
一种轮毂驱动智能车辆换道控制系统及方法.pdf

沛芹****ng

1/8
2/8
3/8

4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮毂驱动智能车辆换道控制系统及方法.pdf
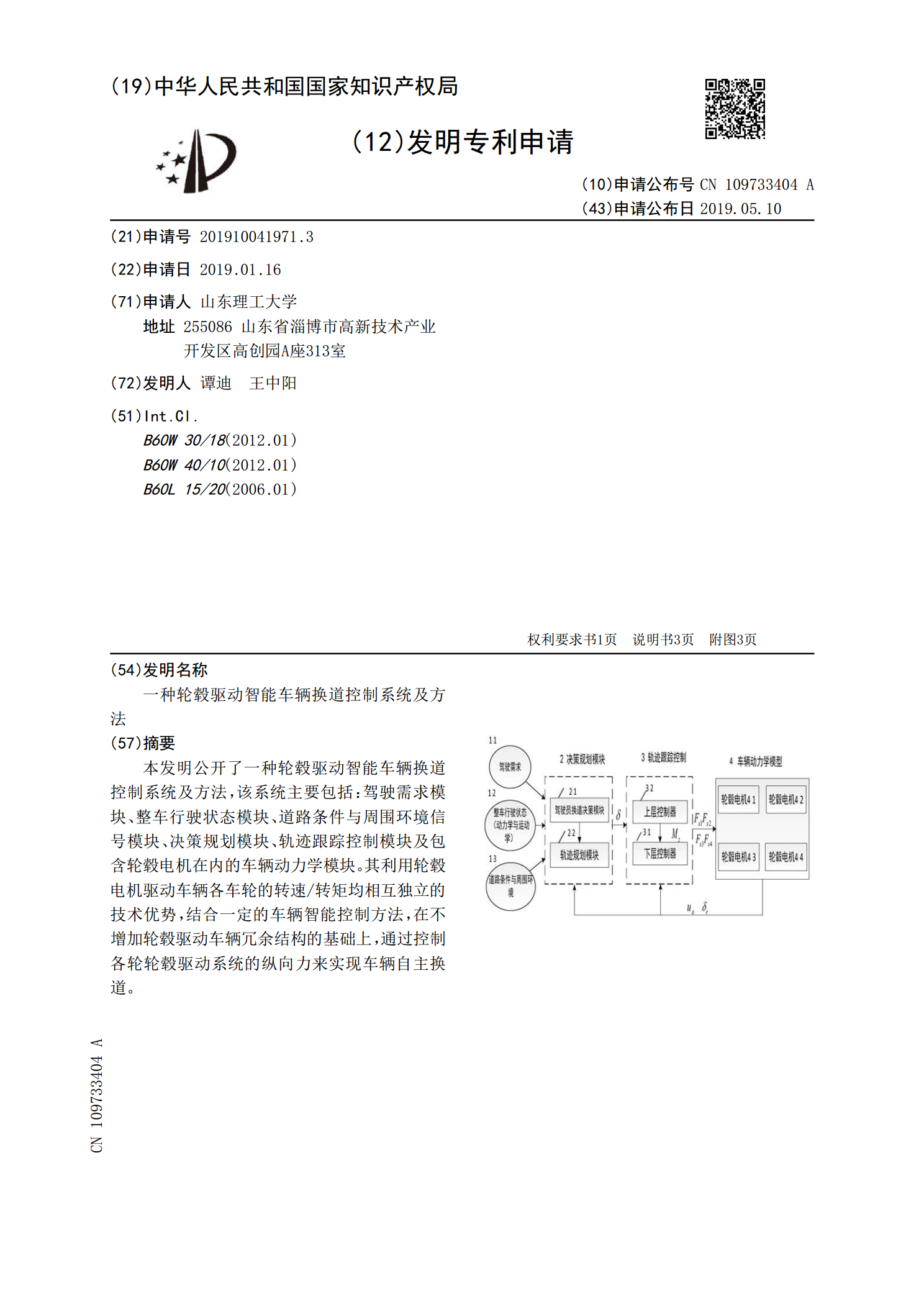
本发明公开了一种轮毂驱动智能车辆换道控制系统及方法,该系统主要包括:驾驶需求模块、整车行驶状态模块、道路条件与周围环境信号模块、决策规划模块、轨迹跟踪控制模块及包含轮毂电机在内的车辆动力学模块。其利用轮毂电机驱动车辆各车轮的转速/转矩均相互独立的技术优势,结合一定的车辆智能控制方法,在不增加轮毂驱动车辆冗余结构的基础上,通过控制各轮轮毂驱动系统的纵向力来实现车辆自主换道。

一种基于轮毂电机驱动的车辆换道防碰撞控制方法及装置.pdf
本发明公开了一种基于轮毂电机驱动的车辆换道防碰撞控制方法,通过方向盘转角大小、本车速度V1在本车的横向坐标的分量方向与临道后方车辆相对于本车的横向坐标方向以及本车速度V1、临道后方车辆纵向距离Y、临道后方车辆的速度V2间关系判断碰撞场景,当判断为将发送碰撞时,由两侧轮毂电机分别施加前进力矩和制动力矩,直至方向盘回正后,由两侧轮毂电机共同施加前进力矩。本发明还公开了基于轮毂电机驱动的车辆换道防碰撞控制装置。本发明加快了碰撞的判断并进行修正干预,同时保证了修正措施安全可控。
用于车辆的轮毂驱动装置及轮毂驱动车辆.pdf
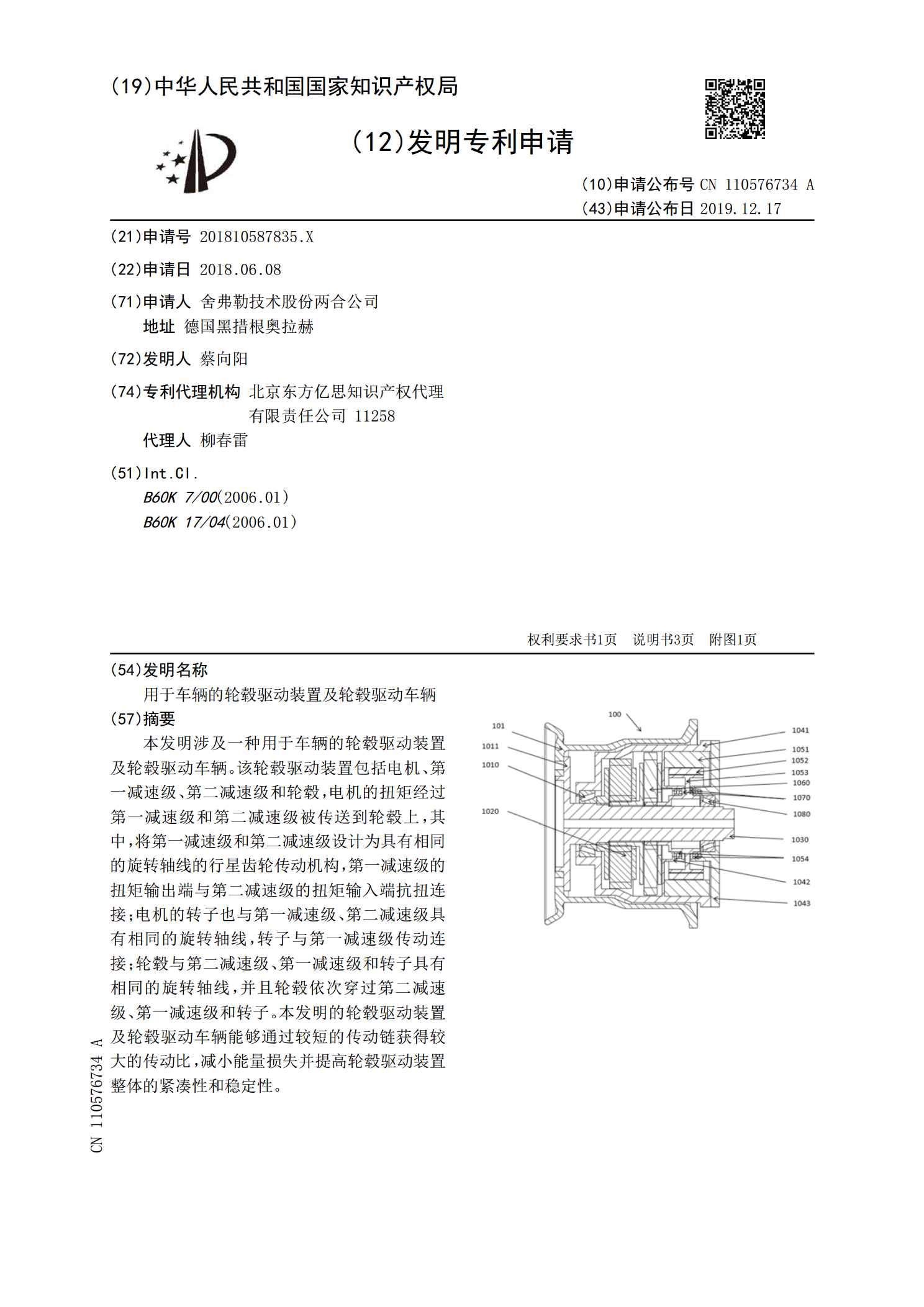
本发明涉及一种用于车辆的轮毂驱动装置及轮毂驱动车辆。该轮毂驱动装置包括电机、第一减速级、第二减速级和轮毂,电机的扭矩经过第一减速级和第二减速级被传送到轮毂上,其中,将第一减速级和第二减速级设计为具有相同的旋转轴线的行星齿轮传动机构,第一减速级的扭矩输出端与第二减速级的扭矩输入端抗扭连接;电机的转子也与第一减速级、第二减速级具有相同的旋转轴线,转子与第一减速级传动连接;轮毂与第二减速级、第一减速级和转子具有相同的旋转轴线,并且轮毂依次穿过第二减速级、第一减速级和转子。本发明的轮毂驱动装置及轮毂驱动车辆能够通

用于车辆的轮毂驱动装置及轮毂驱动车辆.pdf
本发明涉及一种用于车辆的轮毂驱动装置及轮毂驱动车辆。该轮毂驱动装置包括电机、第一减速级、第二减速级和轮毂,电机的扭矩经过第一减速级和第二减速级被传送到轮毂上,其中,将第一减速级和第二减速级设计为具有相同的旋转轴线的行星齿轮传动机构,并且第一减速级的扭矩输出端与第二减速级的扭矩输入端抗扭连接;其中,电机的转子也与第一减速级、第二减速级具有相同的旋转轴线,并且转子与第一减速级传动连接。本发明的轮毂驱动装置及轮毂驱动车辆能够通过较短的传动链获得较大的传动比,减小能量损失并提高轮毂驱动装置整体的紧凑性和稳定性。
用于车辆的轮毂驱动装置及轮毂驱动车辆.pdf
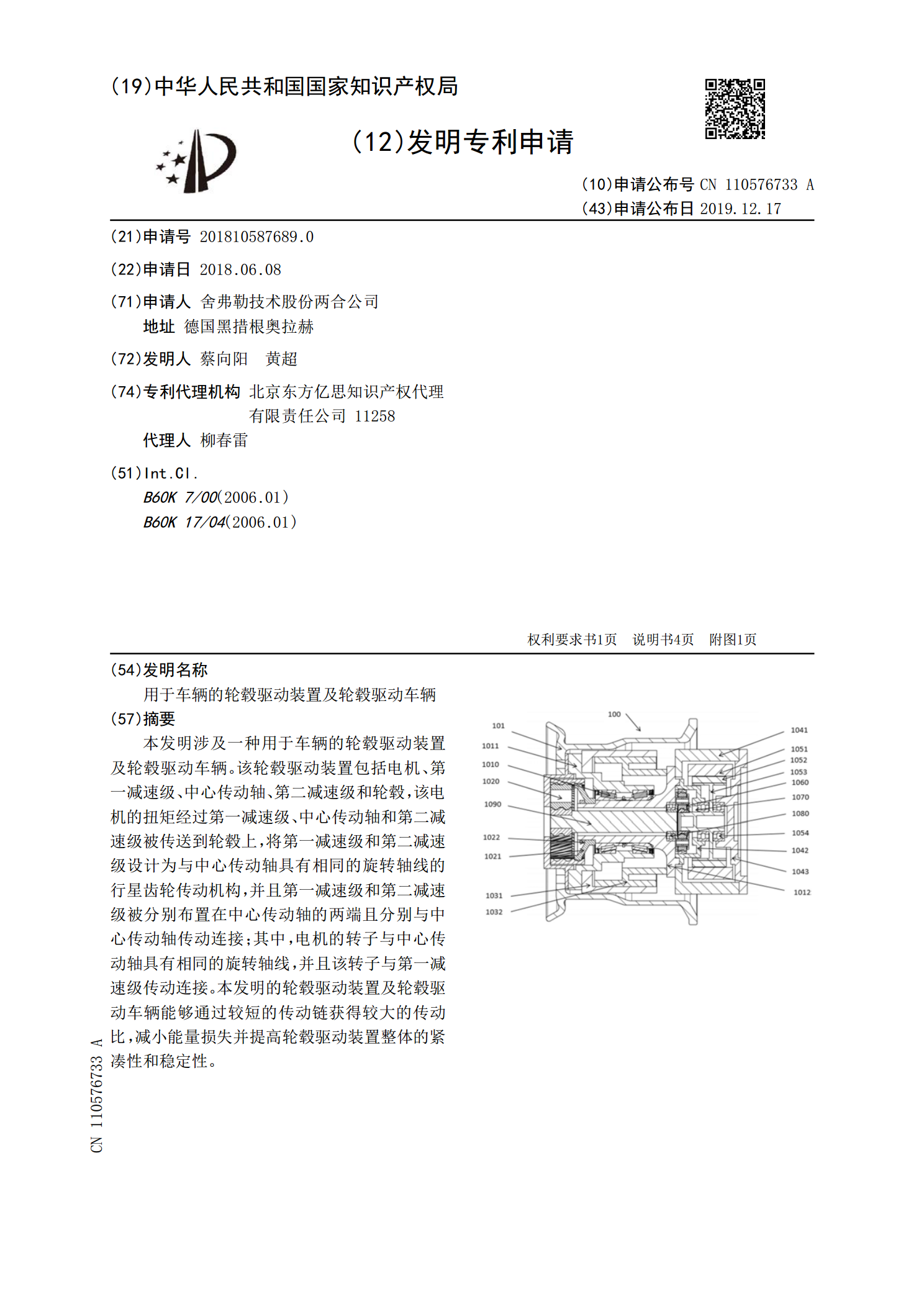
本发明涉及一种用于车辆的轮毂驱动装置及轮毂驱动车辆。该轮毂驱动装置包括电机、第一减速级、中心传动轴、第二减速级和轮毂,该电机的扭矩经过第一减速级、中心传动轴和第二减速级被传送到轮毂上,将第一减速级和第二减速级设计为与中心传动轴具有相同的旋转轴线的行星齿轮传动机构,并且第一减速级和第二减速级被分别布置在中心传动轴的两端且分别与中心传动轴传动连接;其中,电机的转子与中心传动轴具有相同的旋转轴线,并且该转子与第一减速级传动连接。本发明的轮毂驱动装置及轮毂驱动车辆能够通过较短的传动链获得较大的传动比,减小能量损失