
轨道式机器人及其轨道式行走装置、系统与柔性导向机构.pdf

甲申****66


1/8
2/8

3/8
4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轨道式机器人及其轨道式行走装置、系统与柔性导向机构.pdf
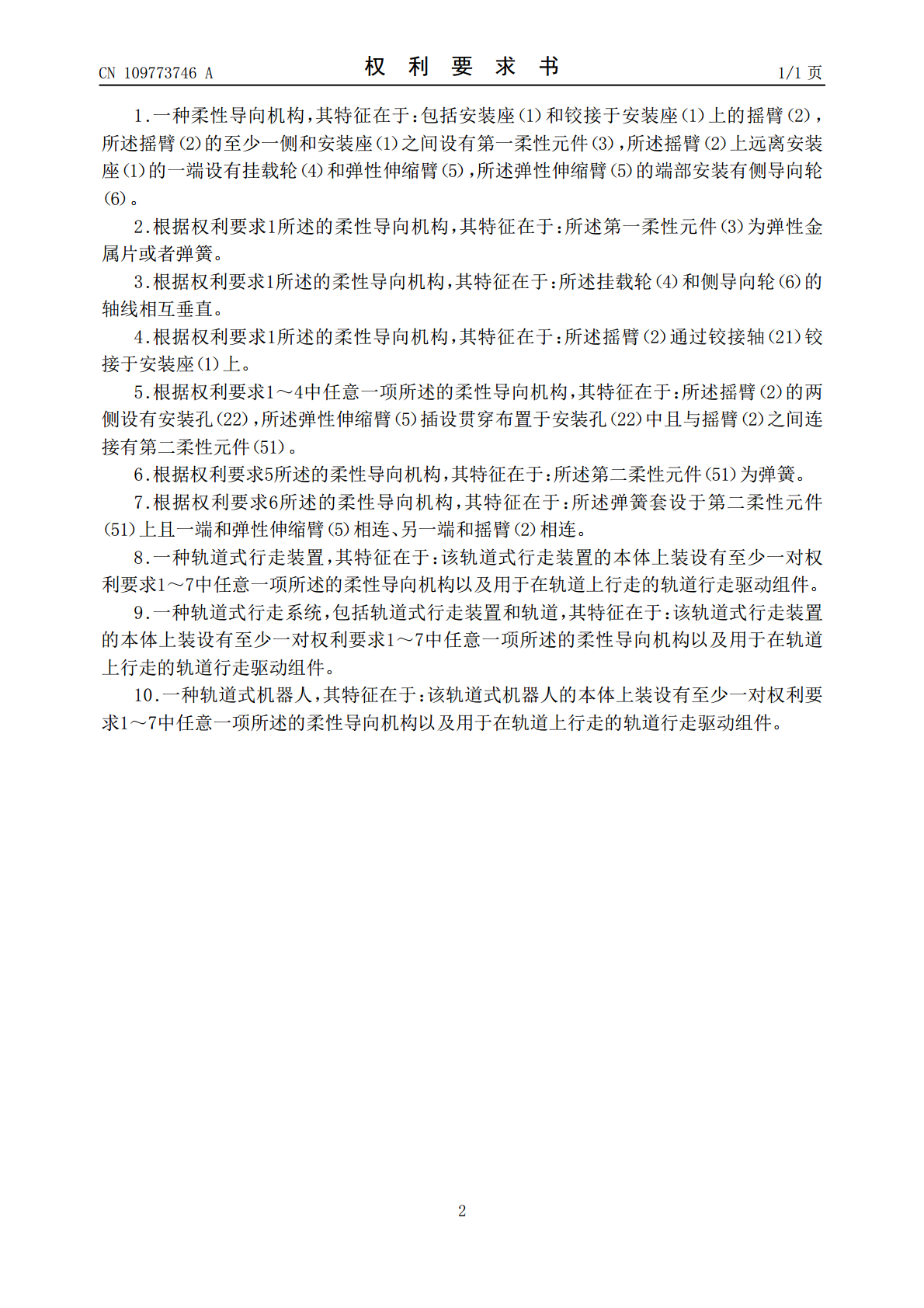
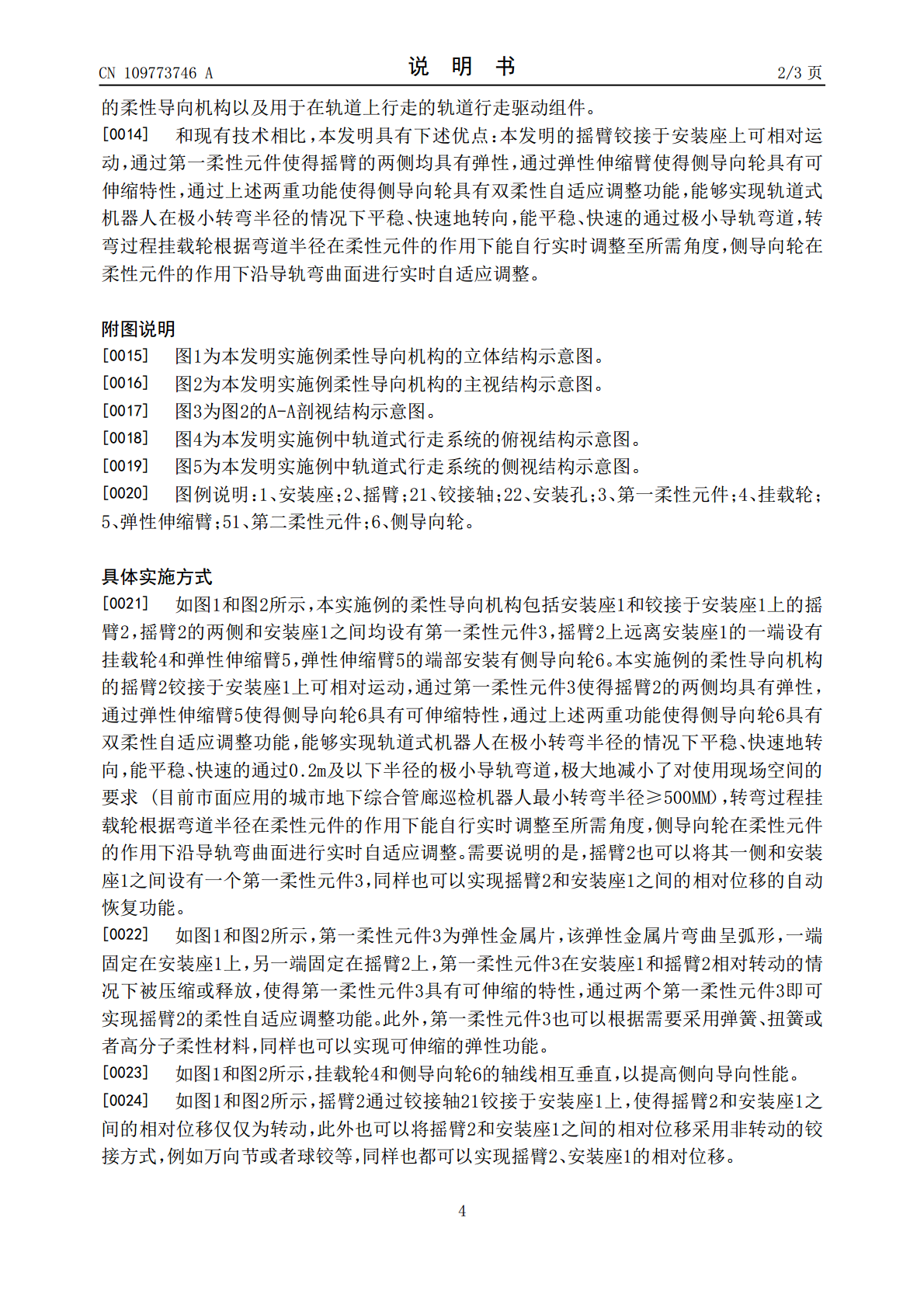
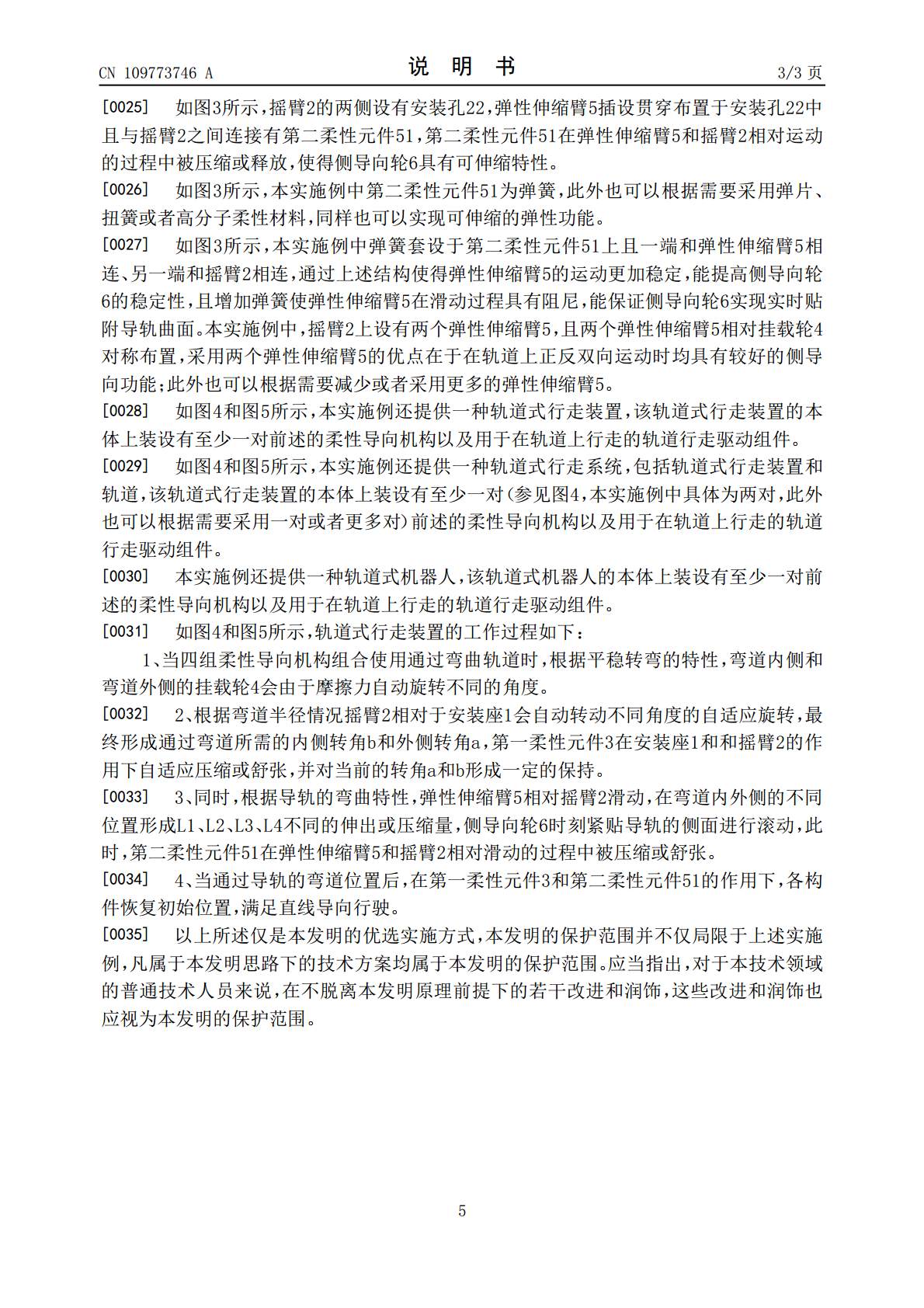
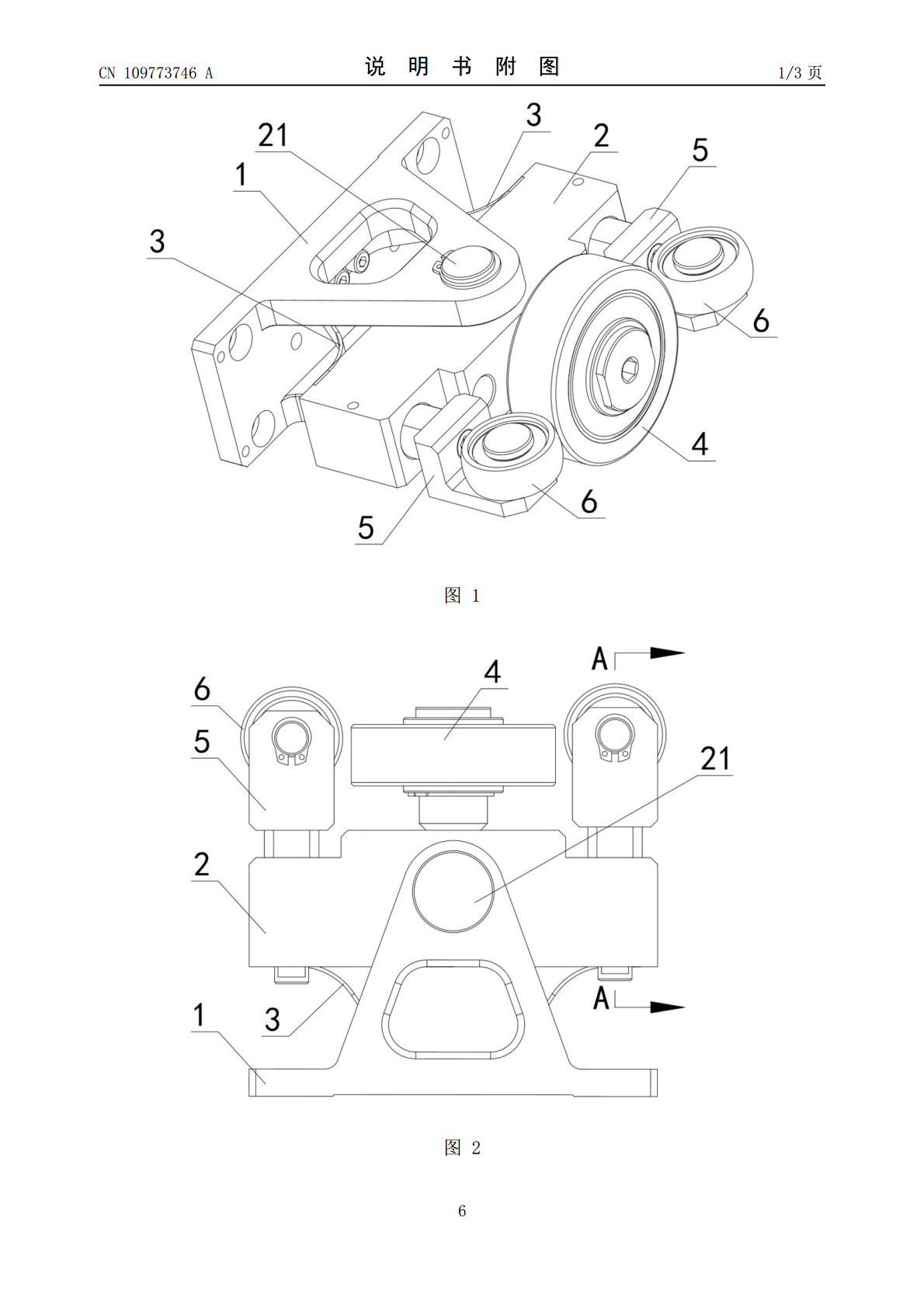
本发明公开了一种轨道式机器人及其轨道式行走装置、系统与柔性导向机构,本发明的柔性导向机构包括安装座和铰接于安装座上的摇臂,摇臂的两端和安装座之间均连接有第一柔性元件,摇臂上远离安装座的一端设有挂载轮、且位于挂载轮的两侧设有伸缩臂,伸缩臂的端部安装有侧导向轮;轨道式机器人及其轨道式行走装置、系统的本体上装设有至少一对前述柔性导向机构以及轨道行走驱动组件。本发明能够实现轨道式机器人在极小转弯半径的情况下平稳、快速地转向,能平稳、快速的通过极小导轨弯道,转弯过程挂载轮根据弯道半径在柔性元件的作用下能自行实时调整
移动式轨道检测系统及其移动式轨道检测装置.pdf
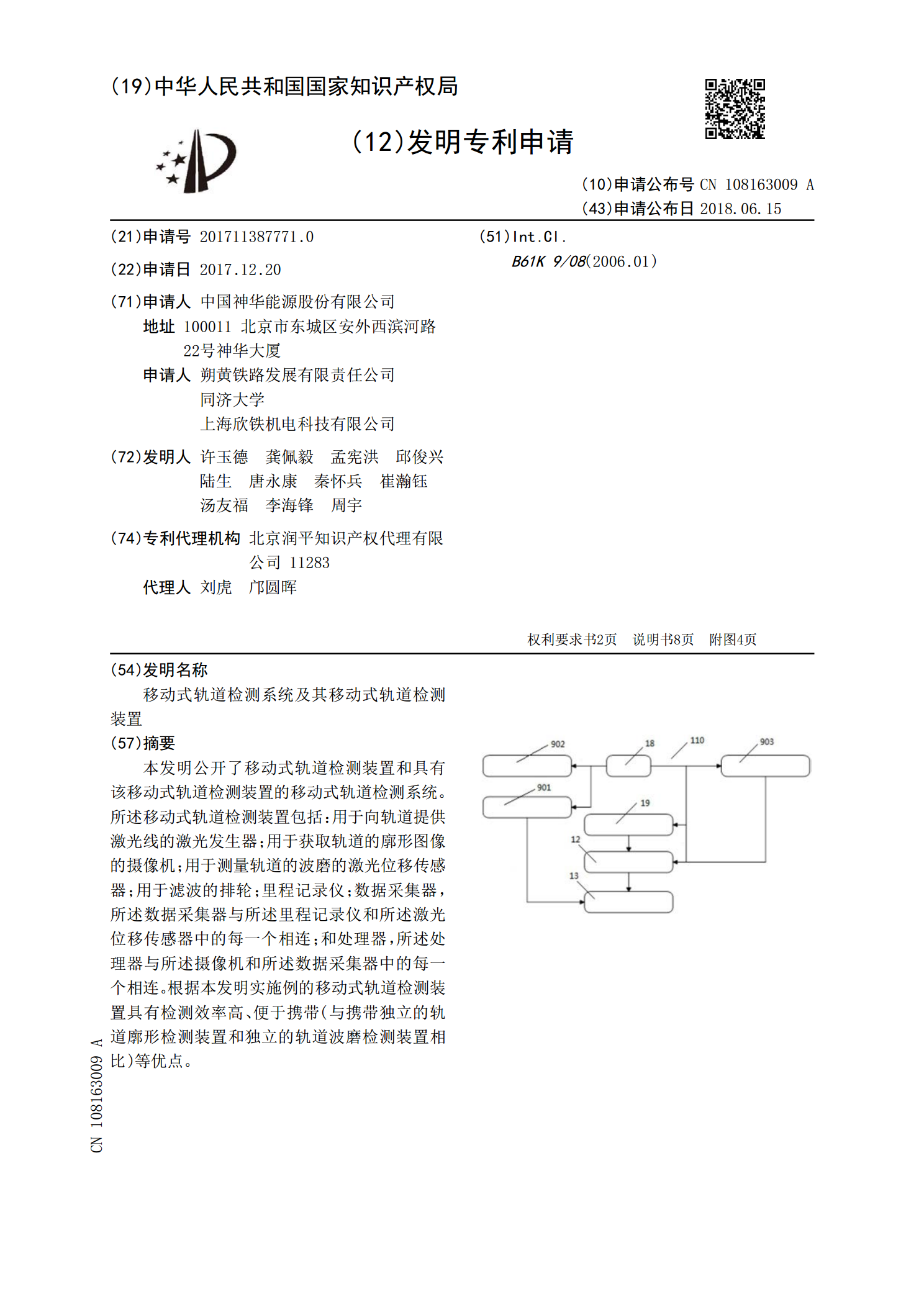
本发明公开了移动式轨道检测装置和具有该移动式轨道检测装置的移动式轨道检测系统。所述移动式轨道检测装置包括:用于向轨道提供激光线的激光发生器;用于获取轨道的廓形图像的摄像机;用于测量轨道的波磨的激光位移传感器;用于滤波的排轮;里程记录仪;数据采集器,所述数据采集器与所述里程记录仪和所述激光位移传感器中的每一个相连;和处理器,所述处理器与所述摄像机和所述数据采集器中的每一个相连。根据本发明实施例的移动式轨道检测装置具有检测效率高、便于携带(与携带独立的轨道廓形检测装置和独立的轨道波磨检测装置相比)等优点。

一种轨道式巡检机器人行走机构.pdf
本发明涉及一种轨道式巡检机器人行走机构,包括支撑板、至少两个轮盘、多个爬行轮爪;由多个爬行轮爪首尾连接形成链传动机构;支撑板呈上小下大的U型状,支撑板、轮盘固定在机器人上,支撑板底部与链传动机构内壁接触,支撑板位于在爬行轮爪抓紧和放开运行轨道的过渡位置;机器人带动轮盘转动,轮盘带动爬行轮爪运动,当爬行轮爪运动至支撑板处时爬行轮爪与支撑板接触使得爬行轮爪张开,当爬行轮爪继续运动直至爬行轮爪与支撑板分离时爬行轮爪闭合并夹紧运行轨道,带动机器人安全稳定地在复杂的运行轨道上运动。
快装快卸式吊装轨道机器人及其行走装置、装卸方法.pdf
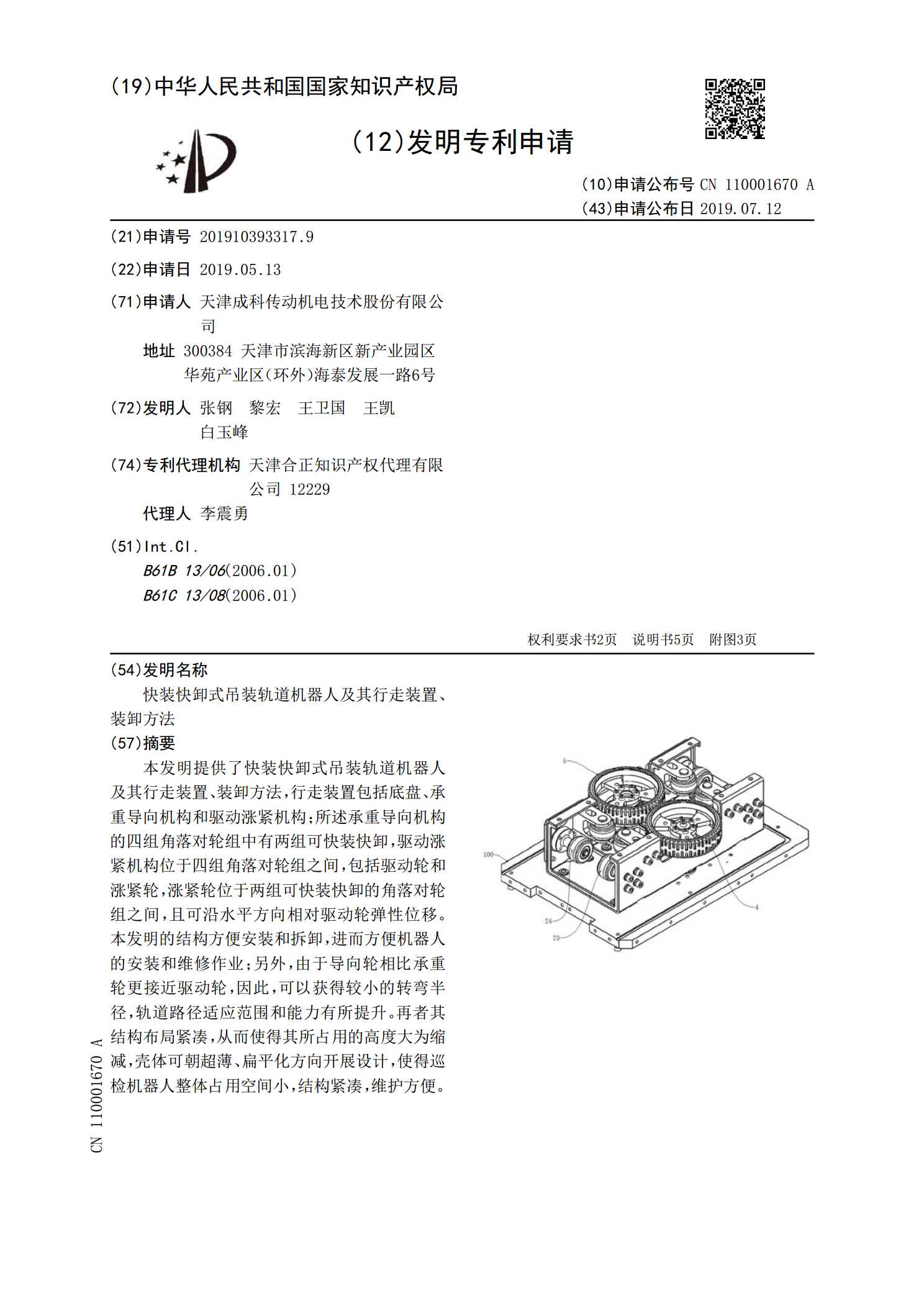
本发明提供了快装快卸式吊装轨道机器人及其行走装置、装卸方法,行走装置包括底盘、承重导向机构和驱动涨紧机构;所述承重导向机构的四组角落对轮组中有两组可快装快卸,驱动涨紧机构位于四组角落对轮组之间,包括驱动轮和涨紧轮,涨紧轮位于两组可快装快卸的角落对轮组之间,且可沿水平方向相对驱动轮弹性位移。本发明的结构方便安装和拆卸,进而方便机器人的安装和维修作业;另外,由于导向轮相比承重轮更接近驱动轮,因此,可以获得较小的转弯半径,轨道路径适应范围和能力有所提升。再者其结构布局紧凑,从而使得其所占用的高度大为缩减,壳体可
轨道行走装置及轨道机器人.pdf
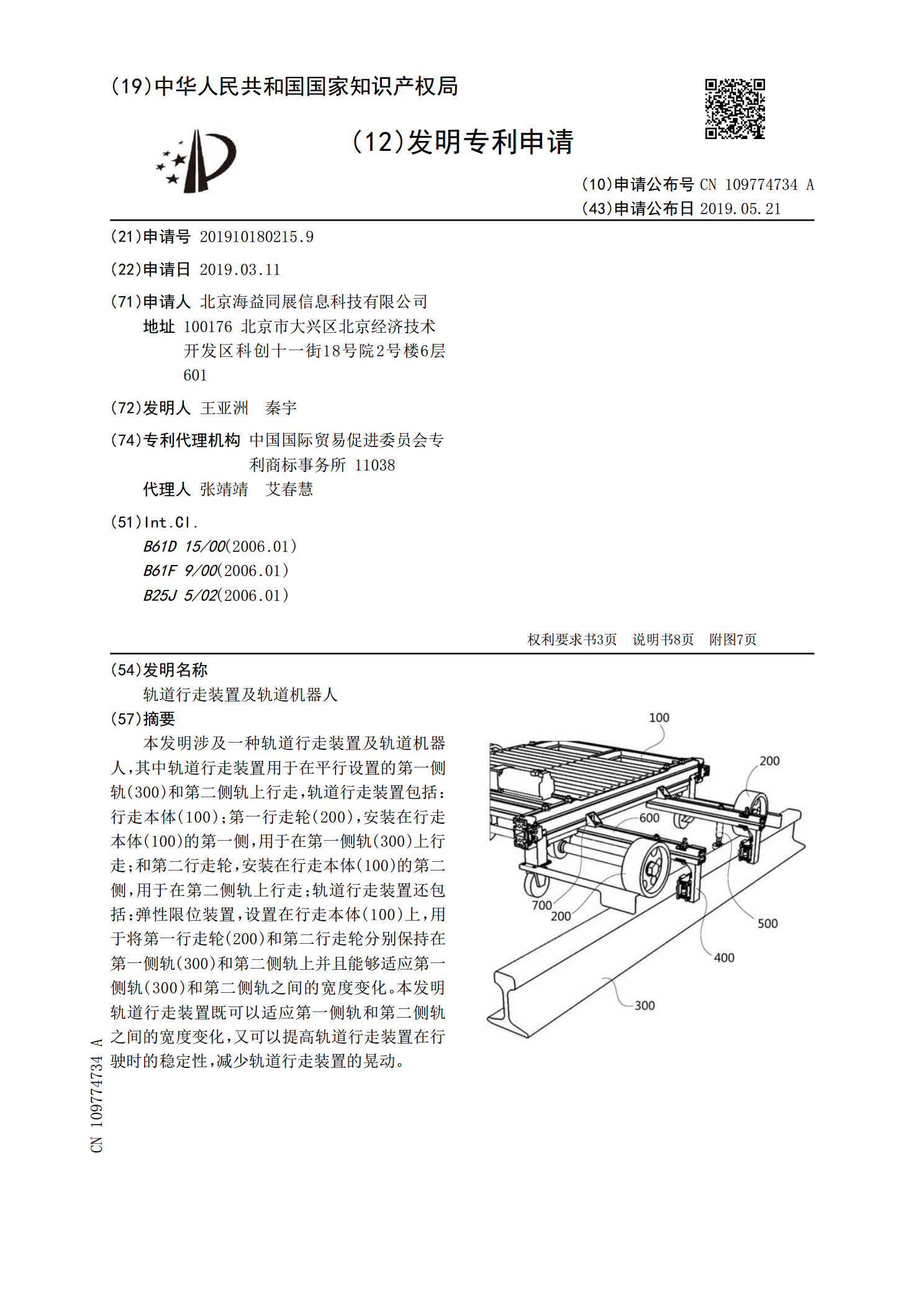
本发明涉及一种轨道行走装置及轨道机器人,其中轨道行走装置用于在平行设置的第一侧轨(300)和第二侧轨上行走,轨道行走装置包括:行走本体(100);第一行走轮(200),安装在行走本体(100)的第一侧,用于在第一侧轨(300)上行走;和第二行走轮,安装在行走本体(100)的第二侧,用于在第二侧轨上行走;轨道行走装置还包括:弹性限位装置,设置在行走本体(100)上,用于将第一行走轮(200)和第二行走轮分别保持在第一侧轨(300)和第二侧轨上并且能够适应第一侧轨(300)和第二侧轨之间的宽度变化。本发明轨道