
拖车撞刹装置、拖车撞刹方法、及车辆.pdf

运升****魔王

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
拖车撞刹装置、拖车撞刹方法、及车辆.pdf
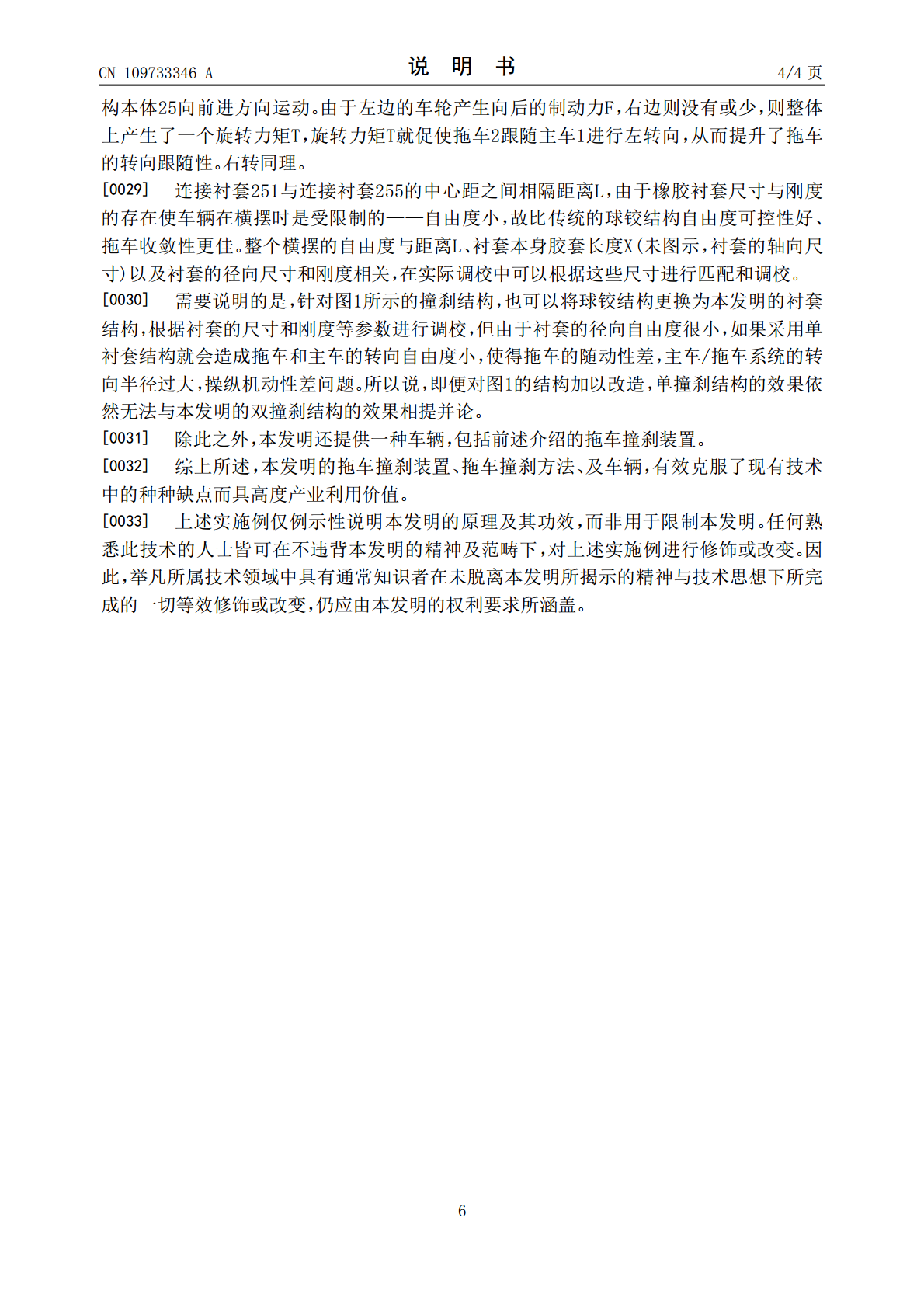
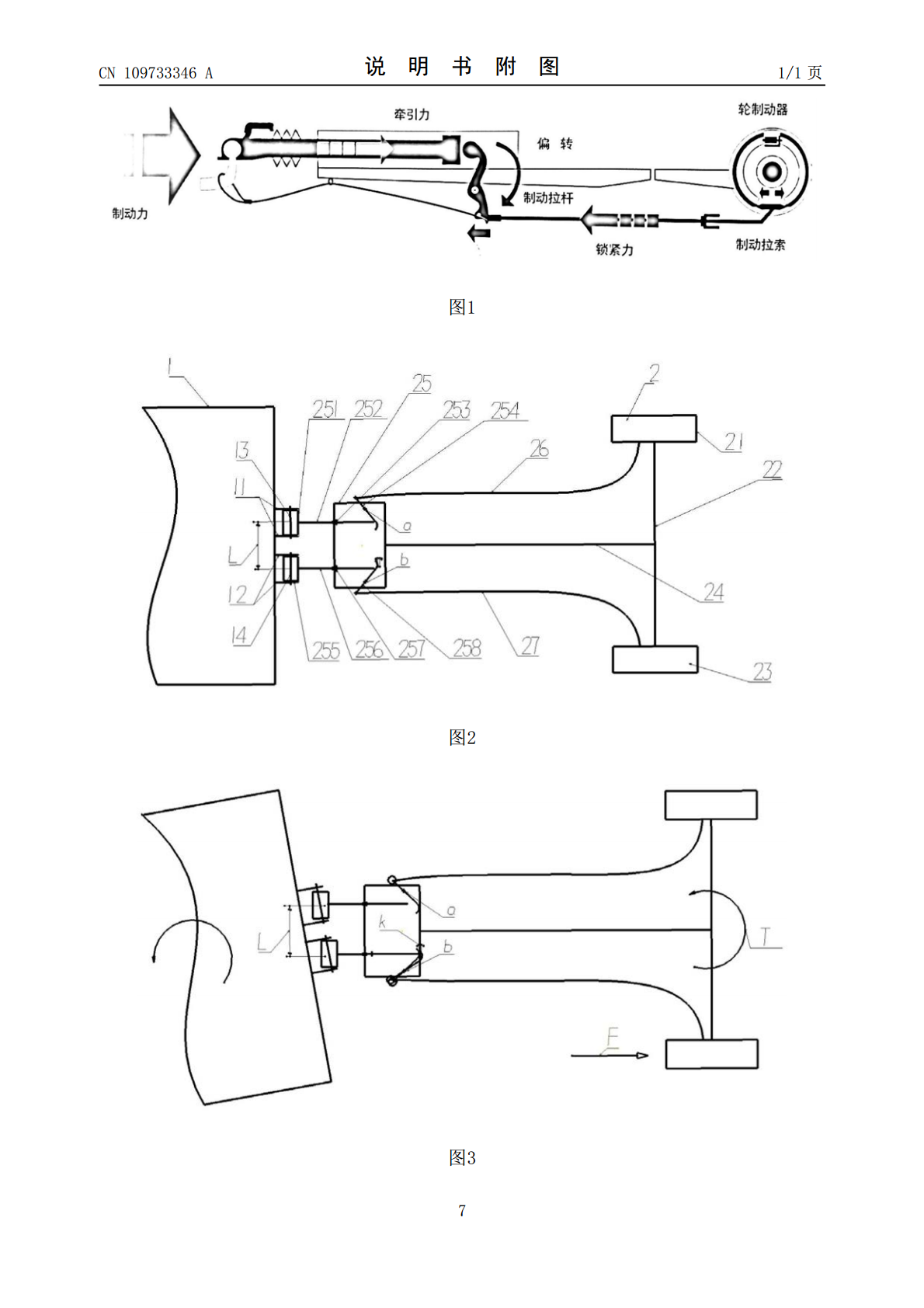
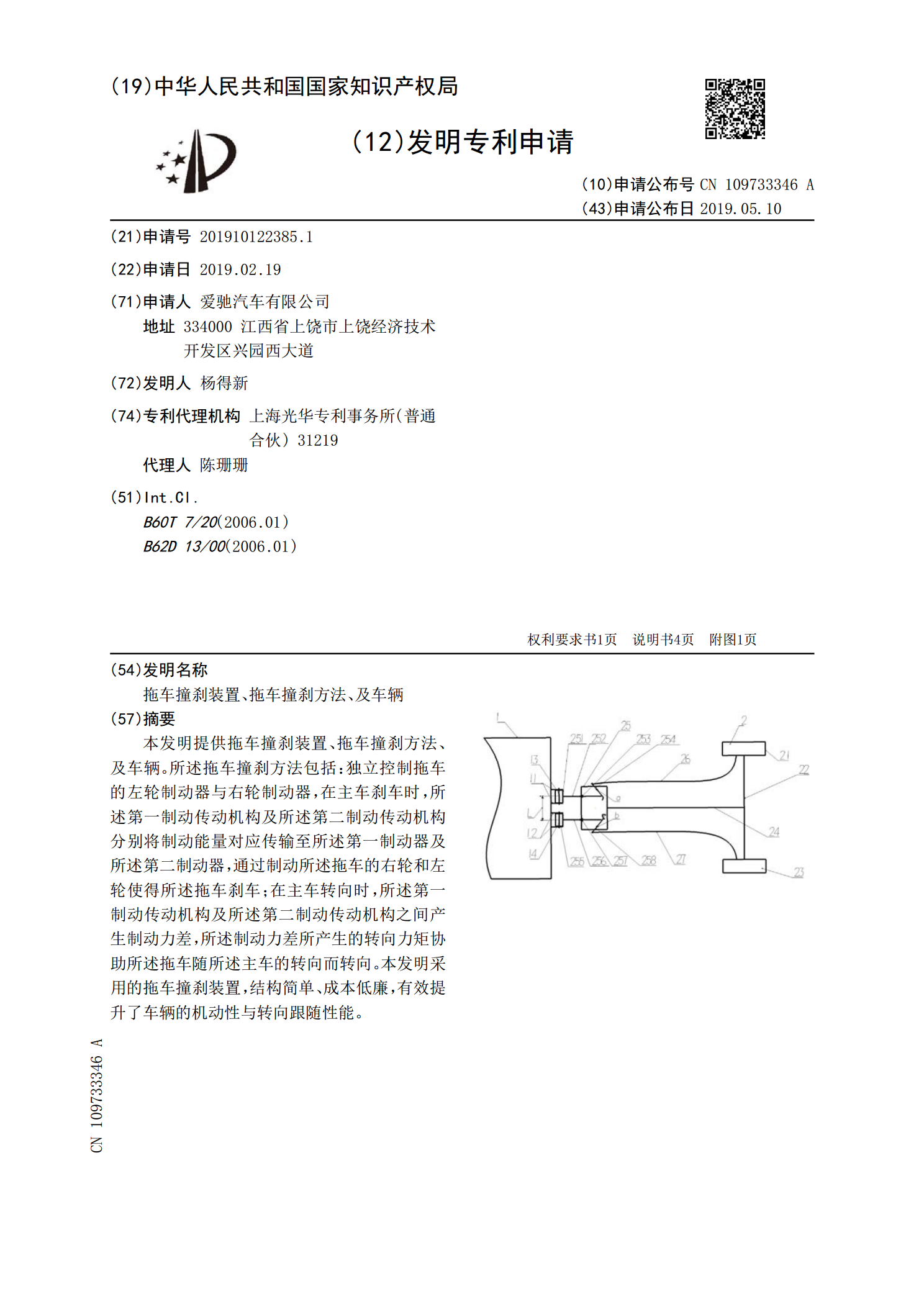
本发明提供拖车撞刹装置、拖车撞刹方法、及车辆。所述拖车撞刹方法包括:独立控制拖车的左轮制动器与右轮制动器,在主车刹车时,所述第一制动传动机构及所述第二制动传动机构分别将制动能量对应传输至所述第一制动器及所述第二制动器,通过制动所述拖车的右轮和左轮使得所述拖车刹车;在主车转向时,所述第一制动传动机构及所述第二制动传动机构之间产生制动力差,所述制动力差所产生的转向力矩协助所述拖车随所述主车的转向而转向。本发明采用的拖车撞刹装置,结构简单、成本低廉,有效提升了车辆的机动性与转向跟随性能。

一种双向同步抱刹的婴儿拖车.pdf
本发明公开了一种双向同步抱刹的婴儿拖车,包括:车架、推柄管和刹车装置,所述车架前方设置有防撞保护管和前轮装置,所述车架后方安装一后轮轴,所述后轮轴两端分别安装有后轮和减震连接件,所述减震连接件的一端连接有减震器,所述减震器的下端与车架连接,所述后轮内侧的中心设置有一刹车盘;所述刹车装置包括刹车手柄、刹车线和刹车盘,所述刹车线连接刹车盘和刹车手柄,所述刹车手柄安装在推柄管上,所述刹车盘安装在后轮轴的两端。通过上述方式,本发明双向同步抱刹的婴儿拖车能够控制两轮同时刹车,停止更平稳,更安全。

一种一踩双刹式紧急制动婴儿拖车.pdf
本发明公开了一种一踩双刹式紧急制动婴儿拖车,包括:车架、前轮装置、刹车装置和拖杆机构,所述刹车装置包括刹车铁支、防后倾支架、刹车连接件、连接片和刹车管,所述刹车管的中部设置有一脚踏,所述防后倾支架设置在车架后端中部,所述刹车连接件分别安装在刹车管的两端,所述刹车铁支的一端通过连接片与刹车连接件连接,所述刹车铁支的另一端插入车架下方的车轮刹车盘中。通过上述方式,本发明一踩双刹式紧急制动婴儿拖车使用方便,性能优越,当刹车时两轮同时刹车,停止更平稳,更安全。
拖车支架装置和车辆.pdf
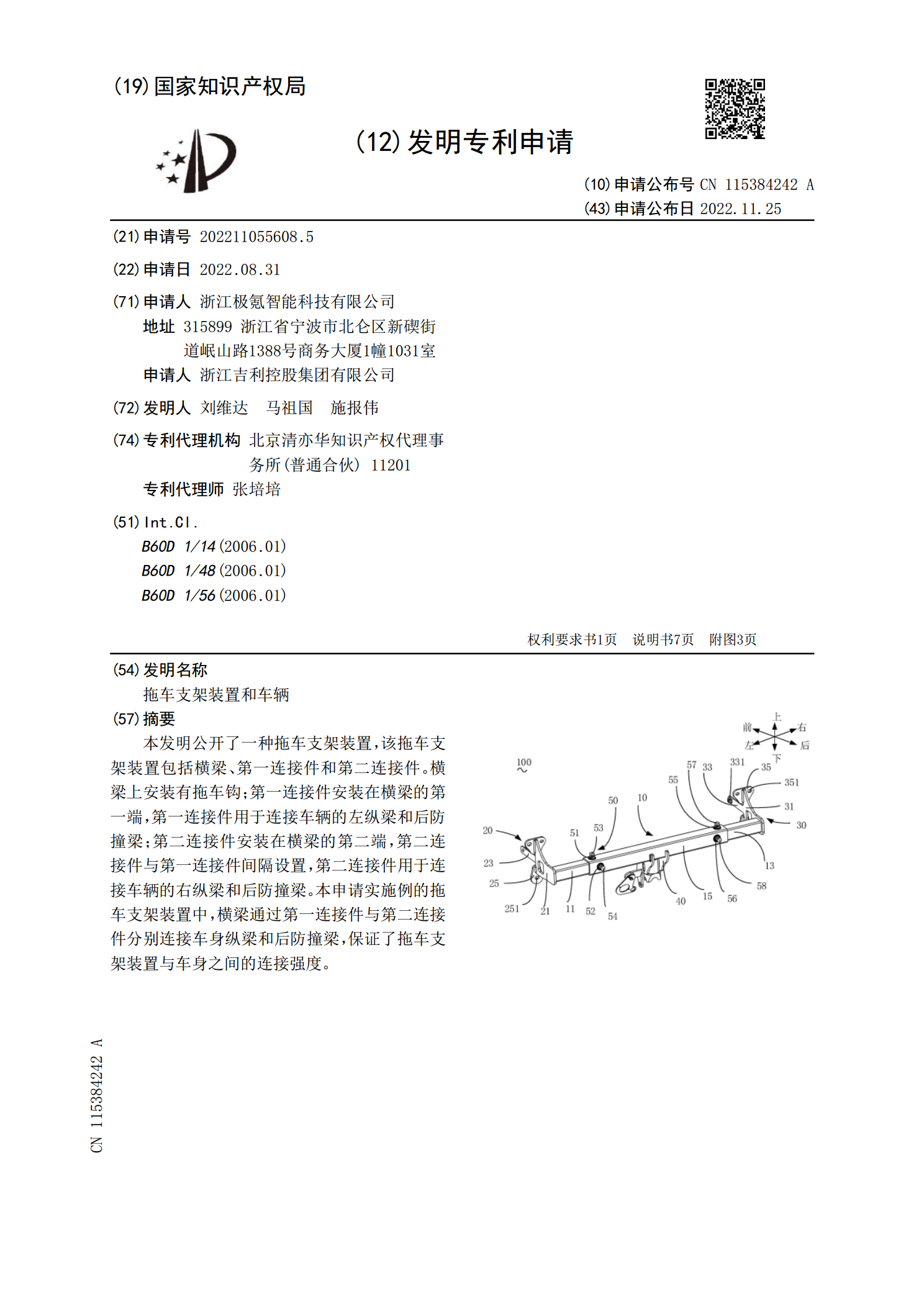
本发明公开了一种拖车支架装置,该拖车支架装置包括横梁、第一连接件和第二连接件。横梁上安装有拖车钩;第一连接件安装在横梁的第一端,第一连接件用于连接车辆的左纵梁和后防撞梁;第二连接件安装在横梁的第二端,第二连接件与第一连接件间隔设置,第二连接件用于连接车辆的右纵梁和后防撞梁。本申请实施例的拖车支架装置中,横梁通过第一连接件与第二连接件分别连接车身纵梁和后防撞梁,保证了拖车支架装置与车身之间的连接强度。
拖车倒车方法、装置、系统、介质和车辆.pdf
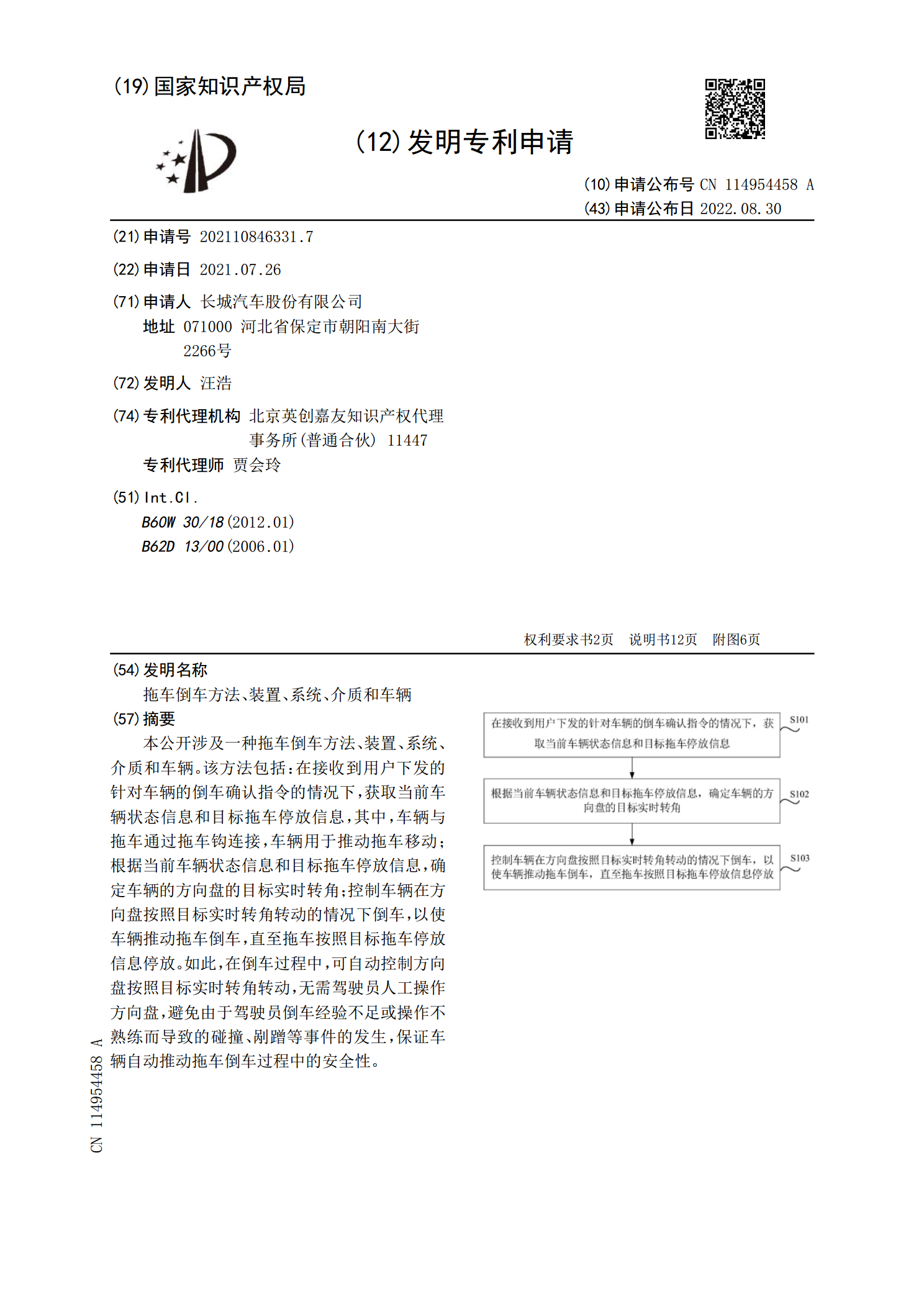
本公开涉及一种拖车倒车方法、装置、系统、介质和车辆。该方法包括:在接收到用户下发的针对车辆的倒车确认指令的情况下,获取当前车辆状态信息和目标拖车停放信息,其中,车辆与拖车通过拖车钩连接,车辆用于推动拖车移动;根据当前车辆状态信息和目标拖车停放信息,确定车辆的方向盘的目标实时转角;控制车辆在方向盘按照目标实时转角转动的情况下倒车,以使车辆推动拖车倒车,直至拖车按照目标拖车停放信息停放。如此,在倒车过程中,可自动控制方向盘按照目标实时转角转动,无需驾驶员人工操作方向盘,避免由于驾驶员倒车经验不足或操作不熟练而