
一种开关磁阻轮毂电机预测控制方法.pdf

fa****楠吖


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种开关磁阻轮毂电机预测控制方法.pdf
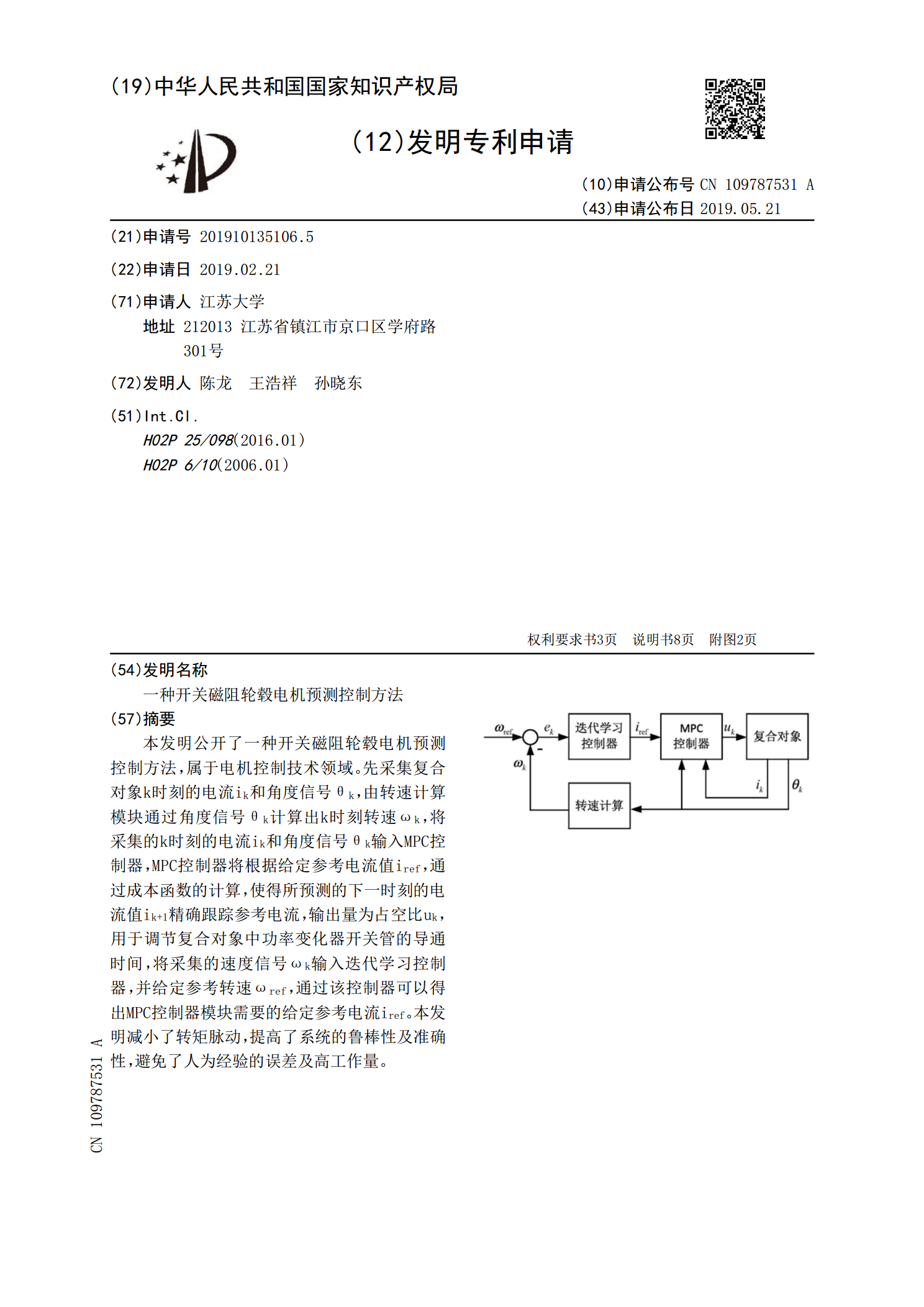
本发明公开了一种开关磁阻轮毂电机预测控制方法,属于电机控制技术领域。先采集复合对象k时刻的电流i

一种开关磁阻轮毂电机无位置预测控制方法.pdf
本发明公开了一种开关磁阻轮毂电机无位置预测控制方法,属于电机控制技术领域。先采集复合对象k时刻的电流i
一种开关磁阻轮毂电机及其运行方法.pdf
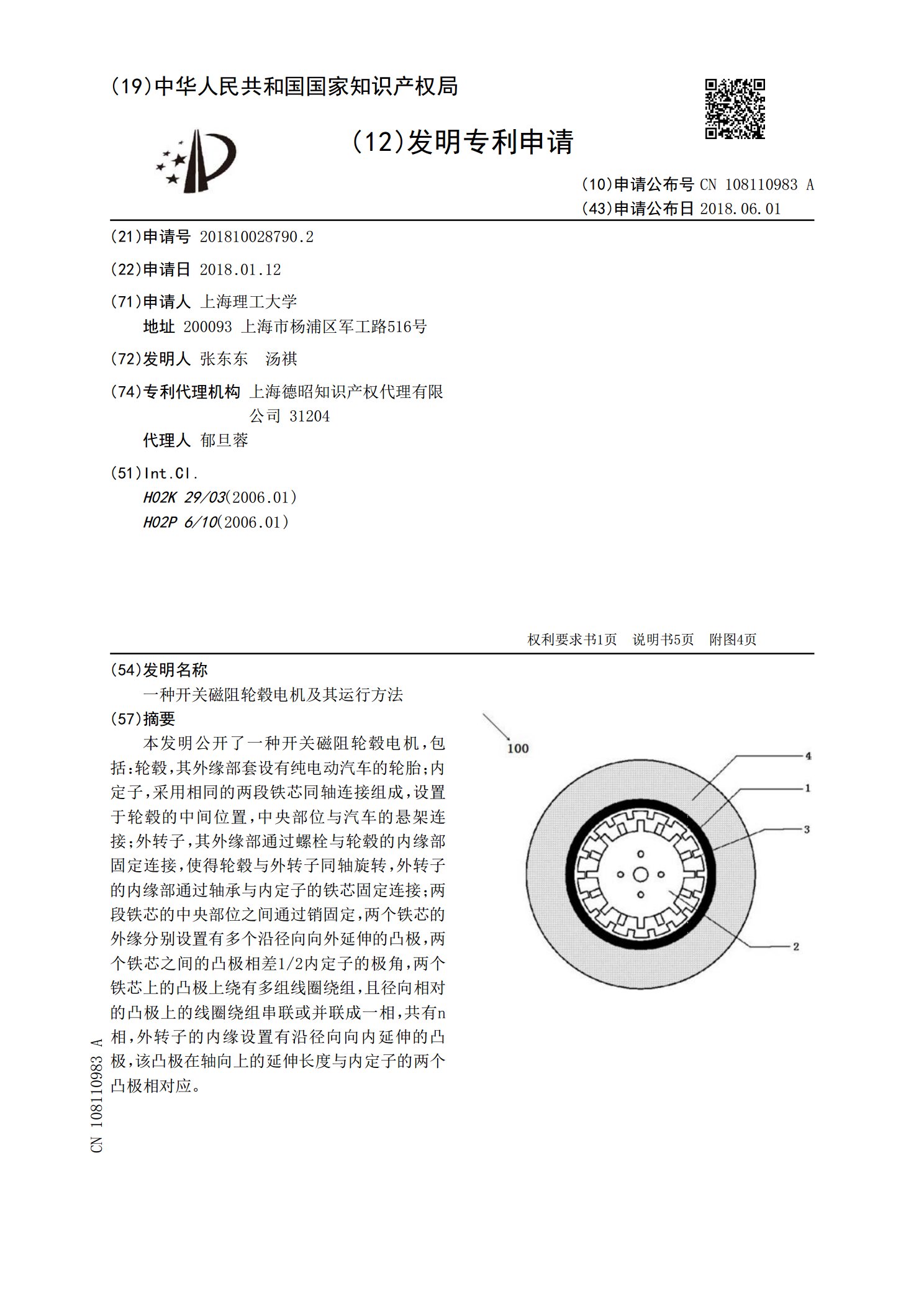
本发明公开了一种开关磁阻轮毂电机,包括:轮毂,其外缘部套设有纯电动汽车的轮胎;内定子,采用相同的两段铁芯同轴连接组成,设置于轮毂的中间位置,中央部位与汽车的悬架连接;外转子,其外缘部通过螺栓与轮毂的内缘部固定连接,使得轮毂与外转子同轴旋转,外转子的内缘部通过轴承与内定子的铁芯固定连接;两段铁芯的中央部位之间通过销固定,两个铁芯的外缘分别设置有多个沿径向向外延伸的凸极,两个铁芯之间的凸极相差1/2内定子的极角,两个铁芯上的凸极上绕有多组线圈绕组,且径向相对的凸极上的线圈绕组串联或并联成一相,共有n相,外转子
一种外转子开关磁阻轮毂电机.pdf
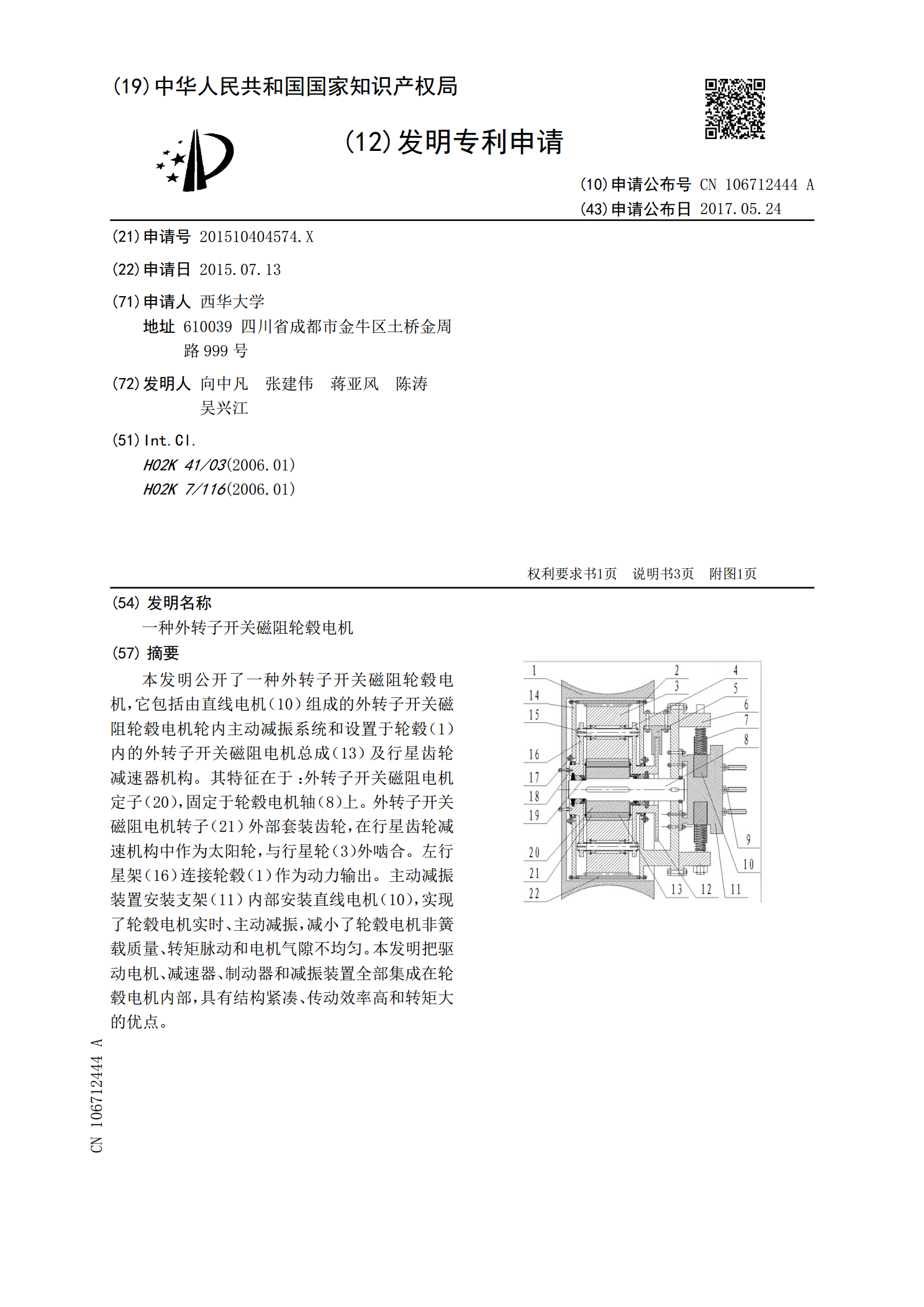
本发明公开了一种外转子开关磁阻轮毂电机,它包括由直线电机(10)组成的外转子开关磁阻轮毂电机轮内主动减振系统和设置于轮毂(1)内的外转子开关磁阻电机总成(13)及行星齿轮减速器机构。其特征在于:外转子开关磁阻电机定子(20),固定于轮毂电机轴(8)上。外转子开关磁阻电机转子(21)外部套装齿轮,在行星齿轮减速机构中作为太阳轮,与行星轮(3)外啮合。左行星架(16)连接轮毂(1)作为动力输出。主动减振装置安装支架(11)内部安装直线电机(10),实现了轮毂电机实时、主动减振,减小了轮毂电机非簧载质量、转矩脉
一种减振开关磁阻轮毂电机.pdf
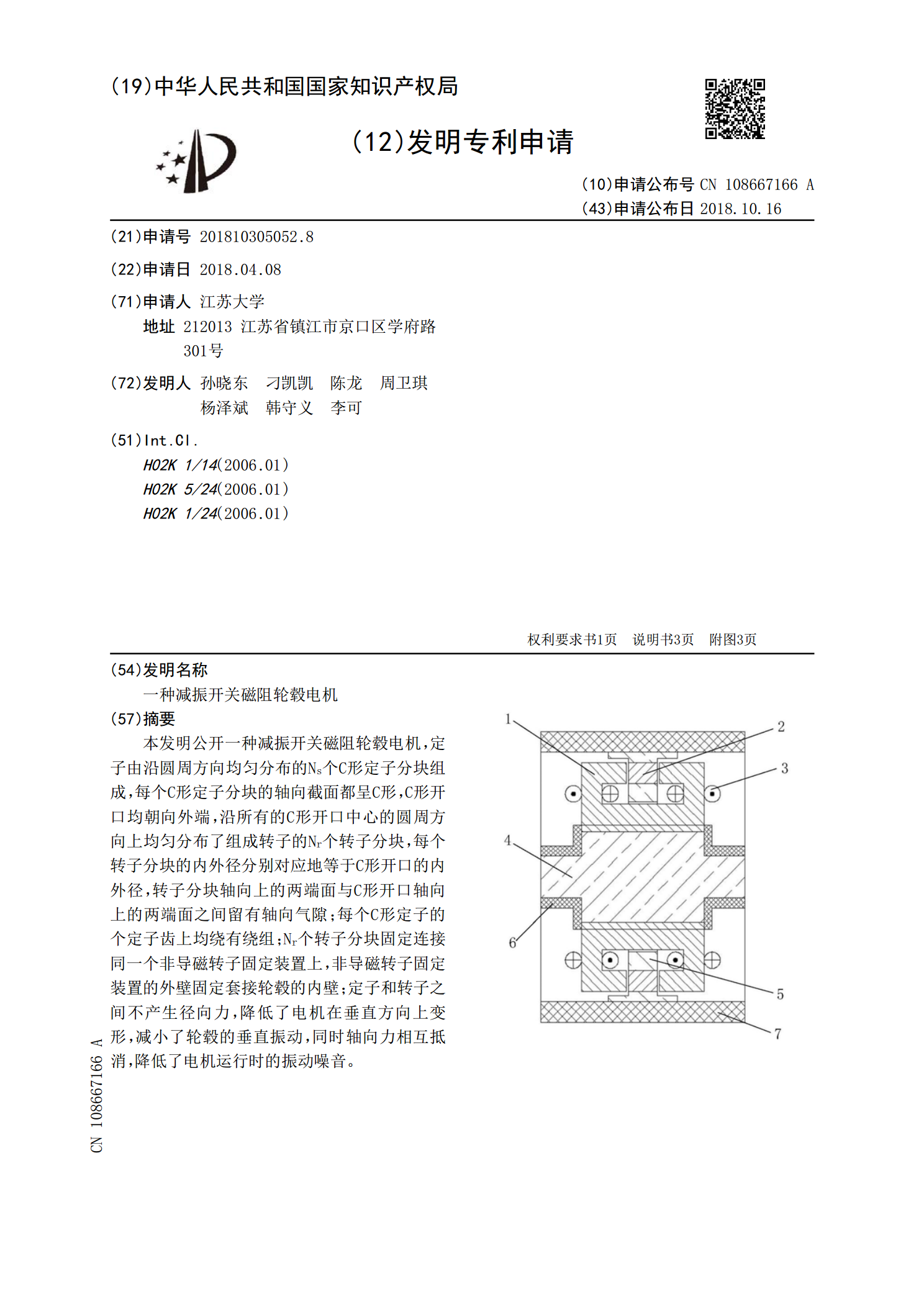
本发明公开一种减振开关磁阻轮毂电机,定子由沿圆周方向均匀分布的N