
360°轮廓测量方法.pdf

绮兰****文章


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
360°轮廓测量方法.pdf
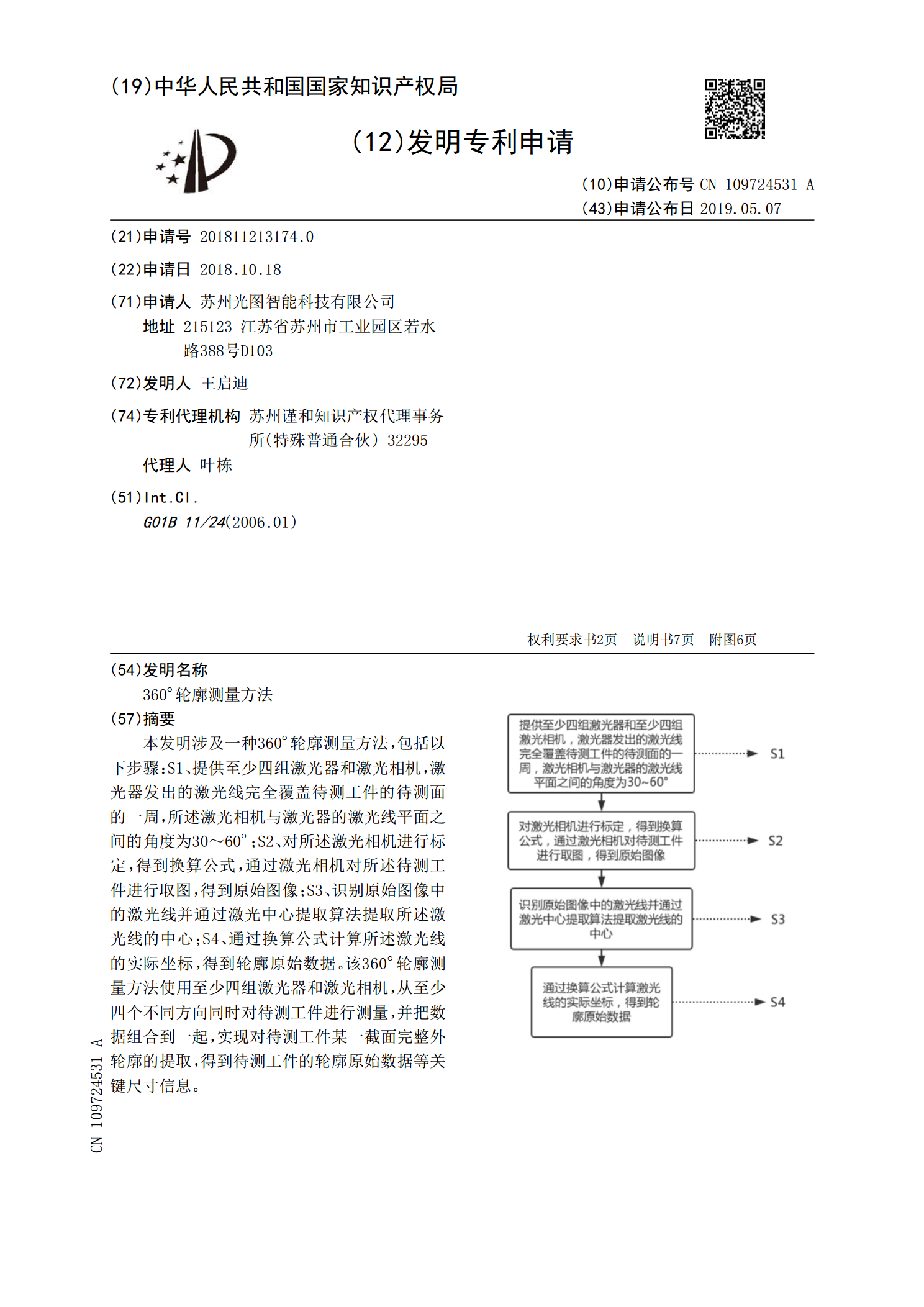
本发明涉及一种360°轮廓测量方法,包括以下步骤:S1、提供至少四组激光器和激光相机,激光器发出的激光线完全覆盖待测工件的待测面的一周,所述激光相机与激光器的激光线平面之间的角度为30~60°;S2、对所述激光相机进行标定,得到换算公式,通过激光相机对所述待测工件进行取图,得到原始图像;S3、识别原始图像中的激光线并通过激光中心提取算法提取所述激光线的中心;S4、通过换算公式计算所述激光线的实际坐标,得到轮廓原始数据。该360°轮廓测量方法使用至少四组激光器和激光相机,从至少四个不同方向同时对待测工件进行

轮廓测量方法.pdf
本发明公开了一种轮廓测量方法,其包括:S1、相机标定;S2、对条纹Mi分别进行相位-高度标定;S3、将M1投影在被测物上,根据相位-高度标定求得各观测点的高度坐标,再根据相机标定求得该各观测点的三维坐标;S4、利用前一步较宽频条纹的测量结果辅助下一步较窄频条纹解包裹获取相位,再利用标定数据,完成一次更为精确的测量;S5、循环执行步骤S4,直至对被测物的轮廓测量达到预定的精度。本发明能够对复杂外形被测物表面轮廓进行大范围且高精度的测量。
轮廓测量方法及系统.pdf
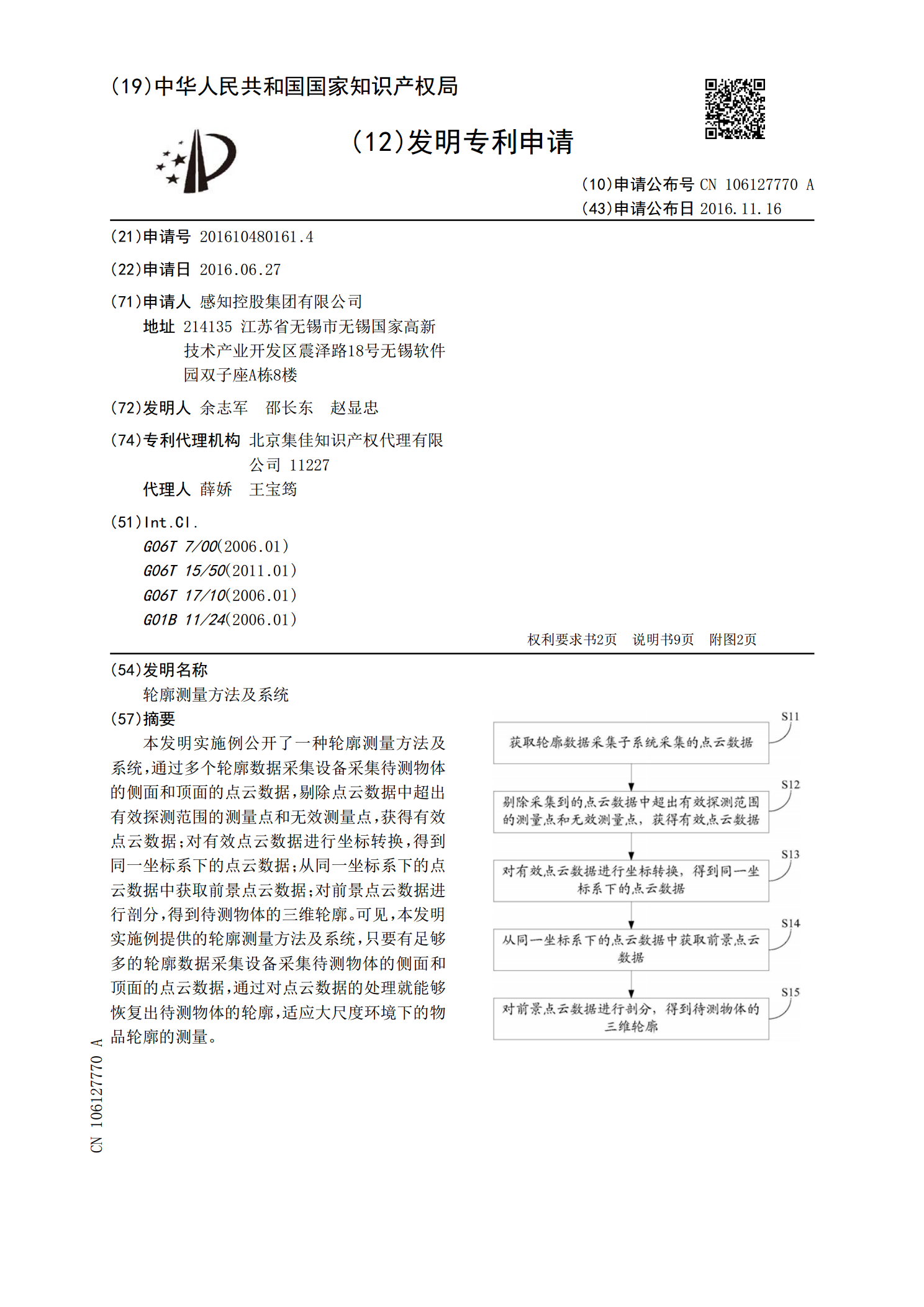
本发明实施例公开了一种轮廓测量方法及系统,通过多个轮廓数据采集设备采集待测物体的侧面和顶面的点云数据,剔除点云数据中超出有效探测范围的测量点和无效测量点,获得有效点云数据;对有效点云数据进行坐标转换,得到同一坐标系下的点云数据;从同一坐标系下的点云数据中获取前景点云数据;对前景点云数据进行剖分,得到待测物体的三维轮廓。可见,本发明实施例提供的轮廓测量方法及系统,只要有足够多的轮廓数据采集设备采集待测物体的侧面和顶面的点云数据,通过对点云数据的处理就能够恢复出待测物体的轮廓,适应大尺度环境下的物品轮廓的测量
基于线激光的轮廓测量装置及其轮廓测量方法.pdf
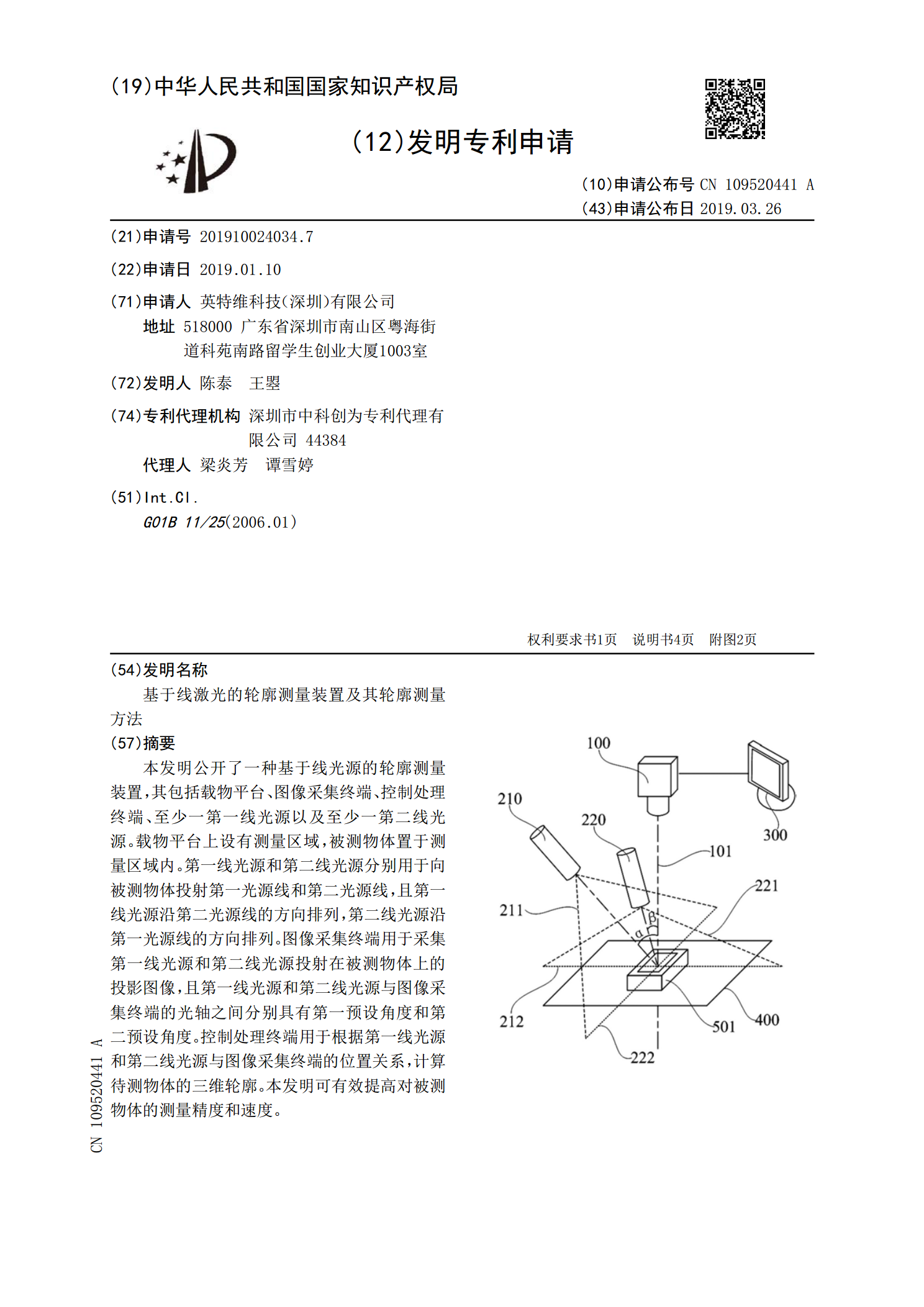
本发明公开了一种基于线光源的轮廓测量装置,其包括载物平台、图像采集终端、控制处理终端、至少一第一线光源以及至少一第二线光源。载物平台上设有测量区域,被测物体置于测量区域内。第一线光源和第二线光源分别用于向被测物体投射第一光源线和第二光源线,且第一线光源沿第二光源线的方向排列,第二线光源沿第一光源线的方向排列。图像采集终端用于采集第一线光源和第二线光源投射在被测物体上的投影图像,且第一线光源和第二线光源与图像采集终端的光轴之间分别具有第一预设角度和第二预设角度。控制处理终端用于根据第一线光源和第二线光源与图
蜂窝芯表面轮廓测量方法.pdf
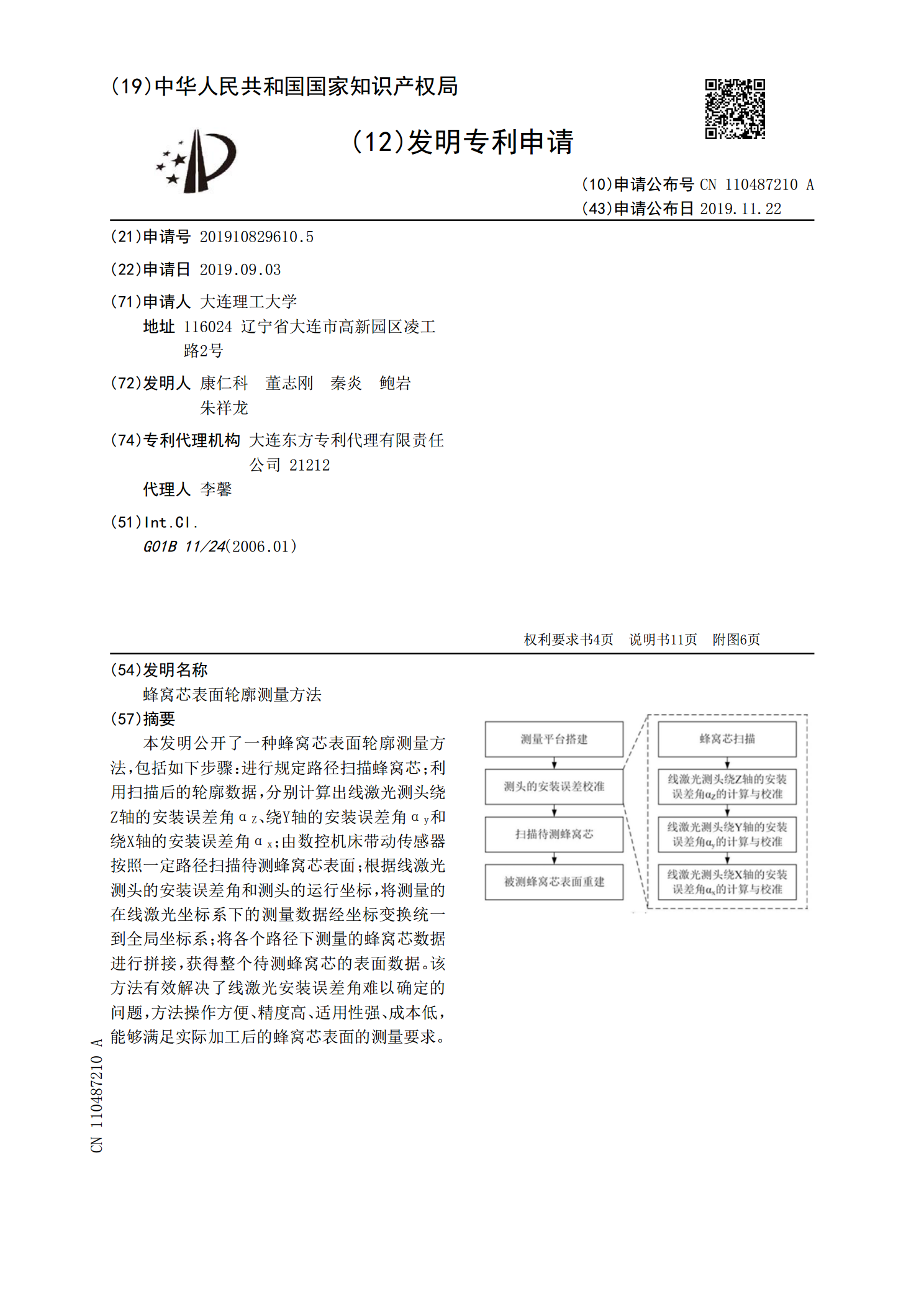
本发明公开了一种蜂窝芯表面轮廓测量方法,包括如下步骤:进行规定路径扫描蜂窝芯;利用扫描后的轮廓数据,分别计算出线激光测头绕Z轴的安装误差角α