
智能小车运动控制装置、方法、设备及可读存储介质.pdf

鸿朗****ka

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能小车运动控制装置、方法、设备及可读存储介质.pdf
本发明公开了一种智能小车运动控制方法,通过控制预设PWM信号占空比来控制智能小车的第一主动轮和第二主动轮的运动速度,采用霍尔计数器对智能小车的第一主动轮和第二主动轮的转动圈数进行监控,并通过控制第一主动轮和第二主动轮的运动速度和运动圈数来实现智能小车的常规运动,包括:指定速度和距离的直线运动,指定速度和转动角度的原地自转,指定速度、半径和角度的圆形运动等,以及这些常规运动组合成的复杂运动。本发明还公开了一种智能小车运动控制装置、设备、以及可读存储介质。本发明使得智能小车可以实现一定精度运动控制并降低智能小
智能设备的控制方法及其装置、智能设备和可读存储介质.pdf
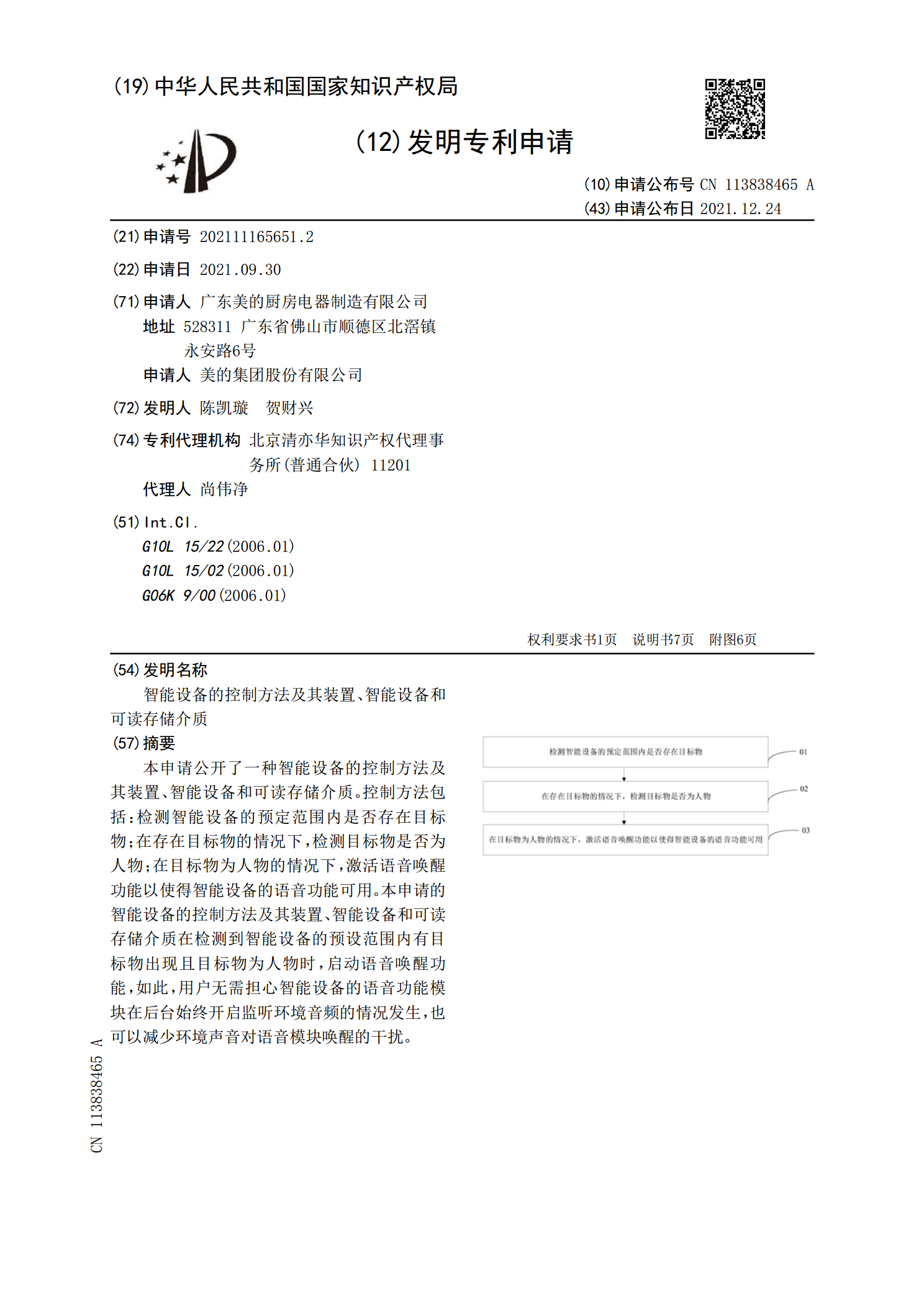
本申请公开了一种智能设备的控制方法及其装置、智能设备和可读存储介质。控制方法包括:检测智能设备的预定范围内是否存在目标物;在存在目标物的情况下,检测目标物是否为人物;在目标物为人物的情况下,激活语音唤醒功能以使得智能设备的语音功能可用。本申请的智能设备的控制方法及其装置、智能设备和可读存储介质在检测到智能设备的预设范围内有目标物出现且目标物为人物时,启动语音唤醒功能,如此,用户无需担心智能设备的语音功能模块在后台始终开启监听环境音频的情况发生,也可以减少环境声音对语音模块唤醒的干扰。
智能运动感知方法、装置、设备及可读存储介质.pdf
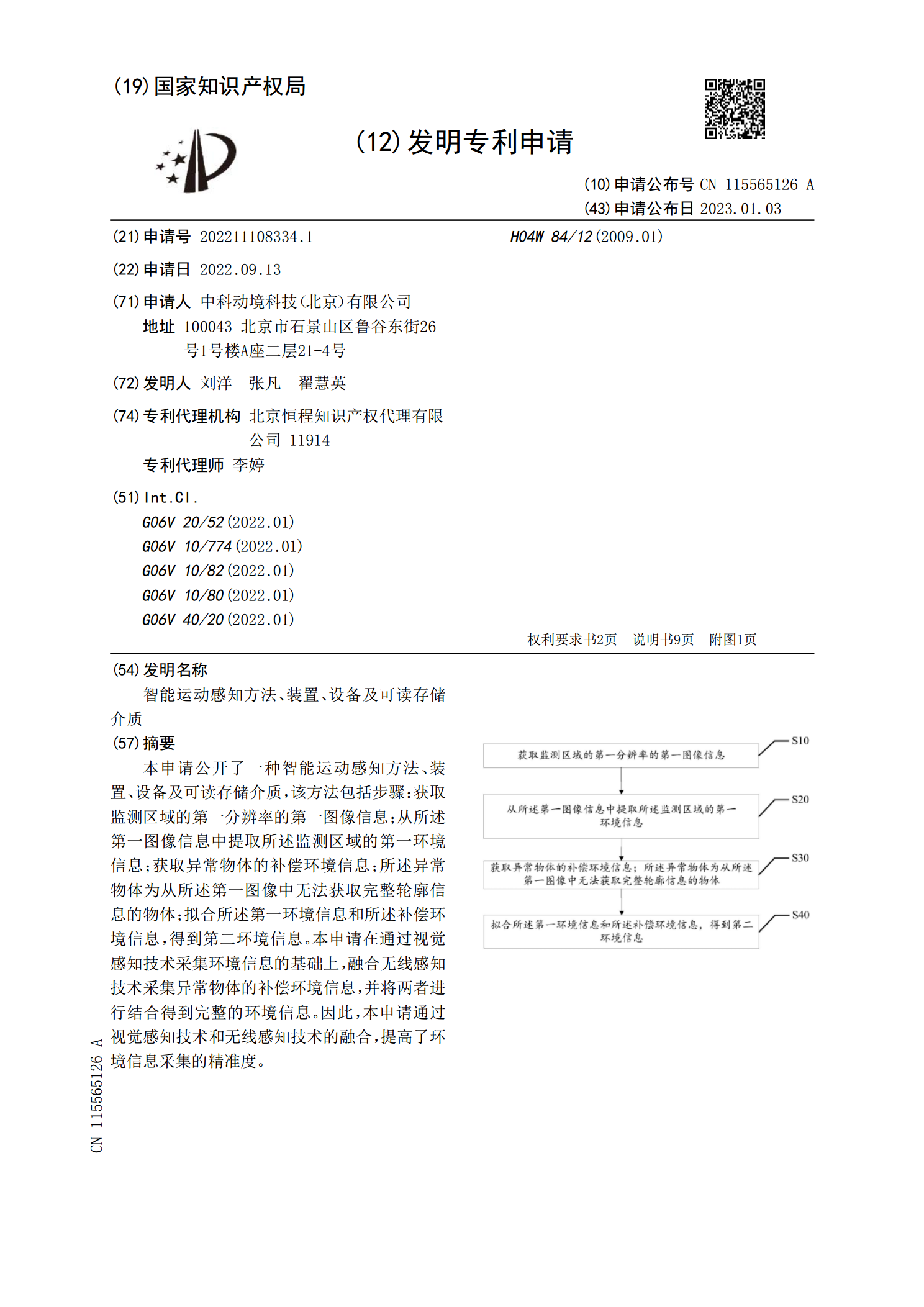
本申请公开了一种智能运动感知方法、装置、设备及可读存储介质,该方法包括步骤:获取监测区域的第一分辨率的第一图像信息;从所述第一图像信息中提取所述监测区域的第一环境信息;获取异常物体的补偿环境信息;所述异常物体为从所述第一图像中无法获取完整轮廓信息的物体;拟合所述第一环境信息和所述补偿环境信息,得到第二环境信息。本申请在通过视觉感知技术采集环境信息的基础上,融合无线感知技术采集异常物体的补偿环境信息,并将两者进行结合得到完整的环境信息。因此,本申请通过视觉感知技术和无线感知技术的融合,提高了环境信息采集的精
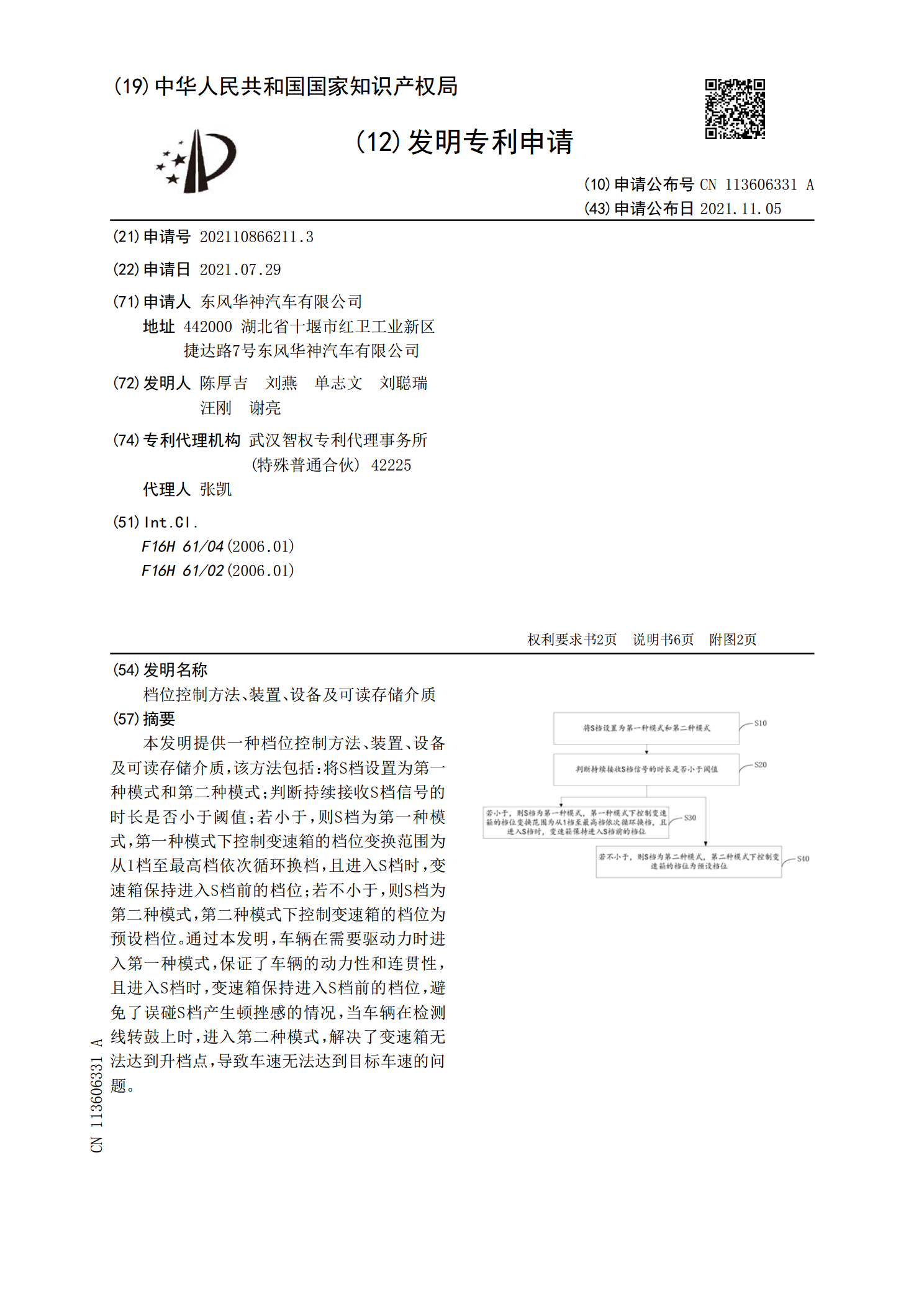
档位控制方法、装置、设备及可读存储介质.pdf
本发明提供一种档位控制方法、装置、设备及可读存储介质,该方法包括:将S档设置为第一种模式和第二种模式;判断持续接收S档信号的时长是否小于阈值;若小于,则S档为第一种模式,第一种模式下控制变速箱的档位变换范围为从1档至最高档依次循环换档,且进入S档时,变速箱保持进入S档前的档位;若不小于,则S档为第二种模式,第二种模式下控制变速箱的档位为预设档位。通过本发明,车辆在需要驱动力时进入第一种模式,保证了车辆的动力性和连贯性,且进入S档时,变速箱保持进入S档前的档位,避免了误碰S档产生顿挫感的情况,当车辆在检测线
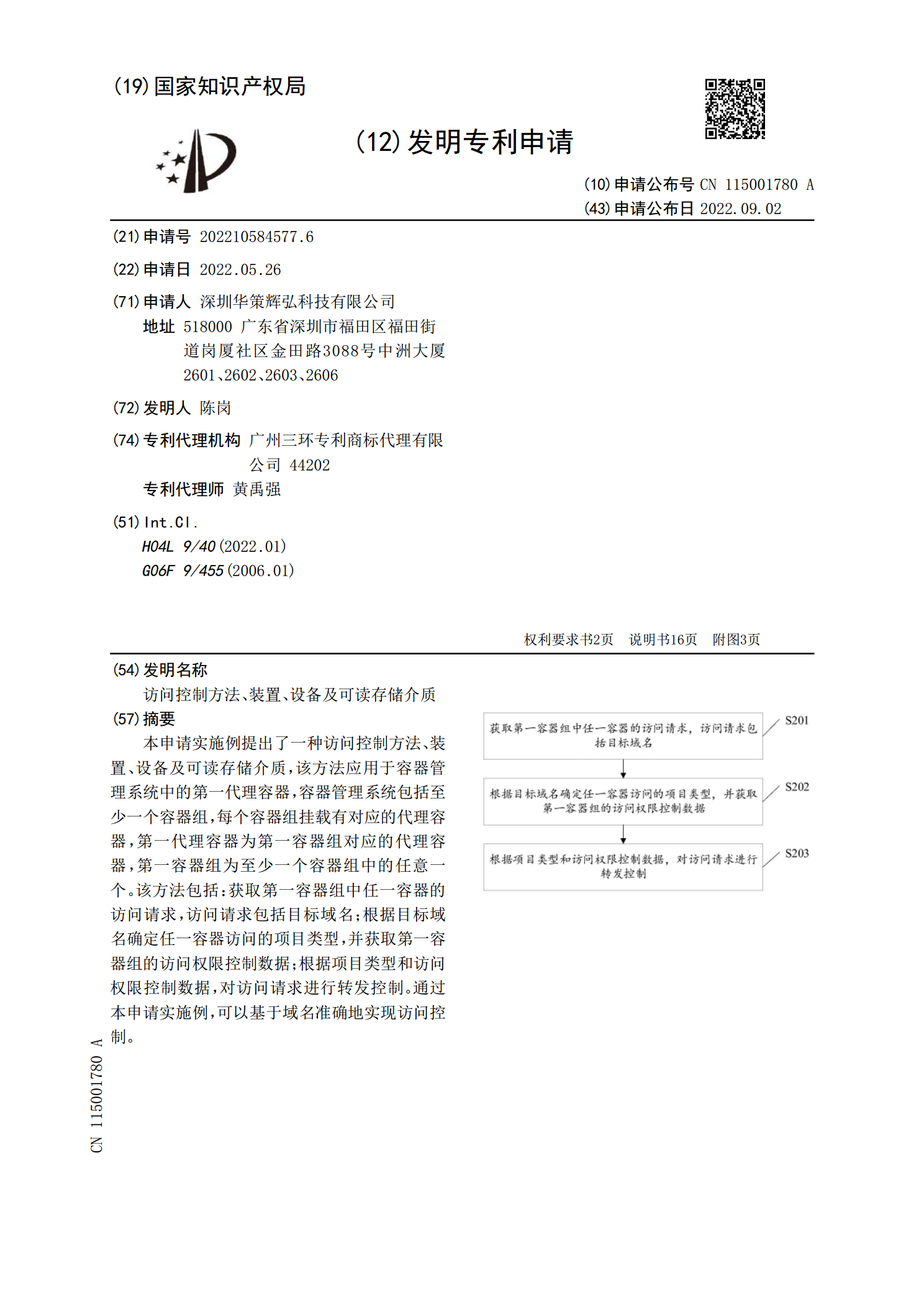
访问控制方法、装置、设备及可读存储介质.pdf
本申请实施例提出了一种访问控制方法、装置、设备及可读存储介质,该方法应用于容器管理系统中的第一代理容器,容器管理系统包括至少一个容器组,每个容器组挂载有对应的代理容器,第一代理容器为第一容器组对应的代理容器,第一容器组为至少一个容器组中的任意一个。该方法包括:获取第一容器组中任一容器的访问请求,访问请求包括目标域名;根据目标域名确定任一容器访问的项目类型,并获取第一容器组的访问权限控制数据;根据项目类型和访问权限控制数据,对访问请求进行转发控制。通过本申请实施例,可以基于域名准确地实现访问控制。