
一种开关磁阻轮毂电机无位置预测控制方法.pdf

一条****然后

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种开关磁阻轮毂电机无位置预测控制方法.pdf
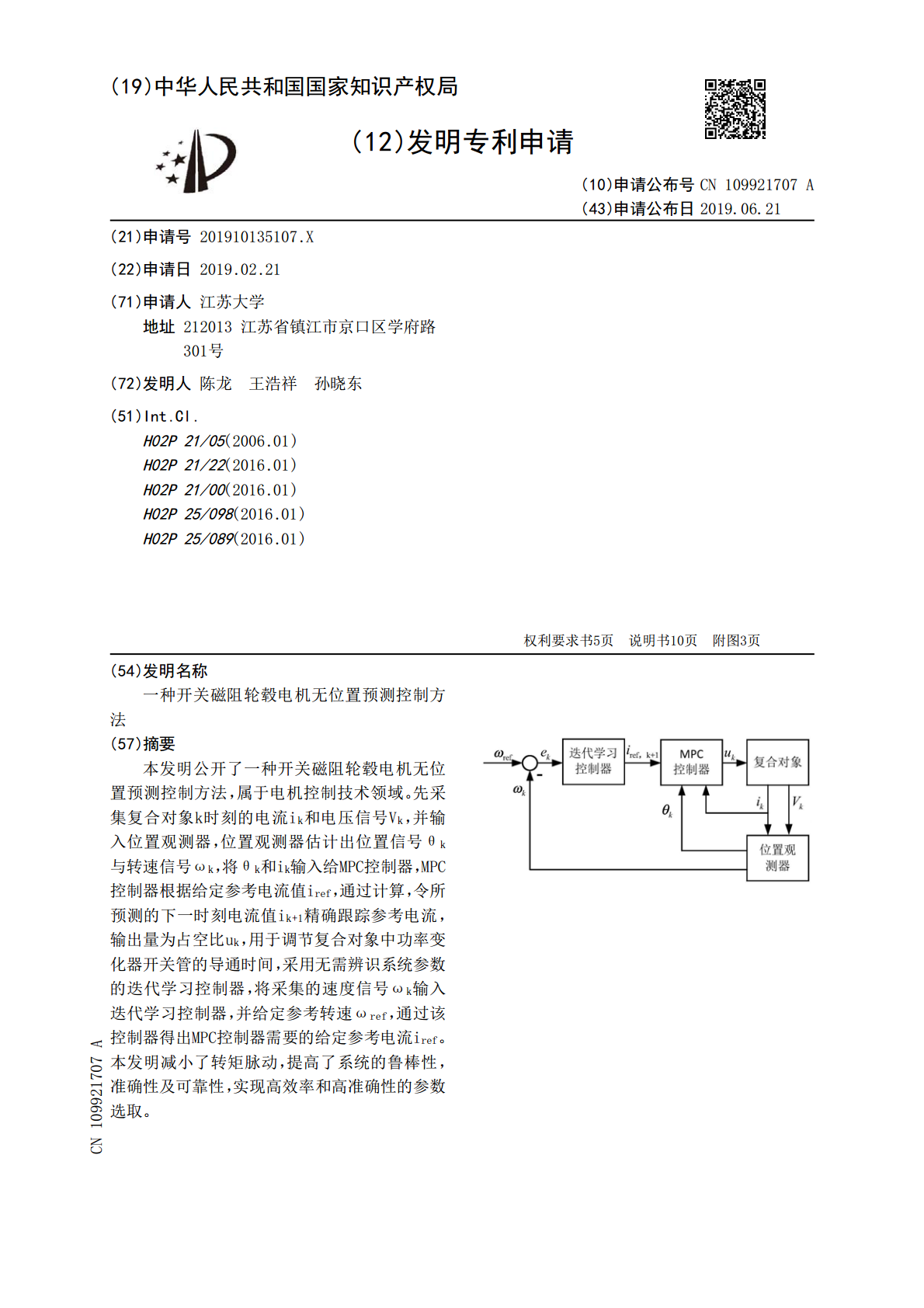
本发明公开了一种开关磁阻轮毂电机无位置预测控制方法,属于电机控制技术领域。先采集复合对象k时刻的电流i
一种开关磁阻轮毂电机预测控制方法.pdf
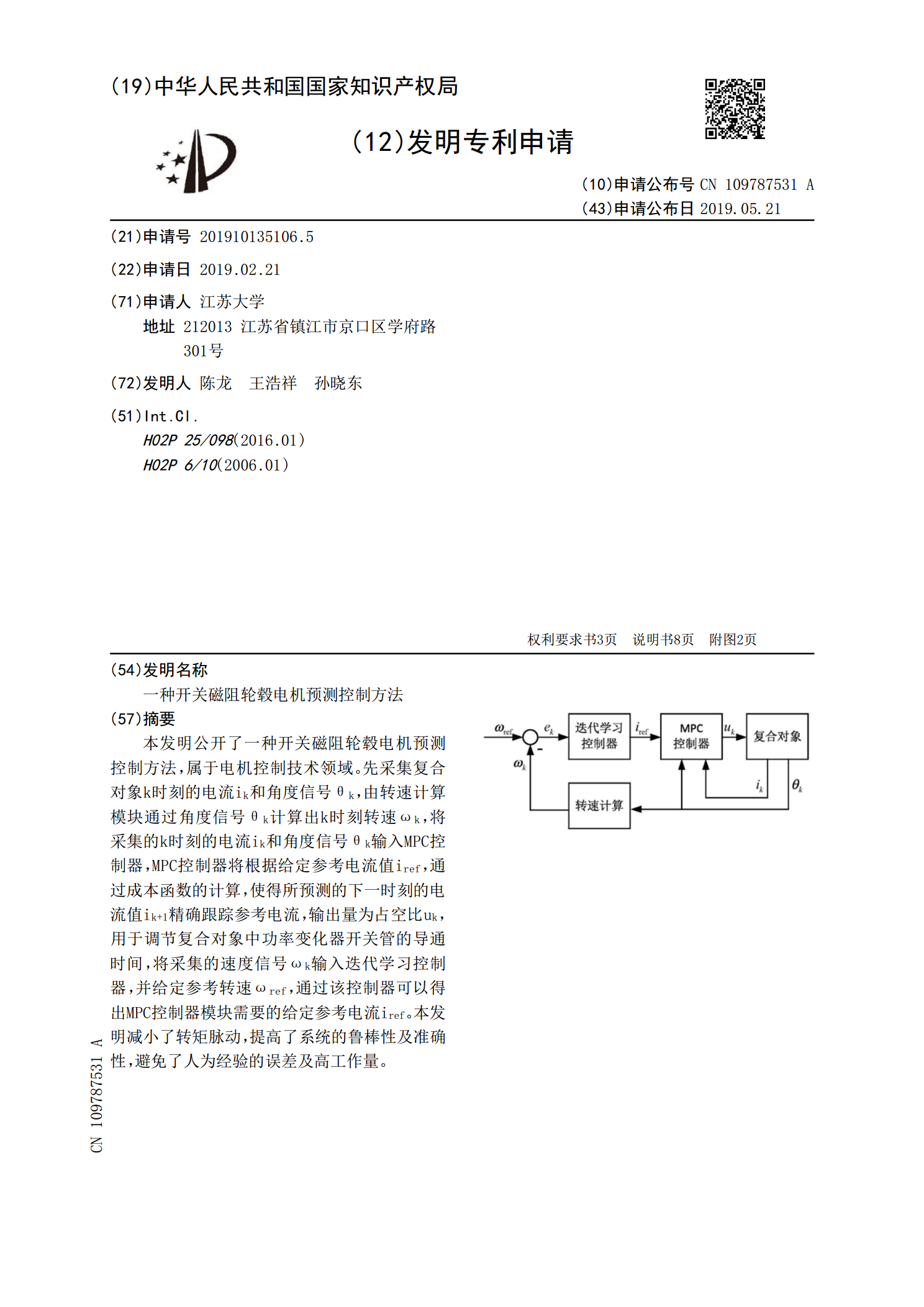
本发明公开了一种开关磁阻轮毂电机预测控制方法,属于电机控制技术领域。先采集复合对象k时刻的电流i

无位置传感器开关磁阻电机的简单控制方法.docx
无位置传感器开关磁阻电机的简单控制方法一、引言在电机控制中,位置传感器是非常重要的组成部分,它可用于精确定位电机转子的位置。但由于位置传感器成本昂贵,安装位置复杂,维护困难等问题,无位置传感器开关磁阻电机成为研究热点。无位置传感器开关磁阻电机在电机控制中应用广泛,本文将介绍其控制方法。二、开关磁阻电机开关磁阻电机是一种步进电机,没有永磁体,转子是由磁性材料制成的,磁性材料中的磁场分别受到磁极和励磁线圈的作用而发生变化,驱使转子转动。开关磁阻电机有极高的效率和宽广的速度调节范围,因此被广泛应用于很多行业。三

一种改进的开关磁阻电机无位置传感器控制方法.docx
一种改进的开关磁阻电机无位置传感器控制方法一种改进的开关磁阻电机无位置传感器控制方法摘要:开关磁阻电机是一种新型的无传感器控制电机,其具有结构简单、体积小、寿命长等优点。然而,开关磁阻电机在无位置传感器的控制上仍面临一些挑战,如精准定位和响应速度较慢。本论文在研究开关磁阻电机无位置传感器控制的基础上,提出了一种改进的控制方法,旨在提高其定位精度和响应速度。通过实验证明,该方法在实现无位置传感器控制的同时,能够有效地提升开关磁阻电机的控制性能。关键词:开关磁阻电机;无位置传感器;控制方法;定位精度;响应速度

一种开关磁阻电机无位置传感器控制方法的实现.docx
一种开关磁阻电机无位置传感器控制方法的实现Title:ImplementationofaSwitched-ReluctanceMotorControlMethodwithoutPositionSensorsAbstract:TheSwitched-ReluctanceMotor(SRM)isapromisingelectricalmachineduetoitssimpleconstruction,robustness,andcost-effectiveness.However,conventionalSR