
低压型增程式电动汽车增程器控制系统及能量管理方法.pdf

努力****星驰

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

低压型增程式电动汽车增程器控制系统及能量管理方法.pdf
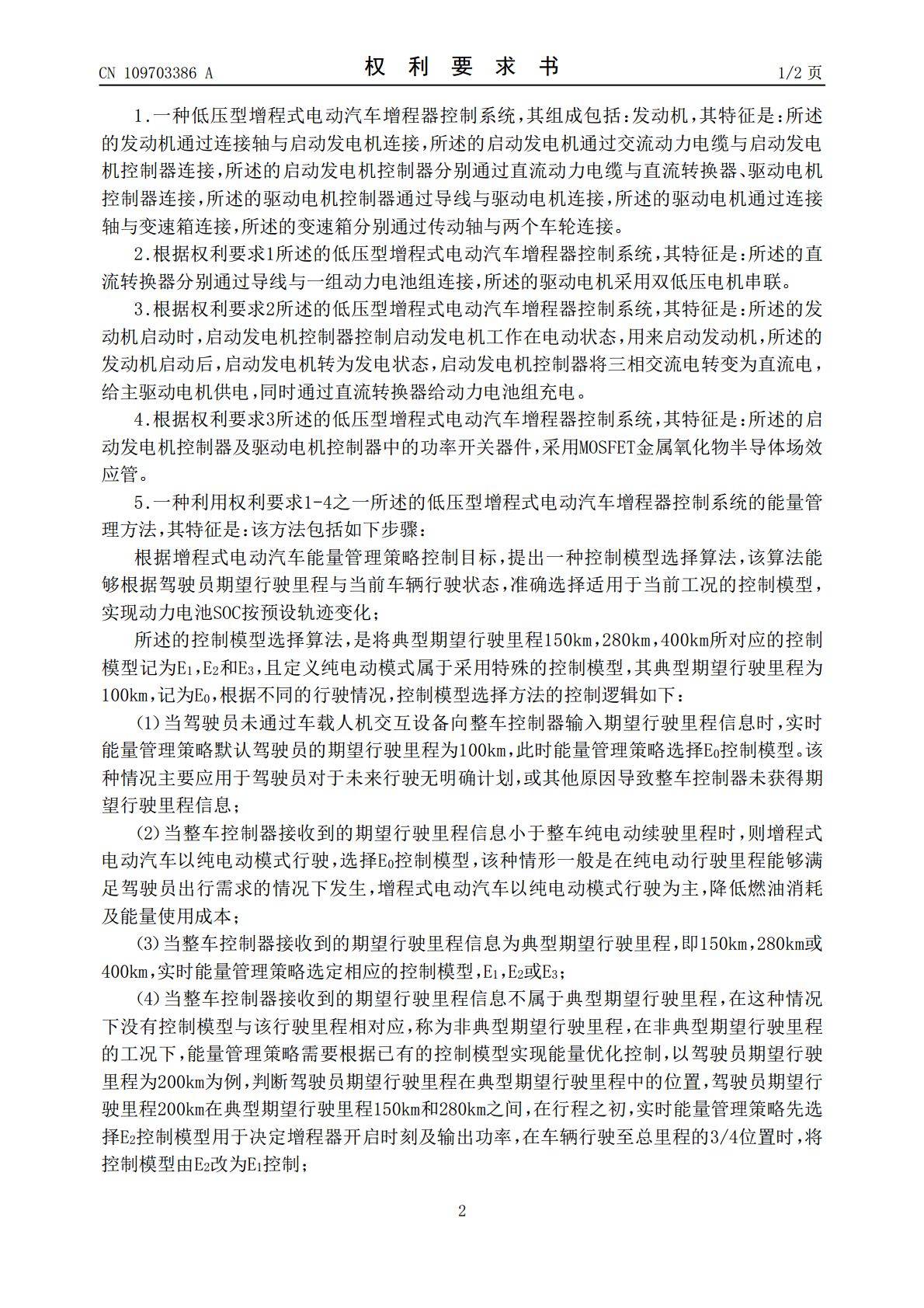
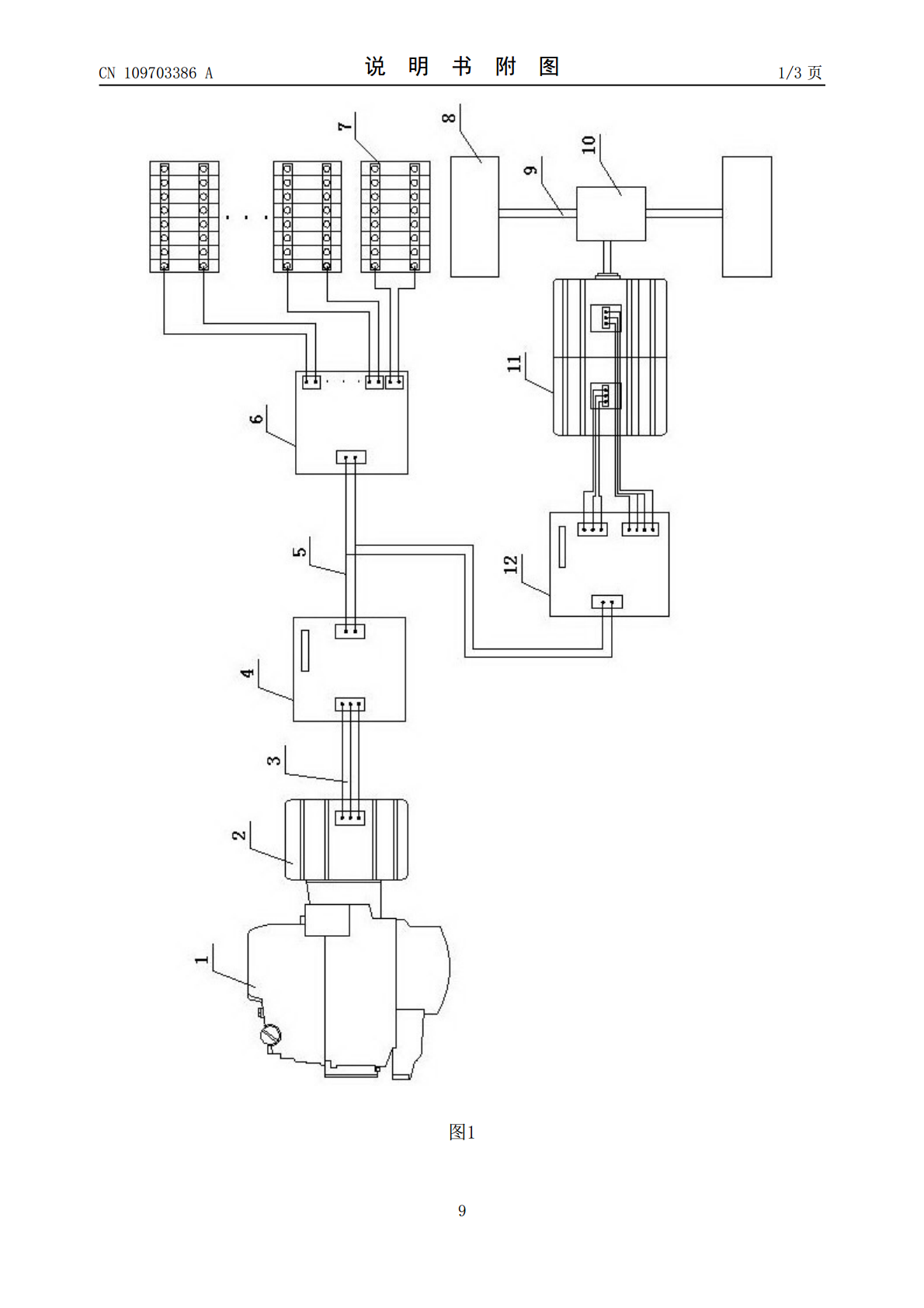
低压型增程式电动汽车增程器控制系统及能量管理方法。目前增程式电动汽车的动力系统以高电压为主,加大了电气部件的设计难度,使电池电芯的串联数量增多,电池管理更加复杂。本发明其组成包括:发动机(1),所述的发动机通过连接轴与启动发电机(2)连接,所述的启动发电机通过交流动力电缆(3)与启动发电机控制器(4)连接,所述的启动发电机控制器分别通过直流动力电缆(5)与直流转换器(6)、驱动电机控制器(12)连接,所述的驱动电机控制器通过导线与驱动电机(11)连接,所述的驱动电机通过连接轴与变速箱(10)连接,所述的变
电动汽车增程器启停控制系统.pdf
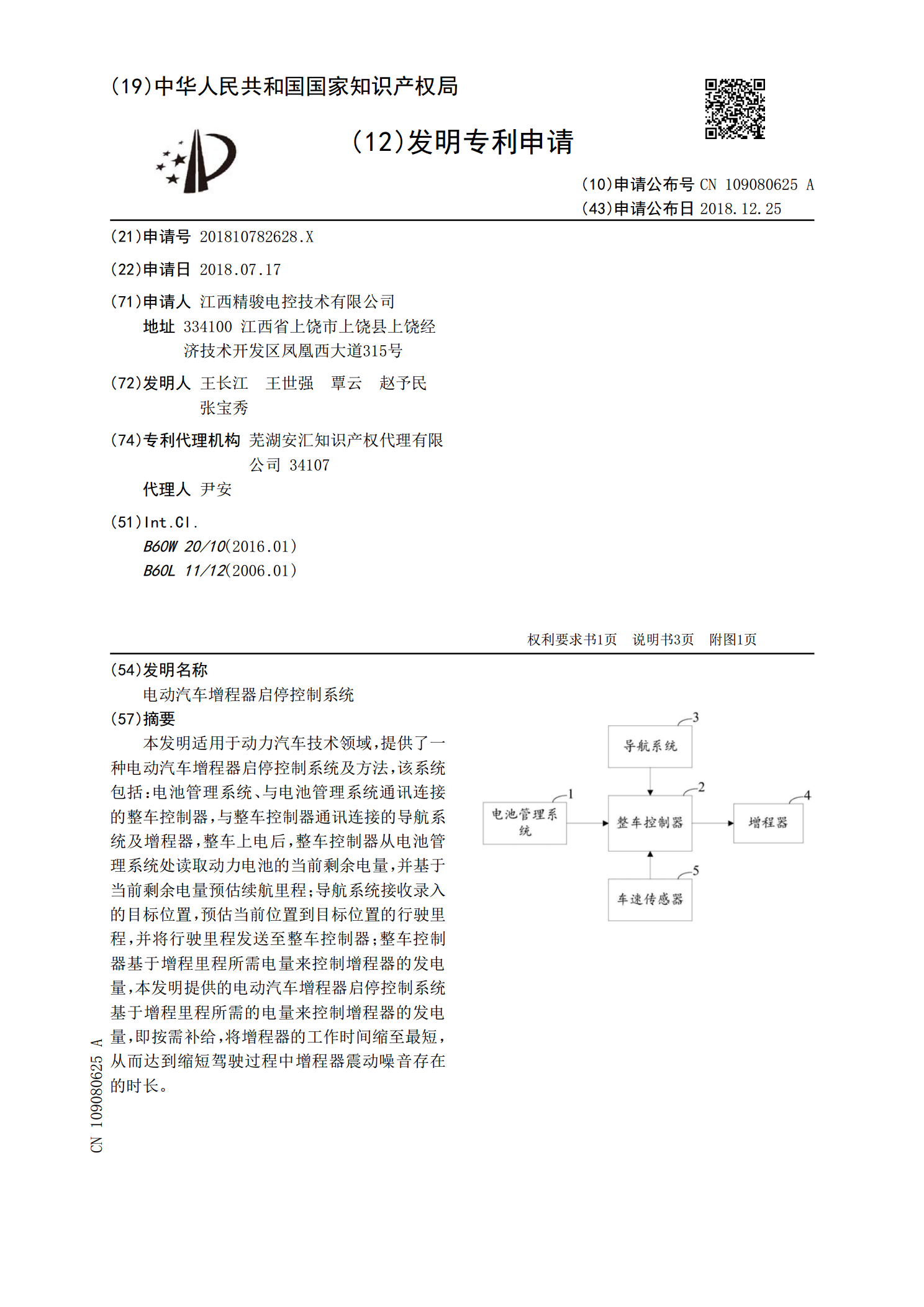
本发明适用于动力汽车技术领域,提供了一种电动汽车增程器启停控制系统及方法,该系统包括:电池管理系统、与电池管理系统通讯连接的整车控制器,与整车控制器通讯连接的导航系统及增程器,整车上电后,整车控制器从电池管理系统处读取动力电池的当前剩余电量,并基于当前剩余电量预估续航里程;导航系统接收录入的目标位置,预估当前位置到目标位置的行驶里程,并将行驶里程发送至整车控制器;整车控制器基于增程里程所需电量来控制增程器的发电量,本发明提供的电动汽车增程器启停控制系统基于增程里程所需的电量来控制增程器的发电量,即按需补给
一种增程式电动汽车增程系统.pdf
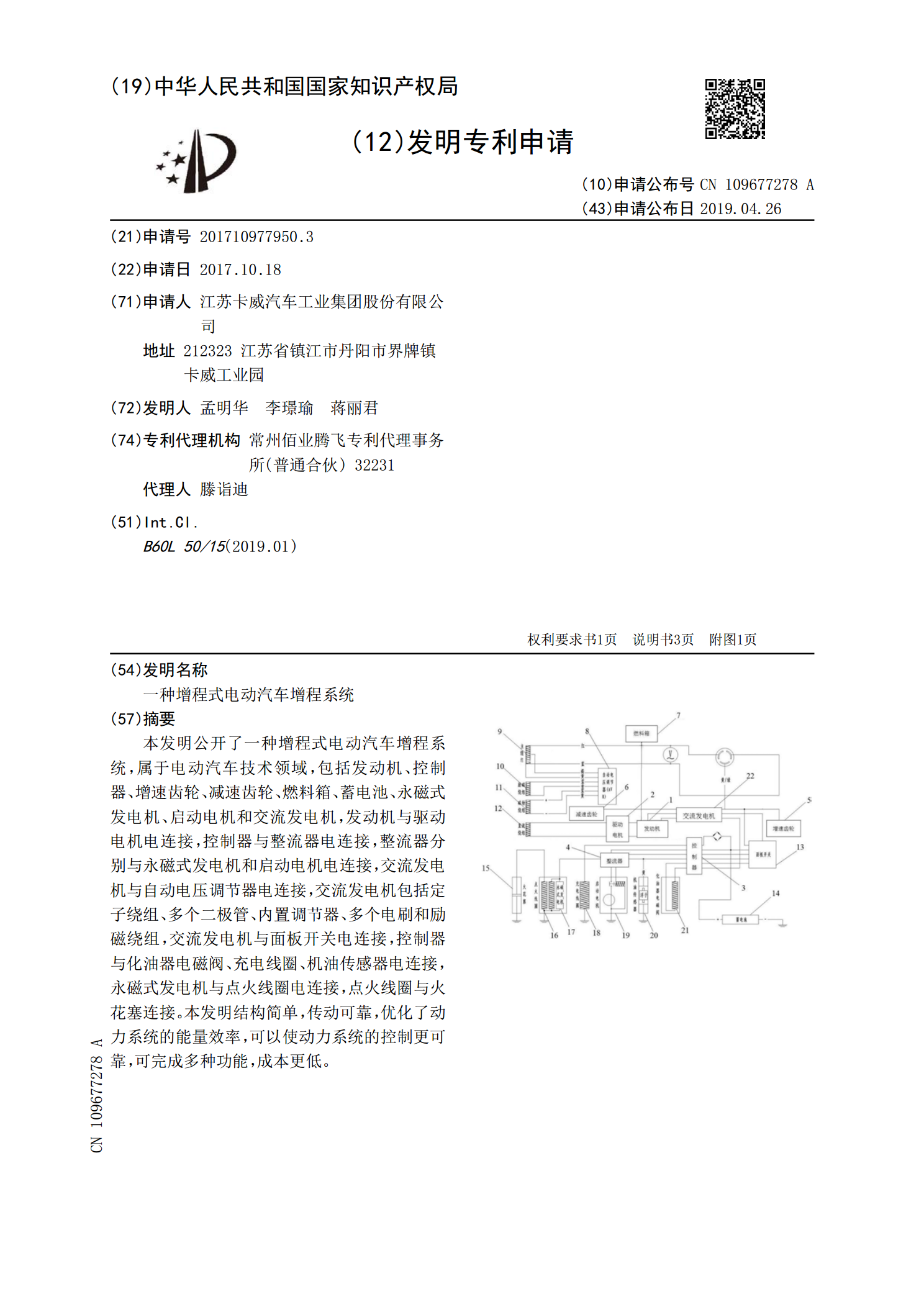
本发明公开了一种增程式电动汽车增程系统,属于电动汽车技术领域,包括发动机、控制器、增速齿轮、减速齿轮、燃料箱、蓄电池、永磁式发电机、启动电机和交流发电机,发动机与驱动电机电连接,控制器与整流器电连接,整流器分别与永磁式发电机和启动电机电连接,交流发电机与自动电压调节器电连接,交流发电机包括定子绕组、多个二极管、内置调节器、多个电刷和励磁绕组,交流发电机与面板开关电连接,控制器与化油器电磁阀、充电线圈、机油传感器电连接,永磁式发电机与点火线圈电连接,点火线圈与火花塞连接。本发明结构简单,传动可靠,优化了动力

电动汽车增程器结构.pdf
本发明公开了一种电动汽车增程器结构,包括发动机和发电机,发动机与发电机通过一离合器连接,离合器包括离合器压盘和离合器摩擦盘,发动机的输出轴与飞轮连接,离合器压盘压紧所述离合器摩擦盘,使离合器摩擦盘与飞轮摩擦连接,发电机的驱动轴与离合器摩擦盘同轴刚性连接。该电动汽车增程器结构采用离合器连接发动机和发电机,可有效缩短发动机和发电机之间的轴向尺寸,系统的一体化集成度较高,有利于控制动力传递轴的安装定位精度;另外当发电机动力扭矩载荷变大时,离合器的离合器摩擦盘与飞轮之间会打滑产生相对滑动,这样就可有效减小动力扭振

一种增程式电动车增程器.pdf
本发明具体涉及一种增程式电动车增程器,属于增程式新能源汽车技术领域,包括飞轮盘、发电机轴、汽油机动力输出曲轴、扭转减震器和花键轴;飞轮盘设在汽油机动力输出曲轴上;扭转减震器设在飞轮盘上;花键轴第一端连接扭转减震器;发电机轴连接花键轴的第二端;本发明和现有技术相比所具有的有益效果:采用扭转减震器将汽油机的输出轴与发电机的输出轴的刚性连接转换为柔性连接,曲轴和发电机轴可以分别校核强度刚度,降低了设计要求,同时减少发电机与汽油机圆周方向扭振,轴线方向联轴节的扭转减震器连接的方案,消除轴的内应力。