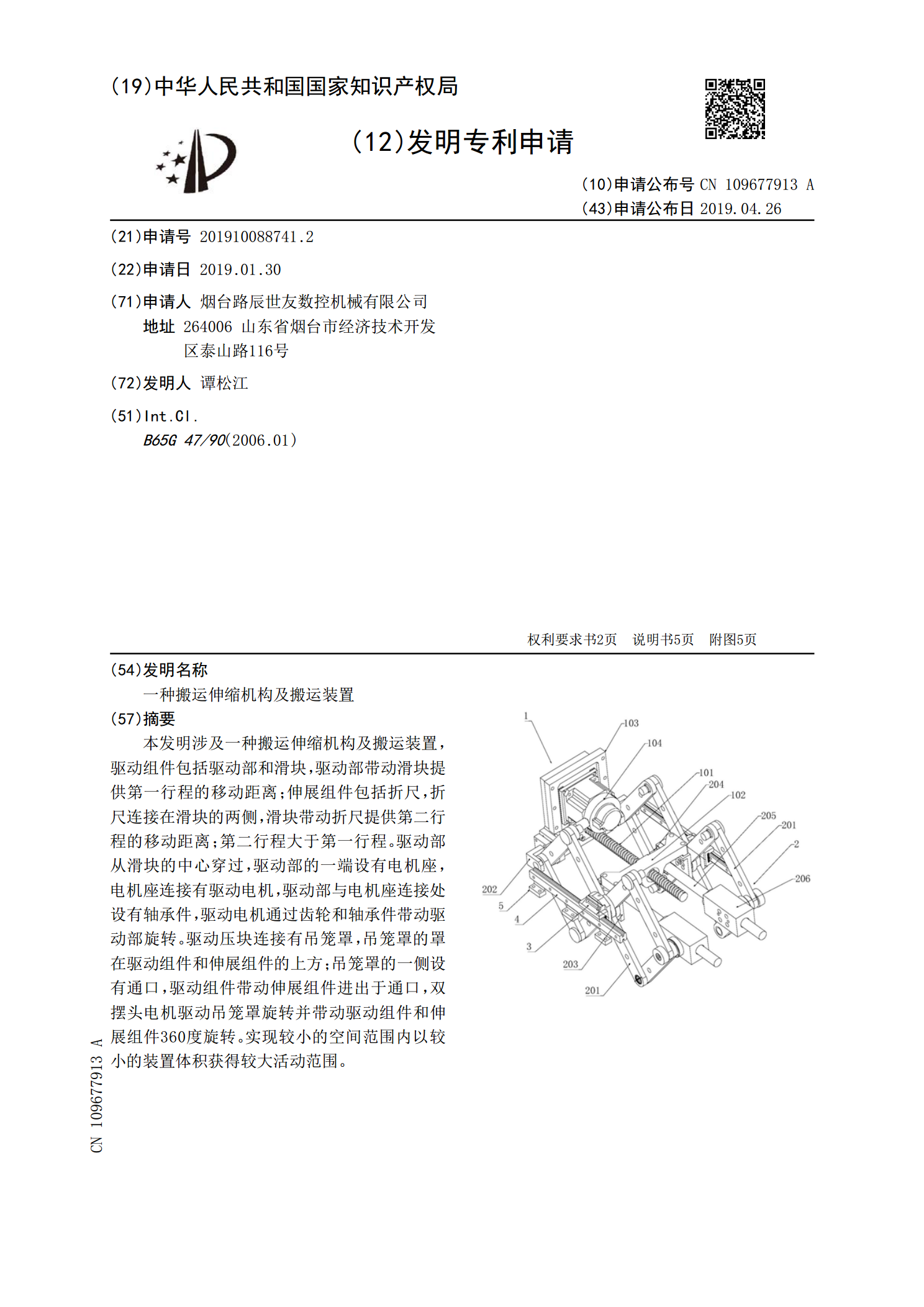
本发明涉及一种搬运伸缩机构及搬运装置,驱动组件包括驱动部和滑块,驱动部带动滑块提供第一行程的移动距离;伸展组件包括折尺,折尺连接在滑块的两侧,滑块带动折尺提供第二行程的移动距离;第二行程大于第一行程。驱动部从滑块的中心穿过,驱动部的一端设有电机座,电机座连接有驱动电机,驱动部与电机座连接处设有轴承件,驱动电机通过齿轮和轴承件带动驱动部旋转。驱动压块连接有吊笼罩,吊笼罩的罩在驱动组件和伸展组件的上方;吊笼罩的一侧设有通口,驱动组件带动伸展组件进出于通口,双摆头电机驱动吊笼罩旋转并带动驱动组件和伸展组件360

一种具有伸缩装置的搬运设备.pdf
本发明公开了一种具有伸缩装置的搬运设备,包括车架、位于车架上的主动车轮;所述车架包括两端的两个端壁;所述车架的两侧分别具有一个伸缩装置;所述伸缩装置包括两个机械臂导向块、连接两个机械臂导向块的连接件;所述车架的端壁上均设有与机械臂导向块配合的滑轨;能够直接通过伸缩装置的机械臂导向块将连接件及连接件上的执行端挂架相对于车架伸出或者收回。该执行端挂架上可以按照需要设置不同的执行端部件,从而增加该搬运设备的多功能性。
一种可伸缩的物料搬运装置.pdf
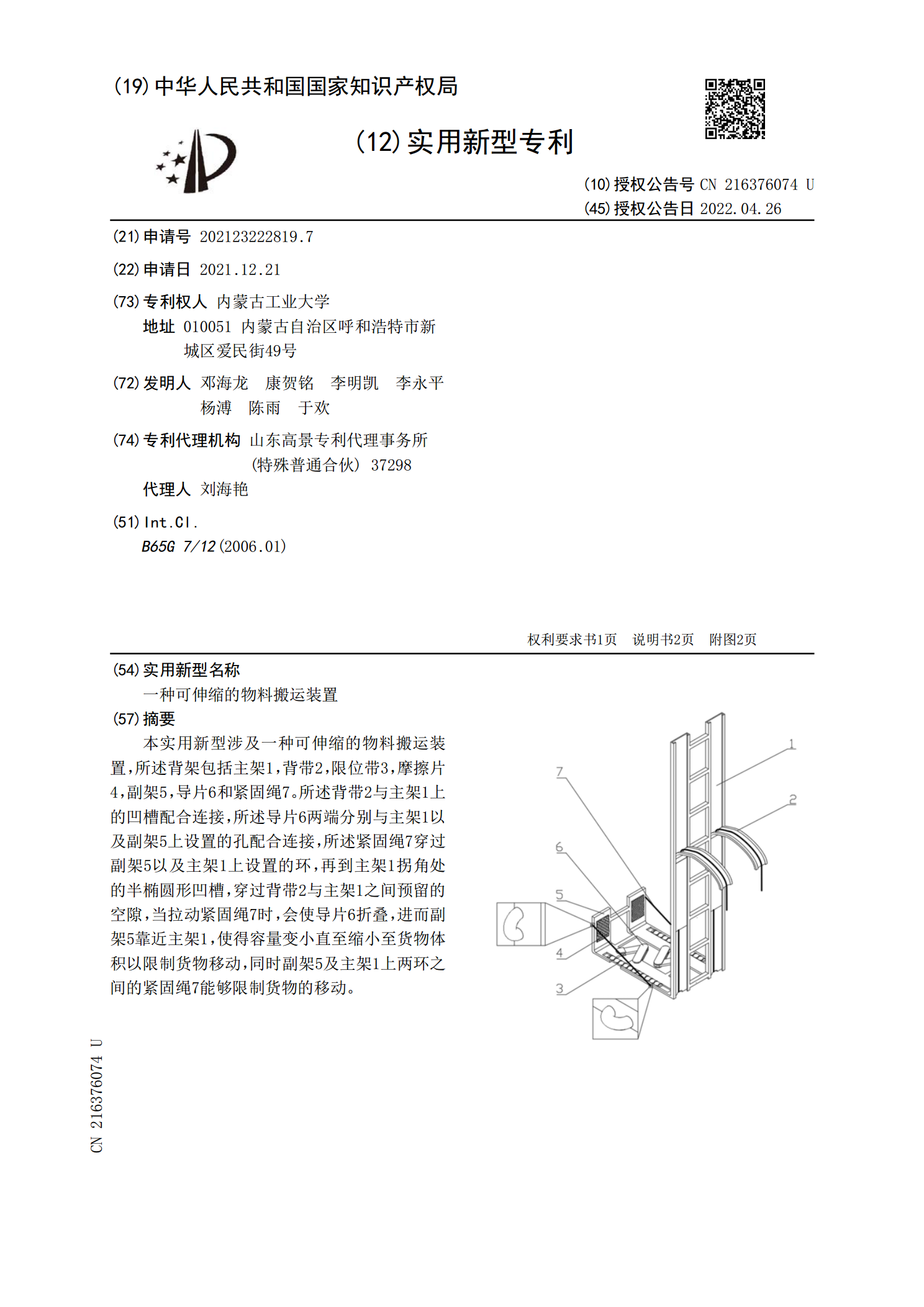
本实用新型涉及一种可伸缩的物料搬运装置,所述背架包括主架1,背带2,限位带3,摩擦片4,副架5,导片6和紧固绳7。所述背带2与主架1上的凹槽配合连接,所述导片6两端分别与主架1以及副架5上设置的孔配合连接,所述紧固绳7穿过副架5以及主架1上设置的环,再到主架1拐角处的半椭圆形凹槽,穿过背带2与主架1之间预留的空隙,当拉动紧固绳7时,会使导片6折叠,进而副架5靠近主架1,使得容量变小直至缩小至货物体积以限制货物移动,同时副架5及主架1上两环之间的紧固绳7能够限制货物的移动。
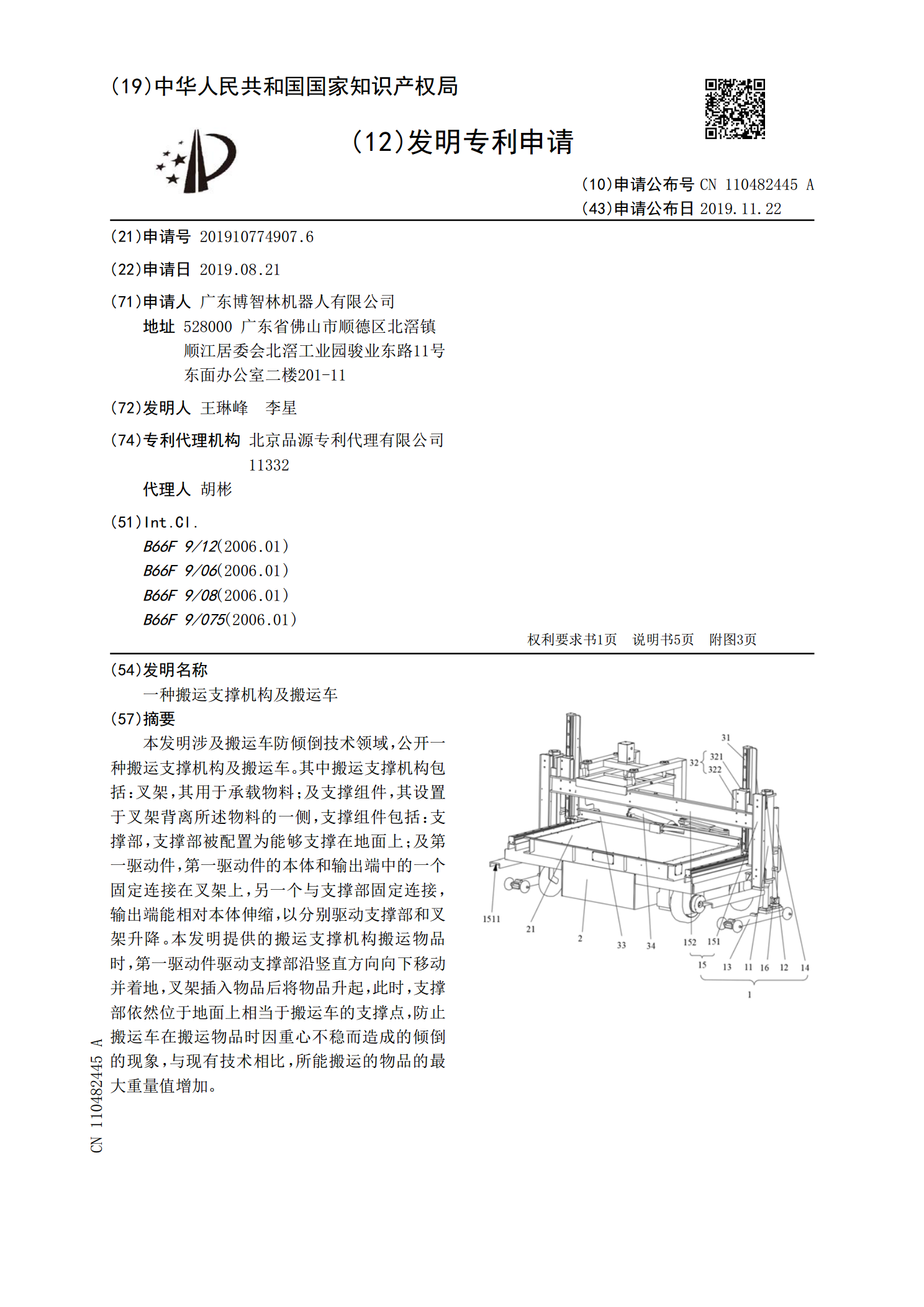
一种搬运支撑机构及搬运车.pdf
本发明涉及搬运车防倾倒技术领域,公开一种搬运支撑机构及搬运车。其中搬运支撑机构包括:叉架,其用于承载物料;及支撑组件,其设置于叉架背离所述物料的一侧,支撑组件包括:支撑部,支撑部被配置为能够支撑在地面上;及第一驱动件,第一驱动件的本体和输出端中的一个固定连接在叉架上,另一个与支撑部固定连接,输出端能相对本体伸缩,以分别驱动支撑部和叉架升降。本发明提供的搬运支撑机构搬运物品时,第一驱动件驱动支撑部沿竖直方向向下移动并着地,叉架插入物品后将物品升起,此时,支撑部依然位于地面上相当于搬运车的支撑点,防止搬运车在
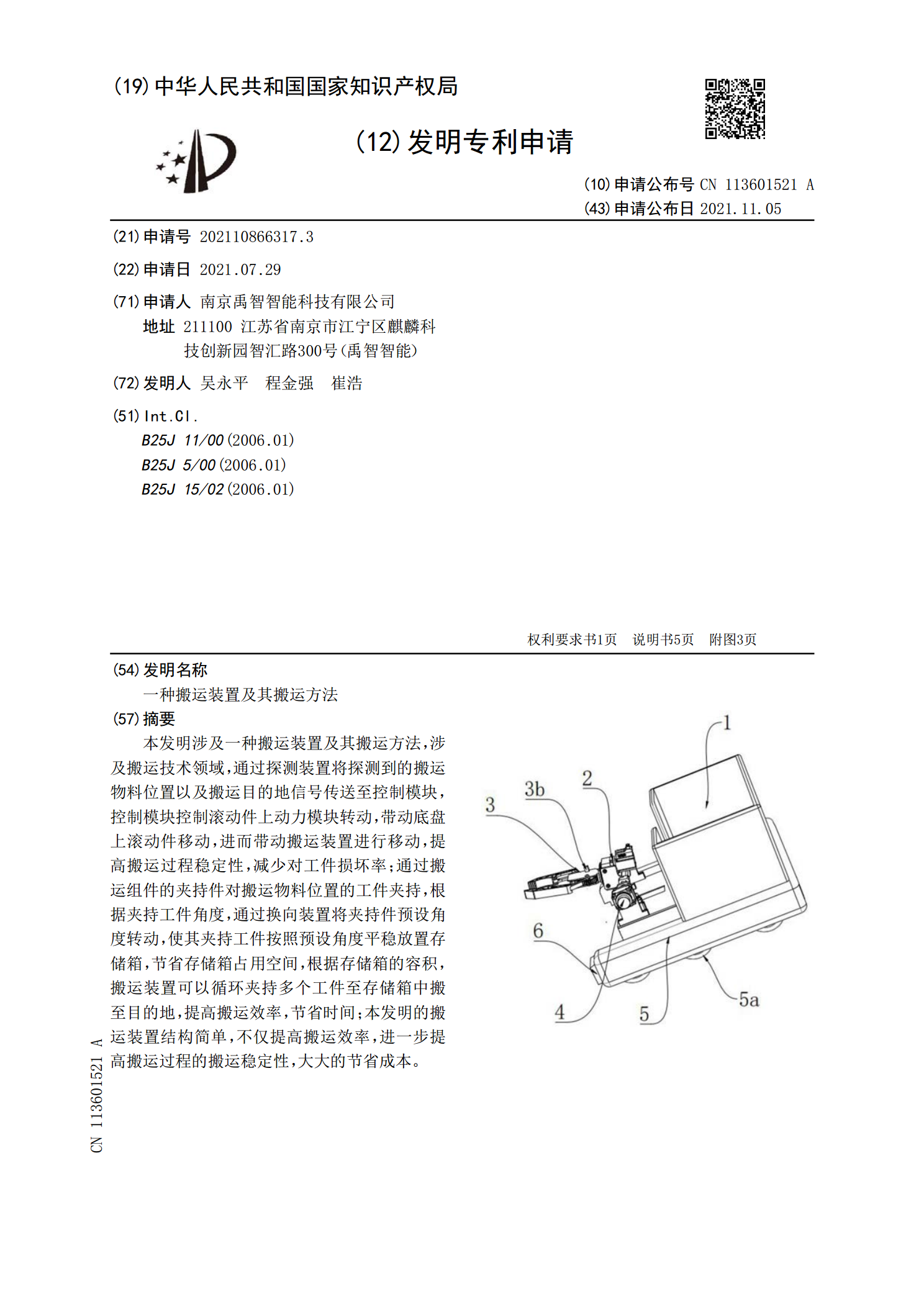
一种搬运装置及其搬运方法.pdf
本发明涉及一种搬运装置及其搬运方法,涉及搬运技术领域,通过探测装置将探测到的搬运物料位置以及搬运目的地信号传送至控制模块,控制模块控制滚动件上动力模块转动,带动底盘上滚动件移动,进而带动搬运装置进行移动,提高搬运过程稳定性,减少对工件损坏率;通过搬运组件的夹持件对搬运物料位置的工件夹持,根据夹持工件角度,通过换向装置将夹持件预设角度转动,使其夹持工件按照预设角度平稳放置存储箱,节省存储箱占用空间,根据存储箱的容积,搬运装置可以循环夹持多个工件至存储箱中搬至目的地,提高搬运效率,节省时间;本发明的搬运装置结