
一种搬运支撑机构及搬运车.pdf

景山****魔王

1/10
2/10

3/10
4/10
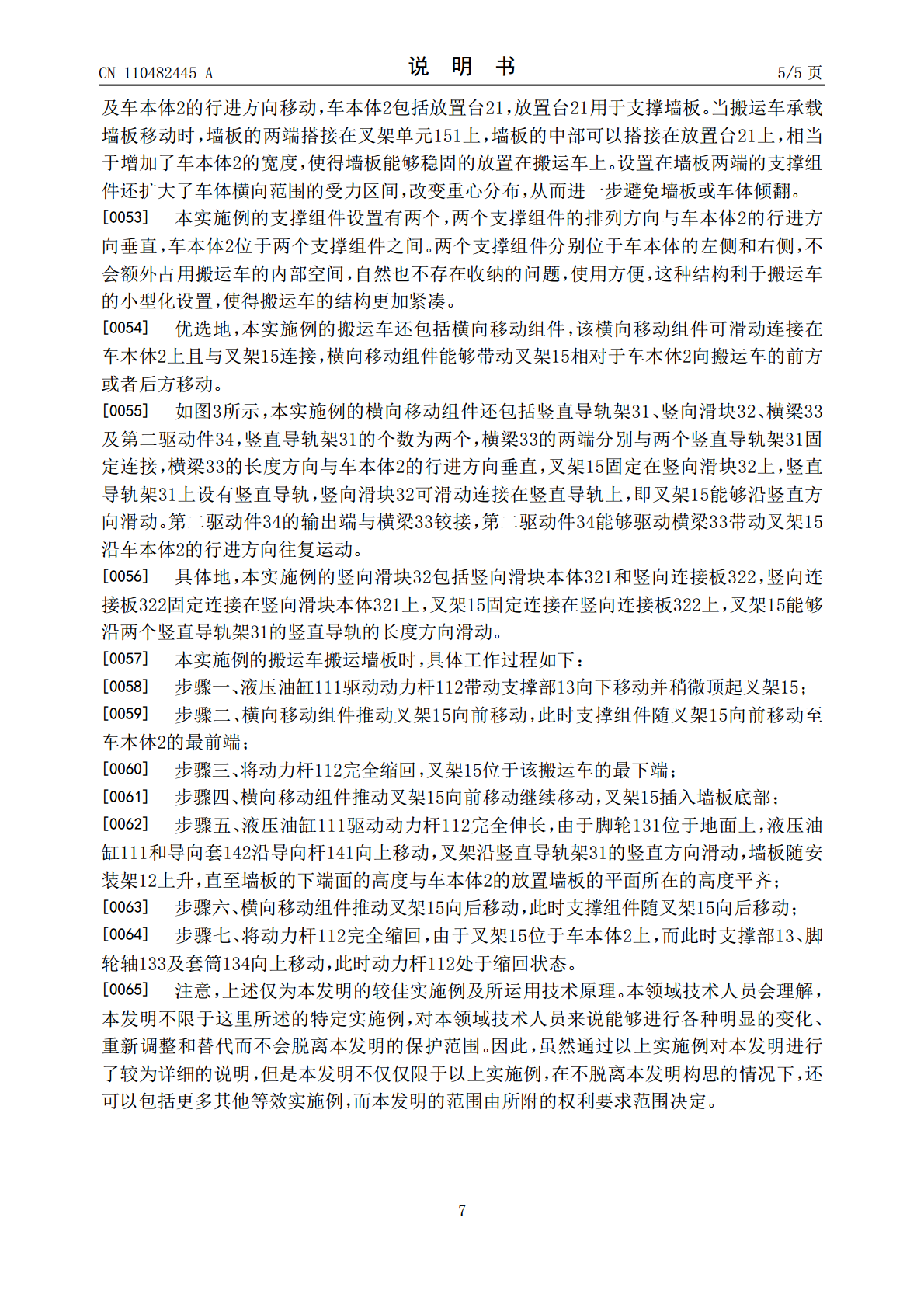
5/10

6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种搬运支撑机构及搬运车.pdf
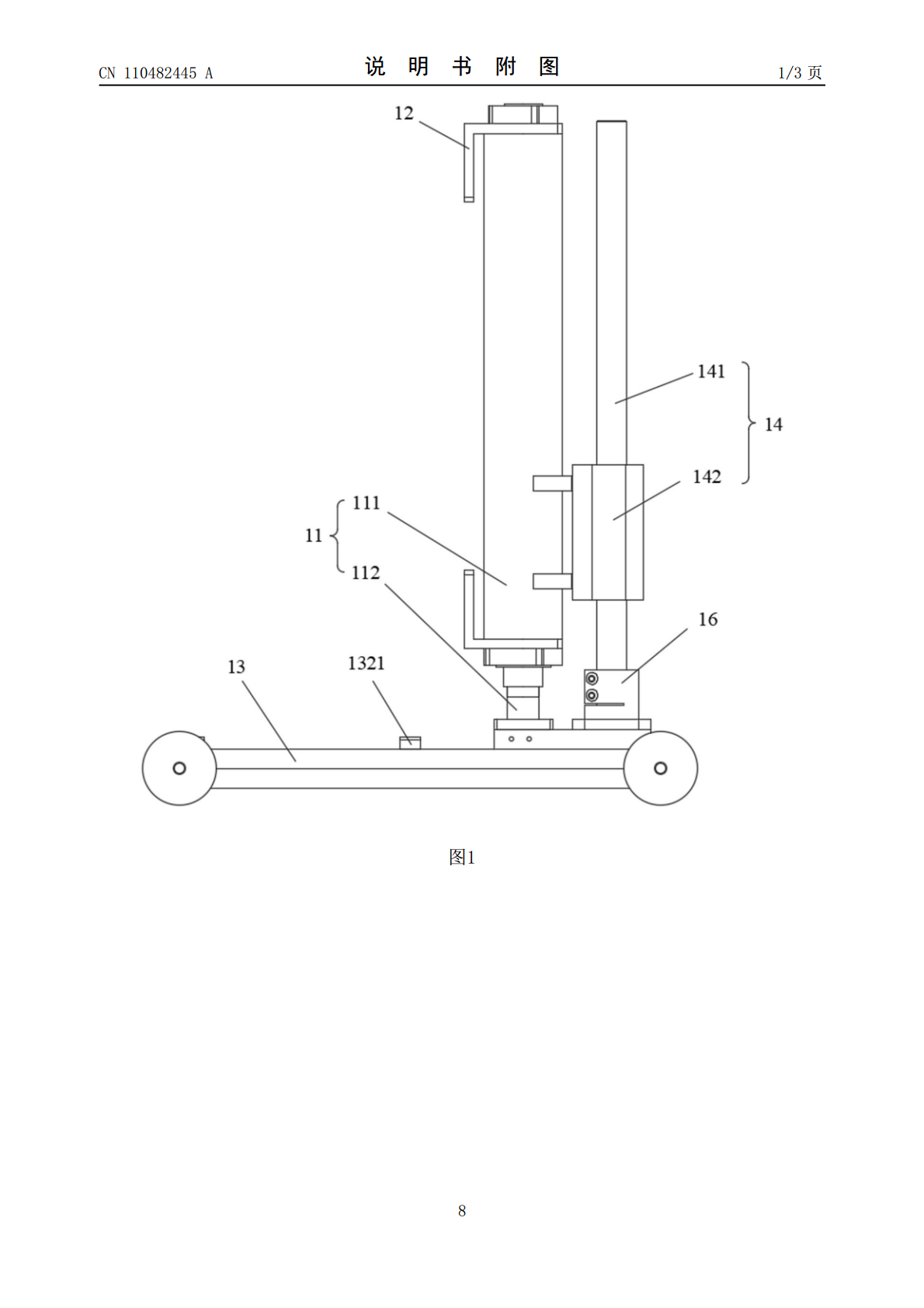
本发明涉及搬运车防倾倒技术领域,公开一种搬运支撑机构及搬运车。其中搬运支撑机构包括:叉架,其用于承载物料;及支撑组件,其设置于叉架背离所述物料的一侧,支撑组件包括:支撑部,支撑部被配置为能够支撑在地面上;及第一驱动件,第一驱动件的本体和输出端中的一个固定连接在叉架上,另一个与支撑部固定连接,输出端能相对本体伸缩,以分别驱动支撑部和叉架升降。本发明提供的搬运支撑机构搬运物品时,第一驱动件驱动支撑部沿竖直方向向下移动并着地,叉架插入物品后将物品升起,此时,支撑部依然位于地面上相当于搬运车的支撑点,防止搬运车在
AGV搬运车的辅助支撑机构及其搬运方法.pdf
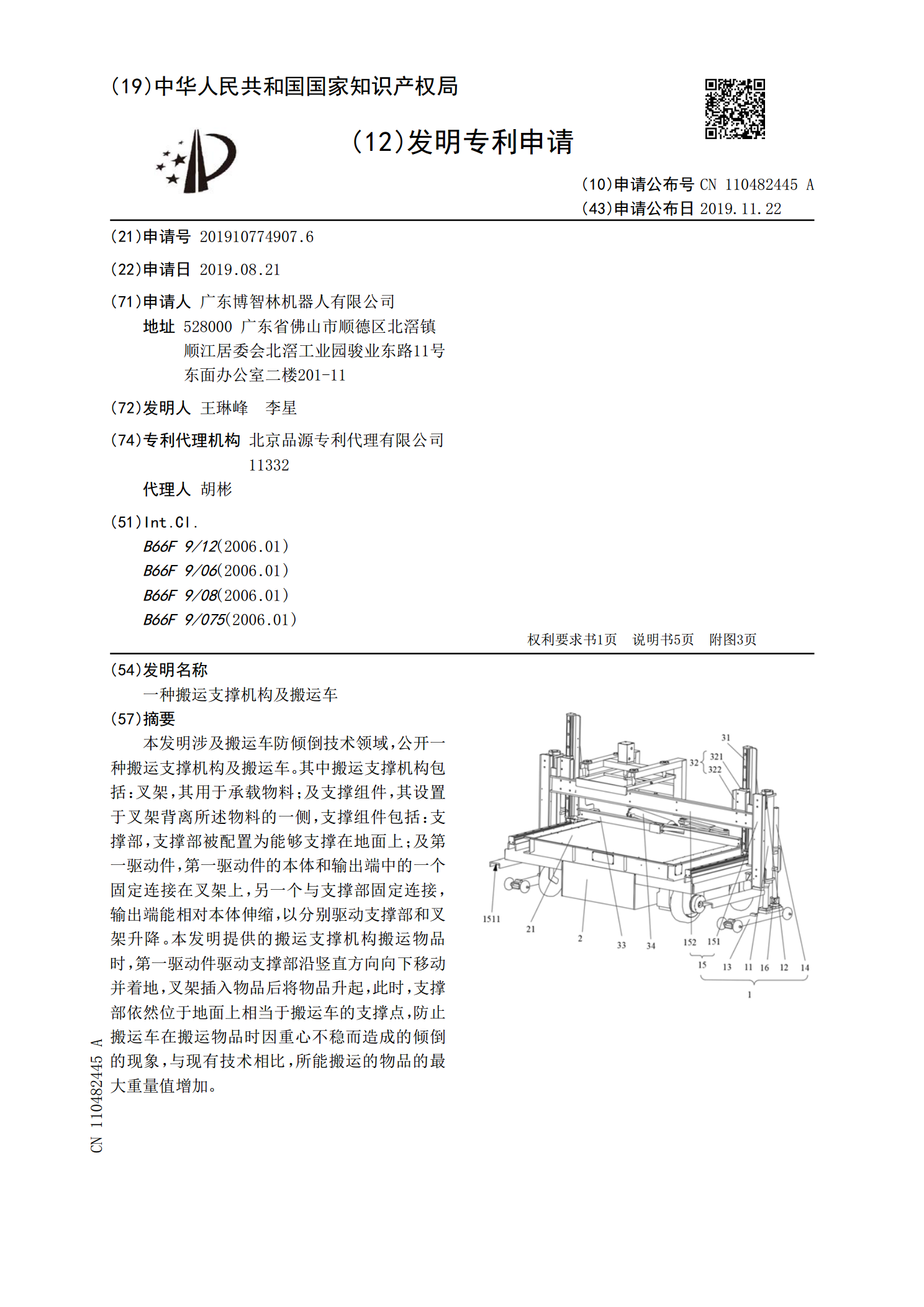
本发明提供一种AGV搬运车的辅助支撑机构及其搬运方法,所述辅助支撑机构包括:车身总成、驱动总成、承重轮总成以及起升总成,其中,所述起升总成与所述车身总成滑动连接;所述驱动总成和承重轮总成分别与所述车身总成固定连接;所述起升总成包括推拉力臂块、推杆组件和起升力臂块,所述推拉力臂块通过推杆组件连接至所述起升力臂块,以实现所述起升总成的起升操作。本发明保证了AGV搬运车的行驶稳定性,且所驱动总成的驱动轮和所述承重轮总成中的承重轮之间的轮距保持不变,保证了AGV搬运车的行驶及定位精度,并减小了车身的重量,有效减小
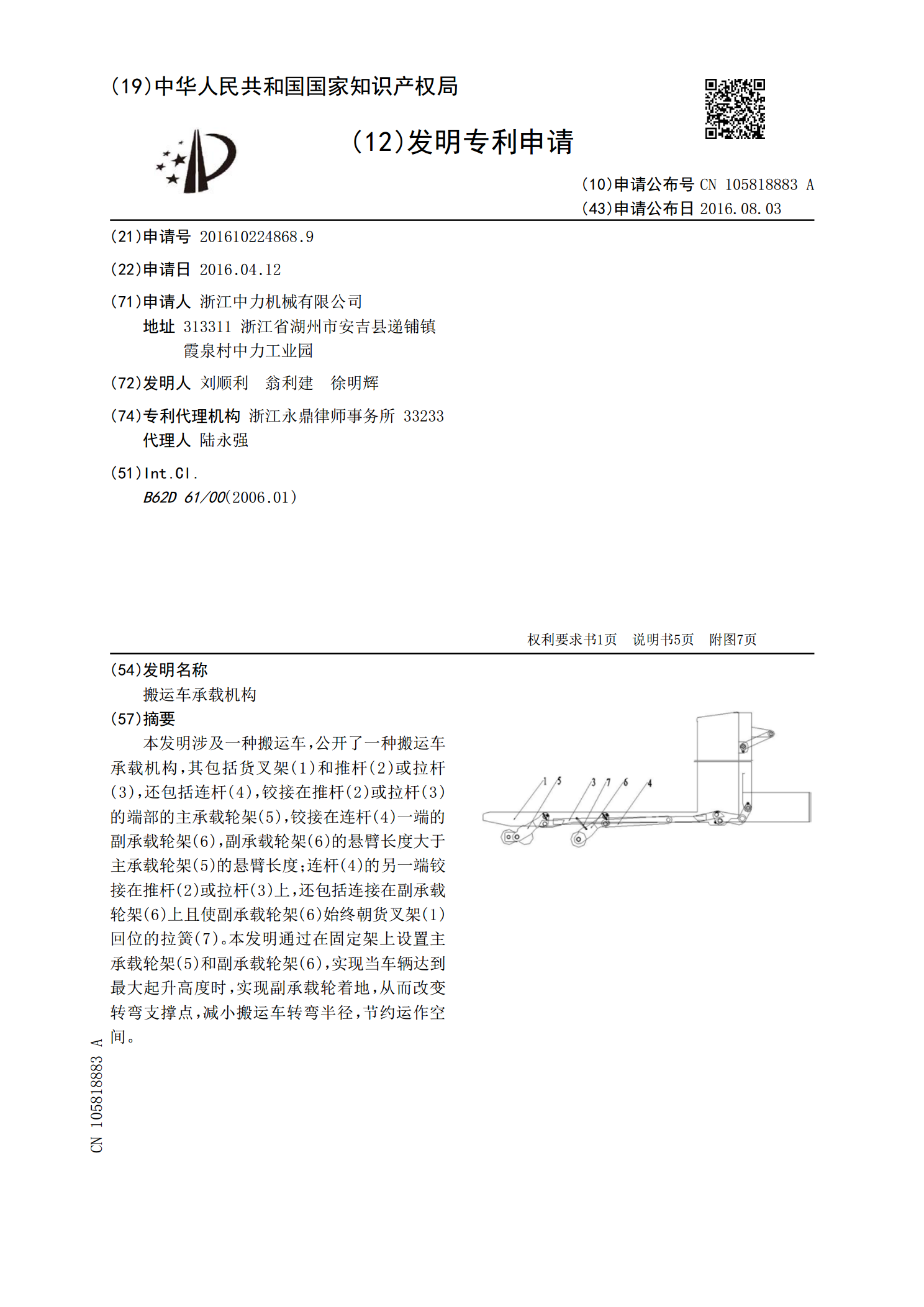
搬运车承载机构.pdf
本发明涉及一种搬运车,公开了一种搬运车承载机构,其包括货叉架(1)和推杆(2)或拉杆(3),还包括连杆(4),铰接在推杆(2)或拉杆(3)的端部的主承载轮架(5),铰接在连杆(4)一端的副承载轮架(6),副承载轮架(6)的悬臂长度大于主承载轮架(5)的悬臂长度;连杆(4)的另一端铰接在推杆(2)或拉杆(3)上,还包括连接在副承载轮架(6)上且使副承载轮架(6)始终朝货叉架(1)回位的拉簧(7)。本发明通过在固定架上设置主承载轮架(5)和副承载轮架(6),实现当车辆达到最大起升高度时,实现副承载轮着地,从而
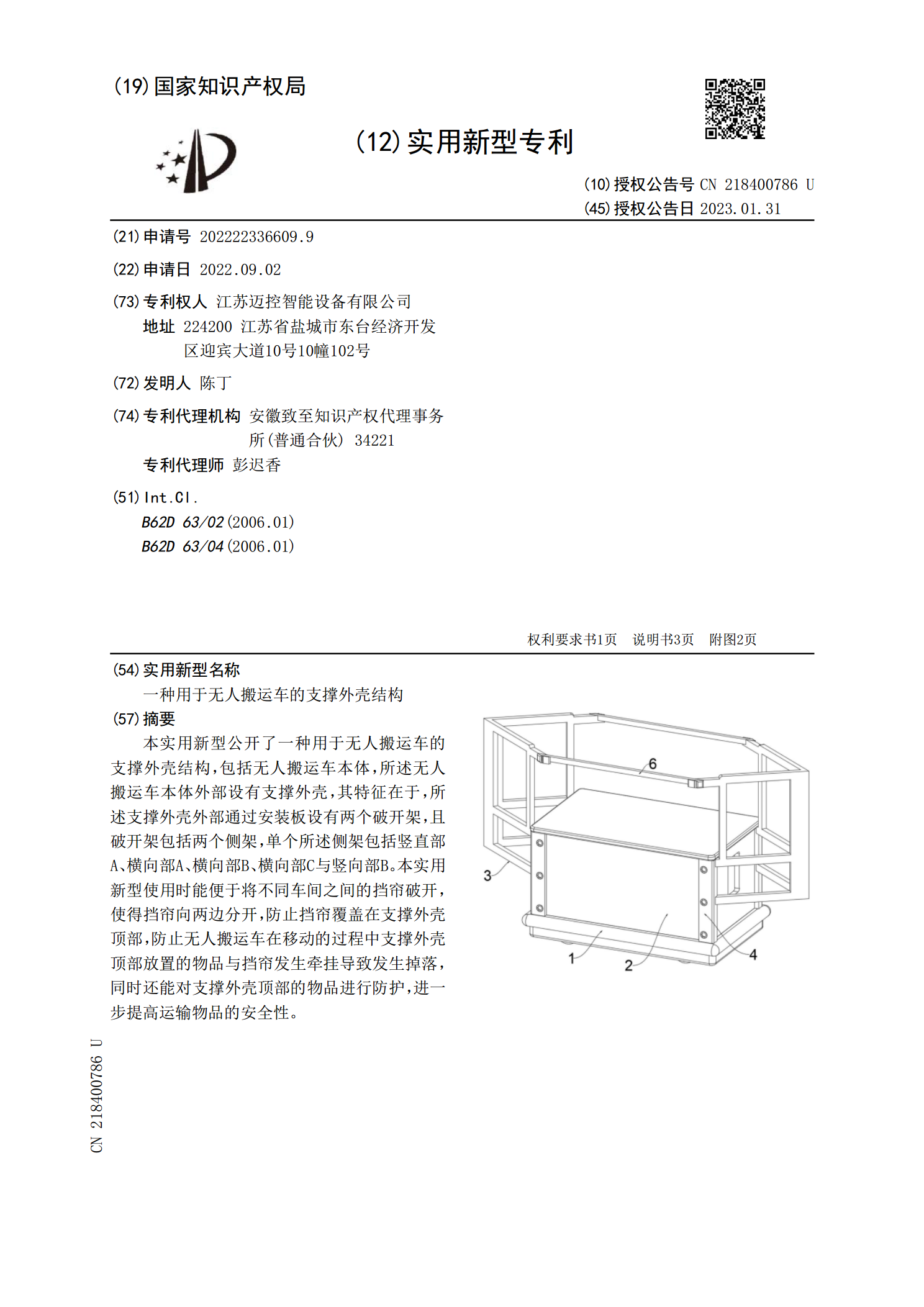
一种用于无人搬运车的支撑外壳结构.pdf
本实用新型公开了一种用于无人搬运车的支撑外壳结构,包括无人搬运车本体,所述无人搬运车本体外部设有支撑外壳,其特征在于,所述支撑外壳外部通过安装板设有两个破开架,且破开架包括两个侧架,单个所述侧架包括竖直部A、横向部A、横向部B、横向部C与竖向部B。本实用新型使用时能便于将不同车间之间的挡帘破开,使得挡帘向两边分开,防止挡帘覆盖在支撑外壳顶部,防止无人搬运车在移动的过程中支撑外壳顶部放置的物品与挡帘发生牵挂导致发生掉落,同时还能对支撑外壳顶部的物品进行防护,进一步提高运输物品的安全性。
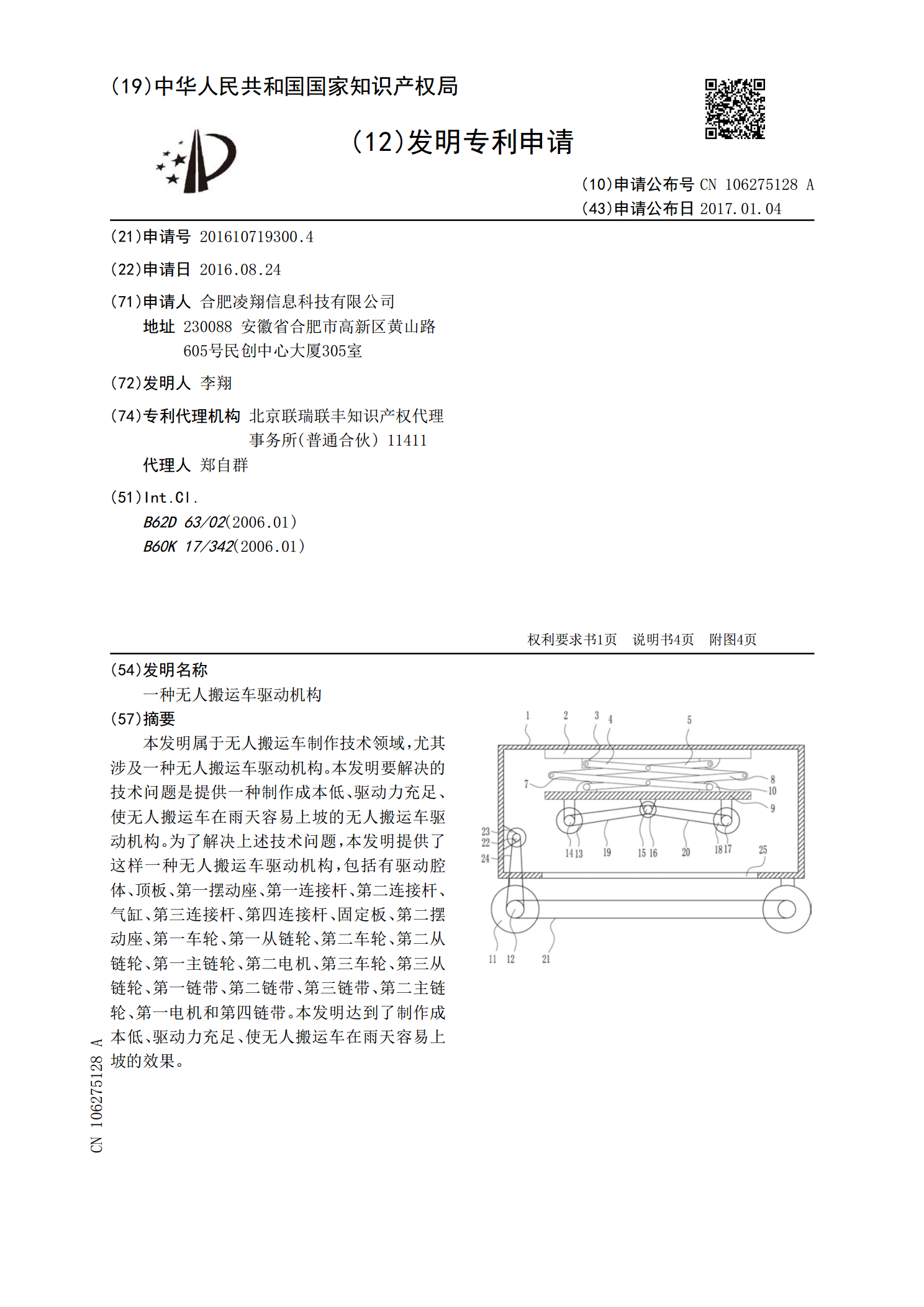
一种无人搬运车驱动机构.pdf
本发明属于无人搬运车制作技术领域,尤其涉及一种无人搬运车驱动机构。本发明要解决的技术问题是提供一种制作成本低、驱动力充足、使无人搬运车在雨天容易上坡的无人搬运车驱动机构。为了解决上述技术问题,本发明提供了这样一种无人搬运车驱动机构,包括有驱动腔体、顶板、第一摆动座、第一连接杆、第二连接杆、气缸、第三连接杆、第四连接杆、固定板、第二摆动座、第一车轮、第一从链轮、第二车轮、第二从链轮、第一主链轮、第二电机、第三车轮、第三从链轮、第一链带、第二链带、第三链带、第二主链轮、第一电机和第四链带。本发明达到了制作成本