
车轮速度推定装置.pdf

努力****南绿

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车轮速度推定装置.pdf
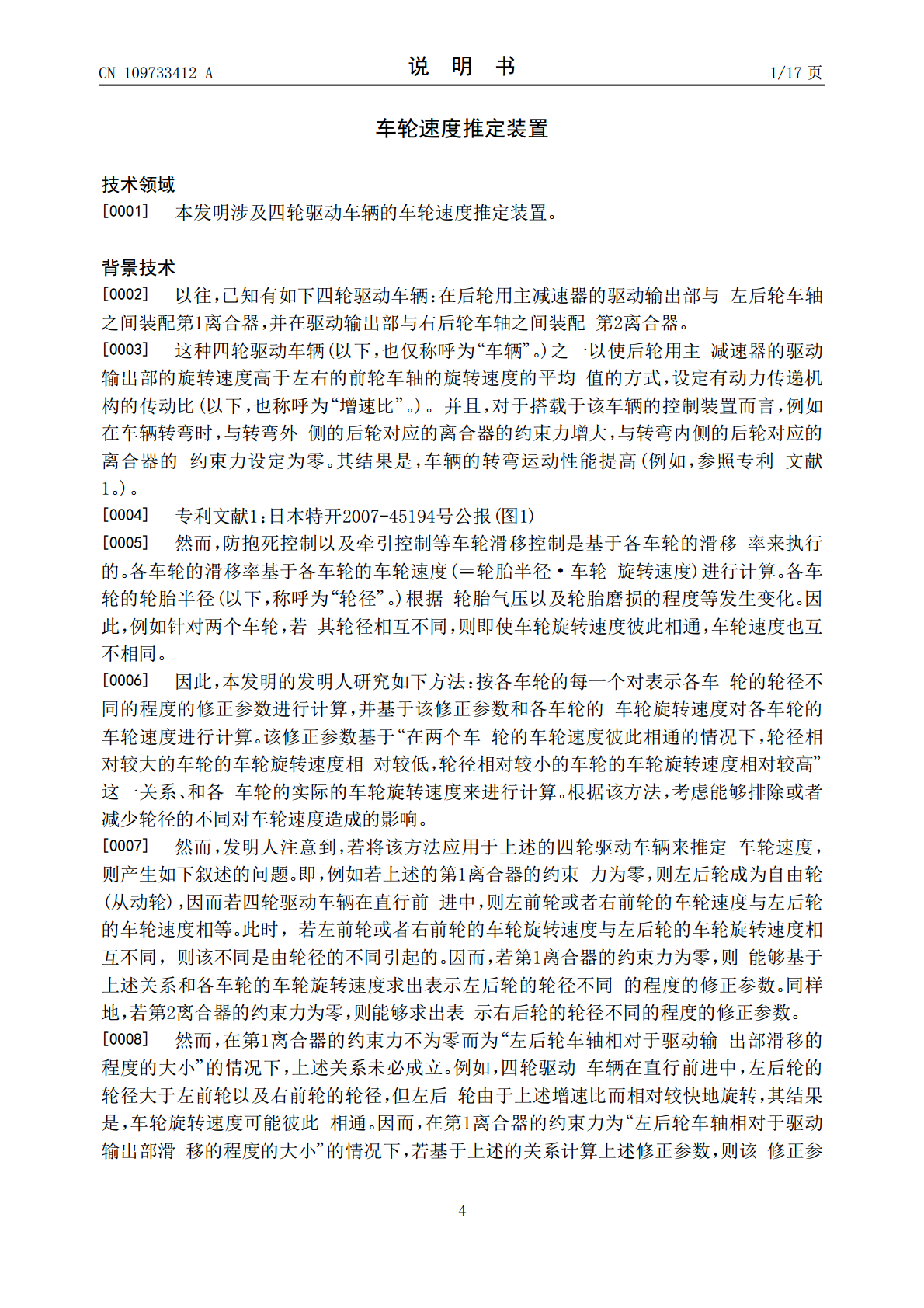
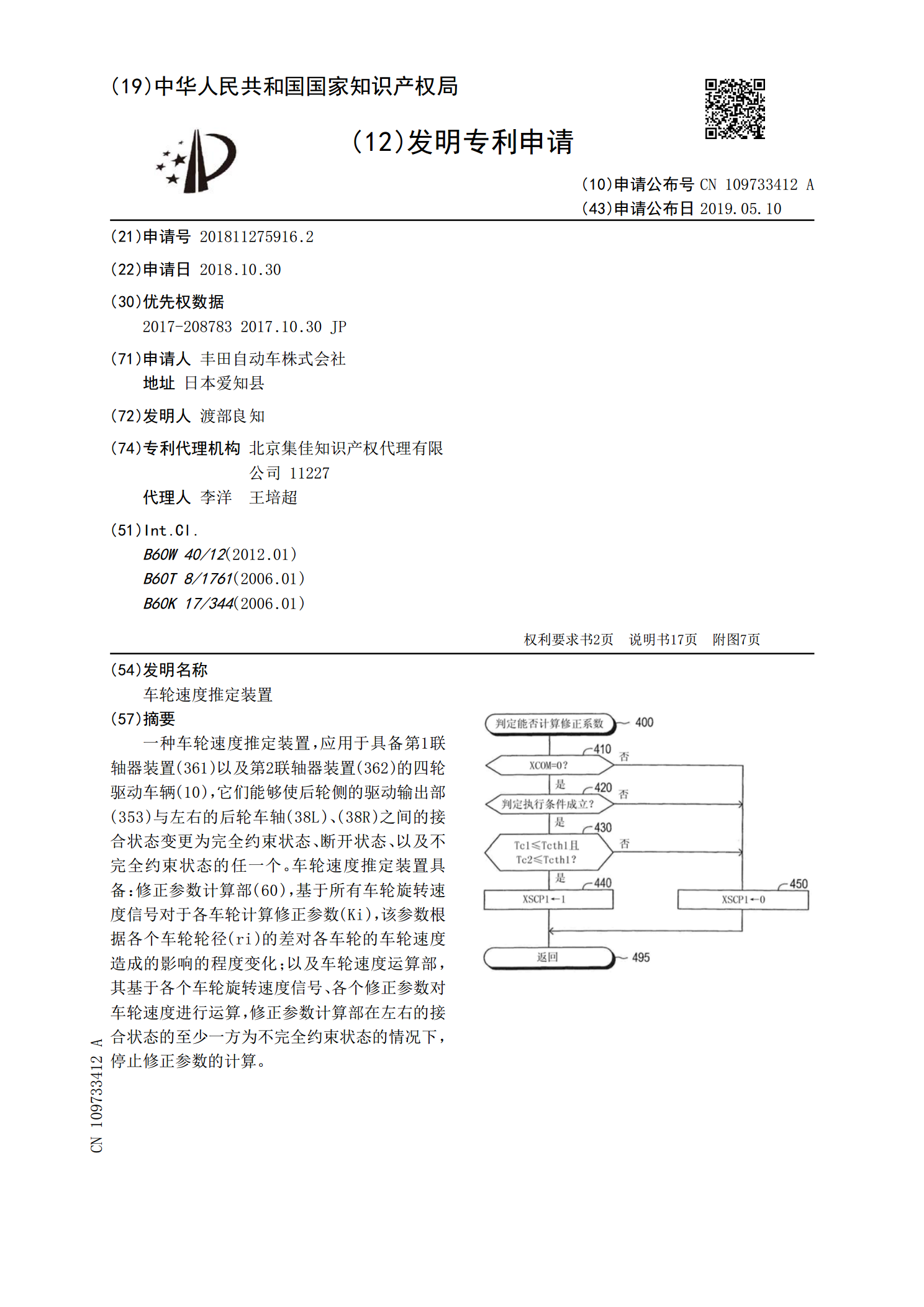
一种车轮速度推定装置,应用于具备第1联轴器装置(361)以及第2联轴器装置(362)的四轮驱动车辆(10),它们能够使后轮侧的驱动输出部(353)与左右的后轮车轴(38L)、(38R)之间的接合状态变更为完全约束状态、断开状态、以及不完全约束状态的任一个。车轮速度推定装置具备:修正参数计算部(60),基于所有车轮旋转速度信号对于各车轮计算修正参数(Ki),该参数根据各个车轮轮径(ri)的差对各车轮的车轮速度造成的影响的程度变化;以及车轮速度运算部,其基于各个车轮旋转速度信号、各个修正参数对车轮速度进行运算
车轮速度检测装置.pdf
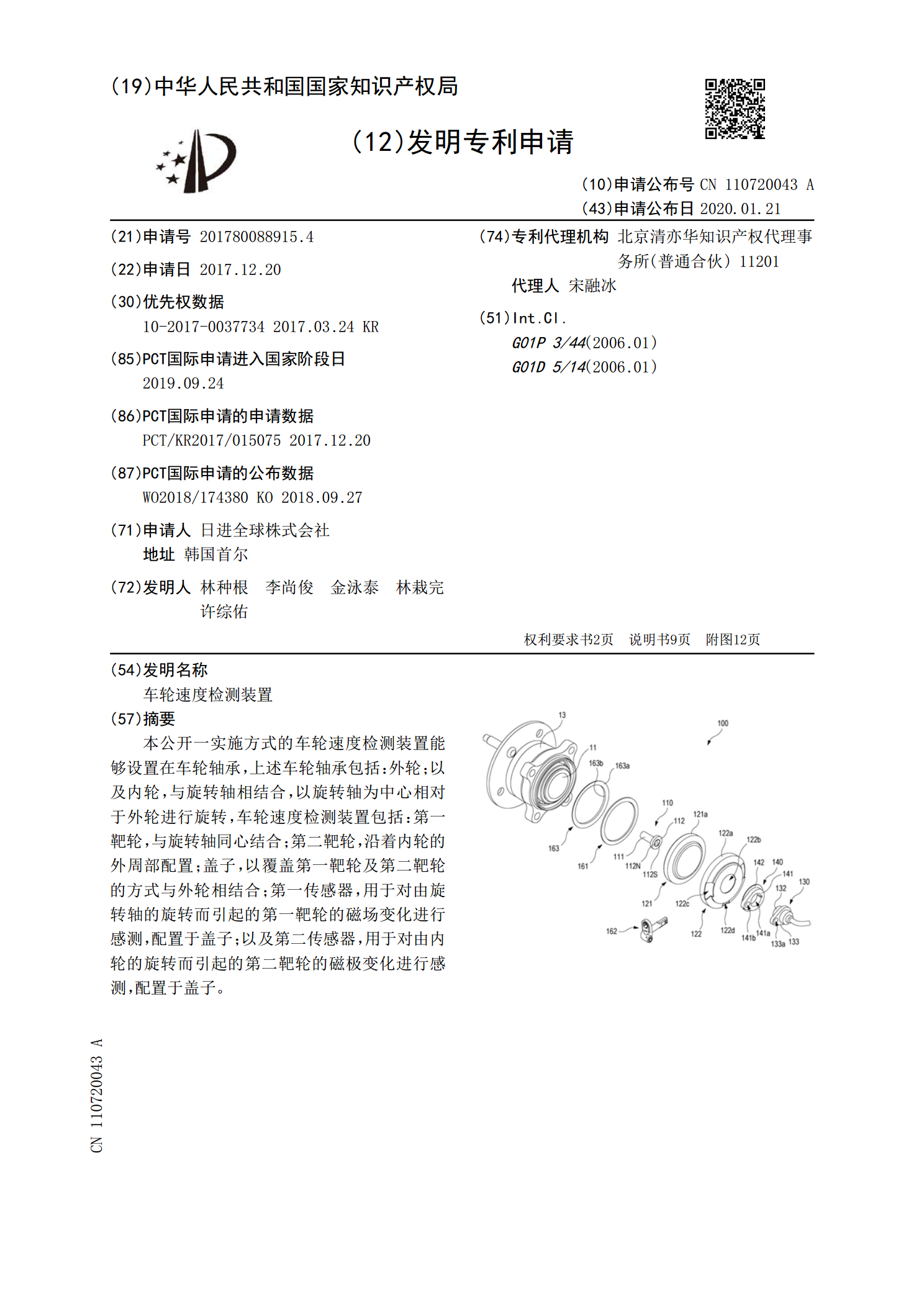
本公开一实施方式的车轮速度检测装置能够设置在车轮轴承,上述车轮轴承包括:外轮;以及内轮,与旋转轴相结合,以旋转轴为中心相对于外轮进行旋转,车轮速度检测装置包括:第一靶轮,与旋转轴同心结合;第二靶轮,沿着内轮的外周部配置;盖子,以覆盖第一靶轮及第二靶轮的方式与外轮相结合;第一传感器,用于对由旋转轴的旋转而引起的第一靶轮的磁场变化进行感测,配置于盖子;以及第二传感器,用于对由内轮的旋转而引起的第二靶轮的磁极变化进行感测,配置于盖子。

车轮速度检测装置.pdf
本发明提供一种采取了应对泥水侵入的对策的车轮速度检测装置。在轮轴(12)的靠传感器(17)侧的端部上且在外周(21)上设置环状凹槽(22)。另外,从传感器支承部件(18)延伸出杯状的凸缘部(23),该凸缘部(23)保持其与轮轴(12)的端部的外周(21)之间的规定间隙(T1)且覆盖环状凹槽(22)。虽然泥水通过形成在凸缘部与轮轴的外周之间的间隙(T1)并朝向多极磁环(15),但通过减小间隙(T1),能良好地防止泥水的侵入。而且侵入的泥水会积存在环状凹部(22)中。

推定加速度计算装置.pdf
提供一种推定加速度计算装置。该装置包括计算对应于起伏道路水平或车辆的转向水平的滚动阻力系数的滚动阻力系数计算单元;和基于运动方程式计算推定加速度的推定加速度计算单元,该运动方程式表达车轮力的平衡并含有滚动阻力系数项。
车轮的偏滑角推定装置及其方法.pdf
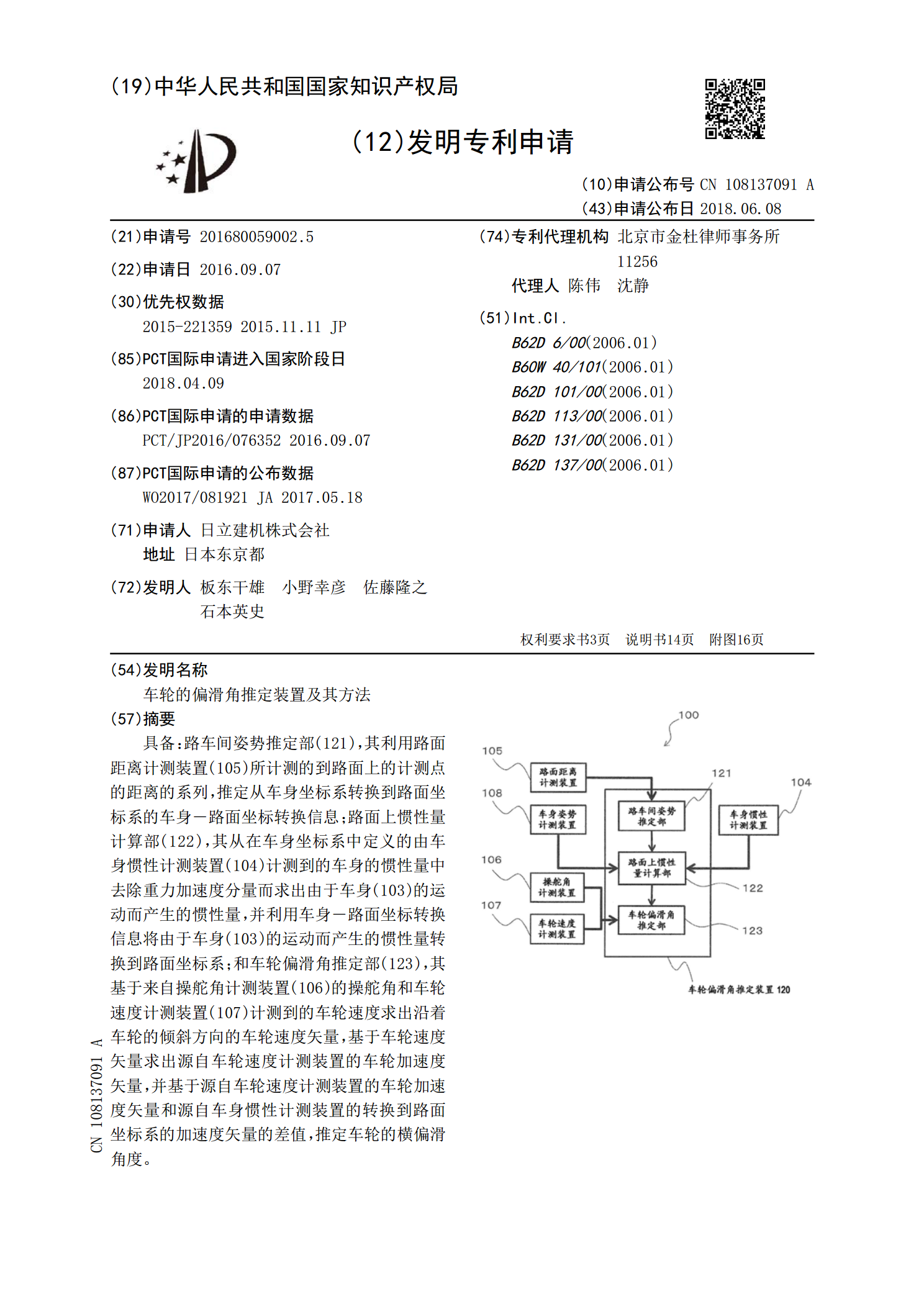
具备:路车间姿势推定部(121),其利用路面距离计测装置(105)所计测的到路面上的计测点的距离的系列,推定从车身坐标系转换到路面坐标系的车身―路面坐标转换信息;路面上惯性量计算部(122),其从在车身坐标系中定义的由车身惯性计测装置(104)计测到的车身的惯性量中去除重力加速度分量而求出由于车身(103)的运动而产生的惯性量,并利用车身―路面坐标转换信息将由于车身(103)的运动而产生的惯性量转换到路面坐标系;和车轮偏滑角推定部(123),其基于来自操舵角计测装置(106)的操舵角和车轮速度计测装置(1