
快装快卸式吊装轨道机器人及其行走装置、装卸方法.pdf

爱欢****23

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
快装快卸式吊装轨道机器人及其行走装置、装卸方法.pdf
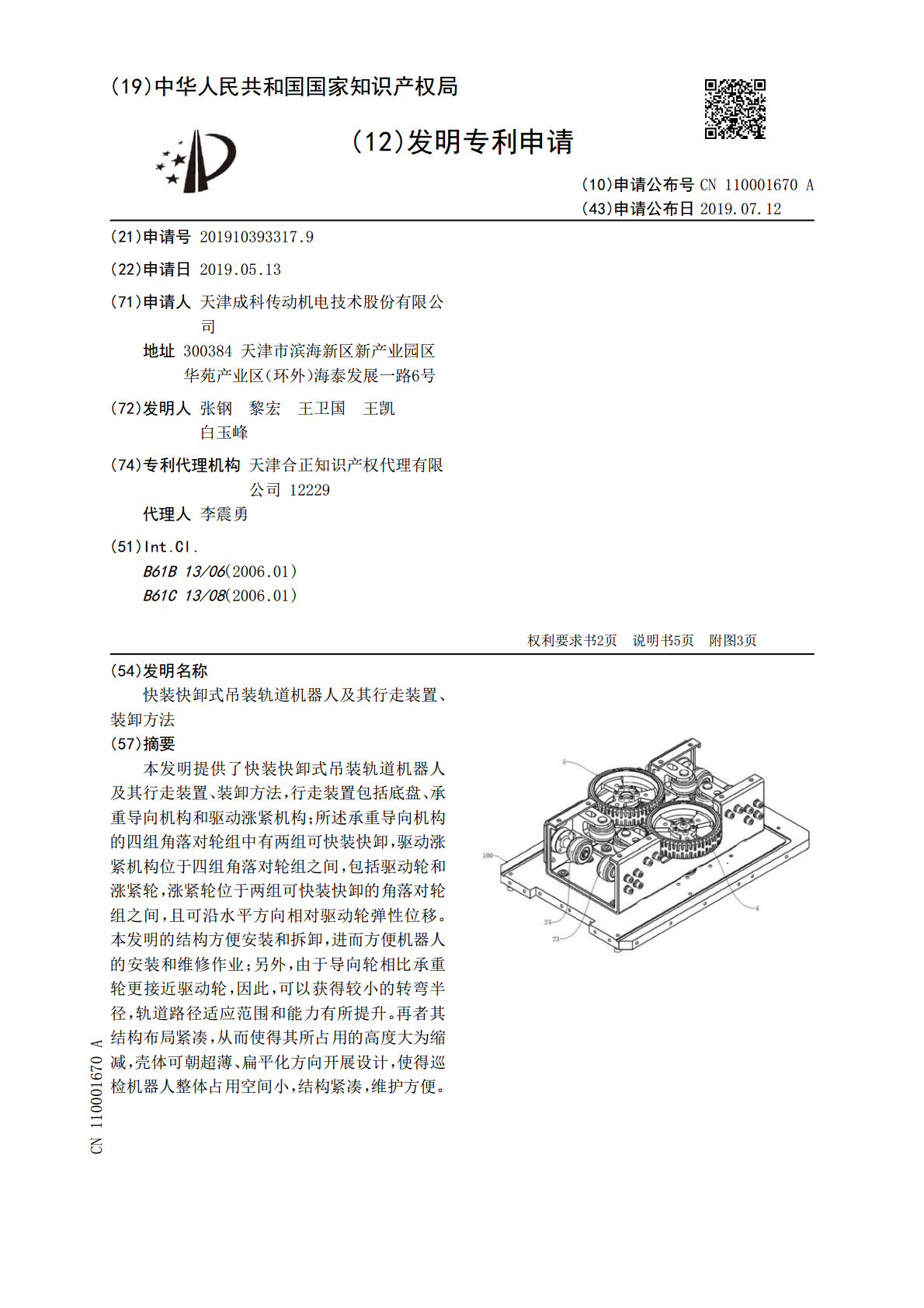
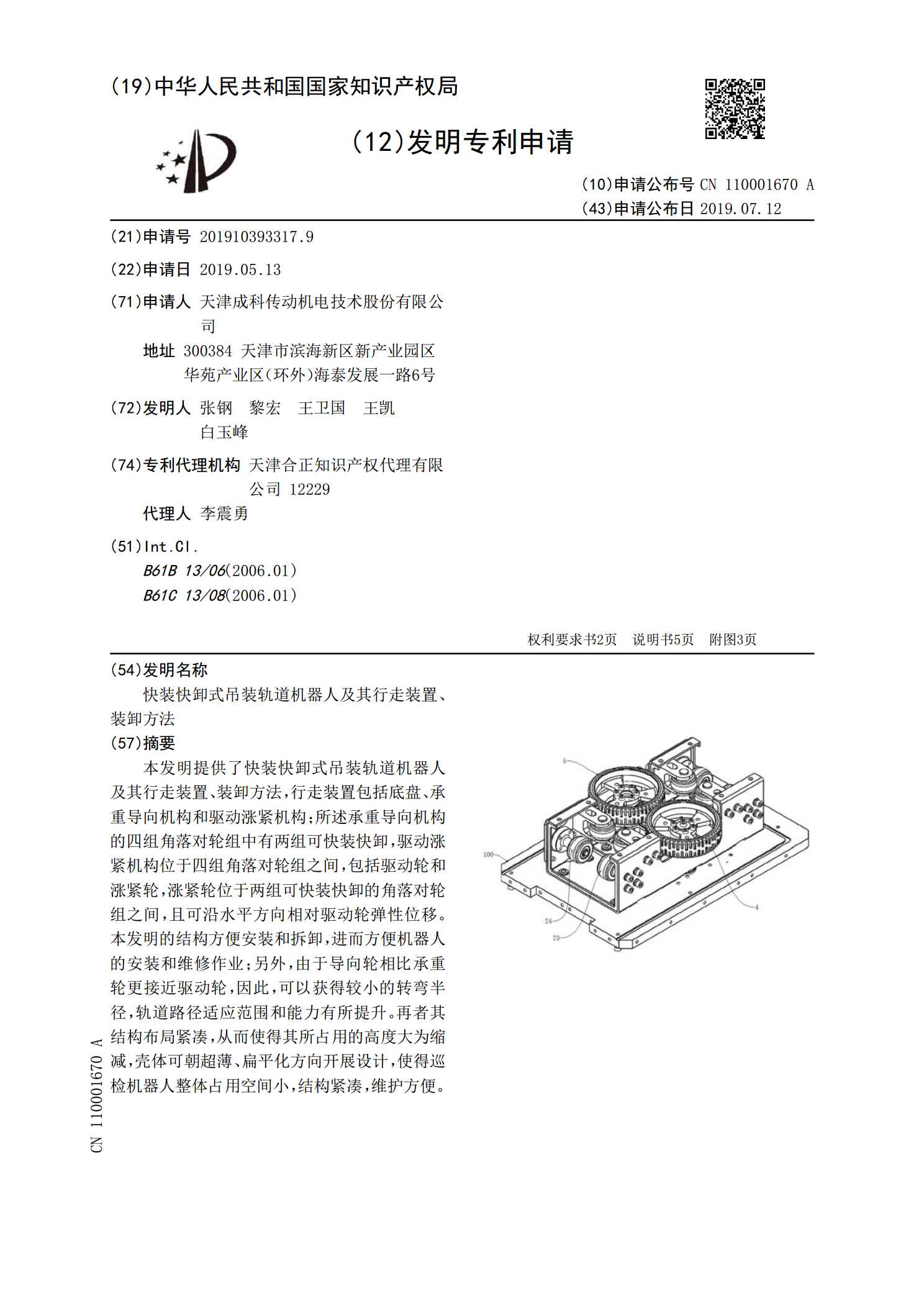
本发明提供了快装快卸式吊装轨道机器人及其行走装置、装卸方法,行走装置包括底盘、承重导向机构和驱动涨紧机构;所述承重导向机构的四组角落对轮组中有两组可快装快卸,驱动涨紧机构位于四组角落对轮组之间,包括驱动轮和涨紧轮,涨紧轮位于两组可快装快卸的角落对轮组之间,且可沿水平方向相对驱动轮弹性位移。本发明的结构方便安装和拆卸,进而方便机器人的安装和维修作业;另外,由于导向轮相比承重轮更接近驱动轮,因此,可以获得较小的转弯半径,轨道路径适应范围和能力有所提升。再者其结构布局紧凑,从而使得其所占用的高度大为缩减,壳体可
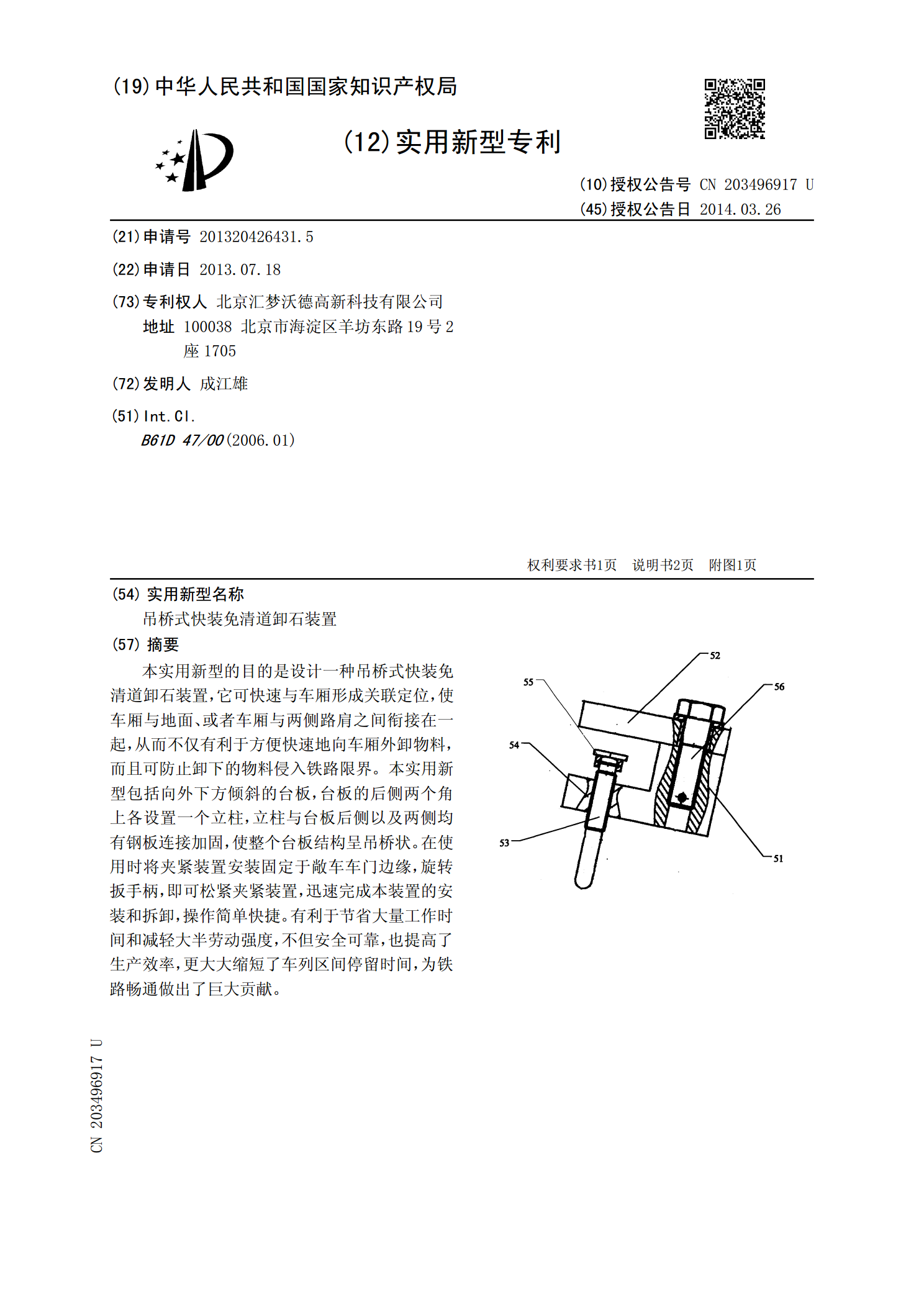
吊桥式快装免清道卸石装置.pdf
本实用新型的目的是设计一种吊桥式快装免清道卸石装置,它可快速与车厢形成关联定位,使车厢与地面、或者车厢与两侧路肩之间衔接在一起,从而不仅有利于方便快速地向车厢外卸物料,而且可防止卸下的物料侵入铁路限界。本实用新型包括向外下方倾斜的台板,台板的后侧两个角上各设置一个立柱,立柱与台板后侧以及两侧均有钢板连接加固,使整个台板结构呈吊桥状。在使用时将夹紧装置安装固定于敞车车门边缘,旋转扳手柄,即可松紧夹紧装置,迅速完成本装置的安装和拆卸,操作简单快捷。有利于节省大量工作时间和减轻大半劳动强度,不但安全可靠,也提高
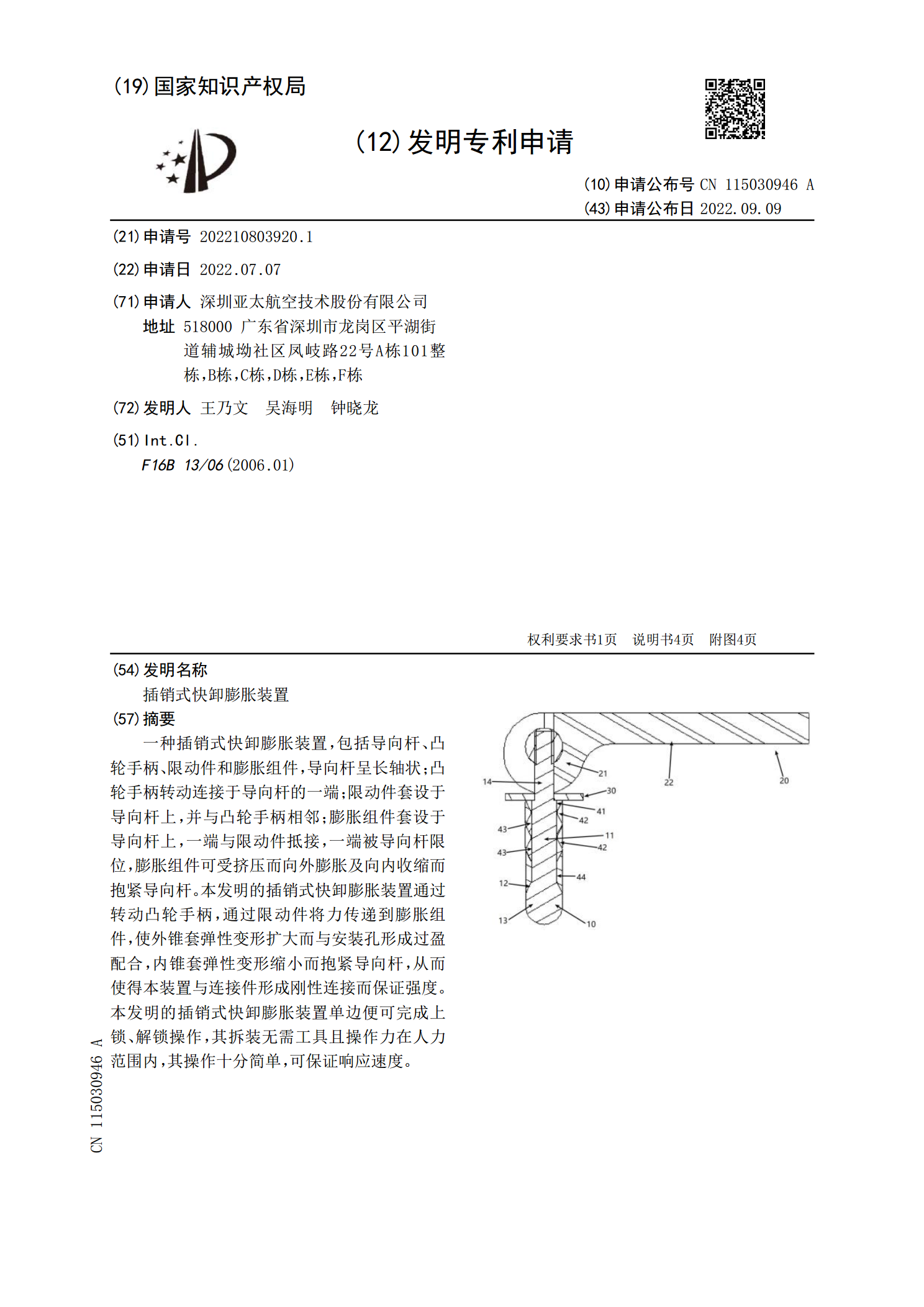
插销式快卸膨胀装置.pdf
一种插销式快卸膨胀装置,包括导向杆、凸轮手柄、限动件和膨胀组件,导向杆呈长轴状;凸轮手柄转动连接于导向杆的一端;限动件套设于导向杆上,并与凸轮手柄相邻;膨胀组件套设于导向杆上,一端与限动件抵接,一端被导向杆限位,膨胀组件可受挤压而向外膨胀及向内收缩而抱紧导向杆。本发明的插销式快卸膨胀装置通过转动凸轮手柄,通过限动件将力传递到膨胀组件,使外锥套弹性变形扩大而与安装孔形成过盈配合,内锥套弹性变形缩小而抱紧导向杆,从而使得本装置与连接件形成刚性连接而保证强度。本发明的插销式快卸膨胀装置单边便可完成上锁、解锁操作
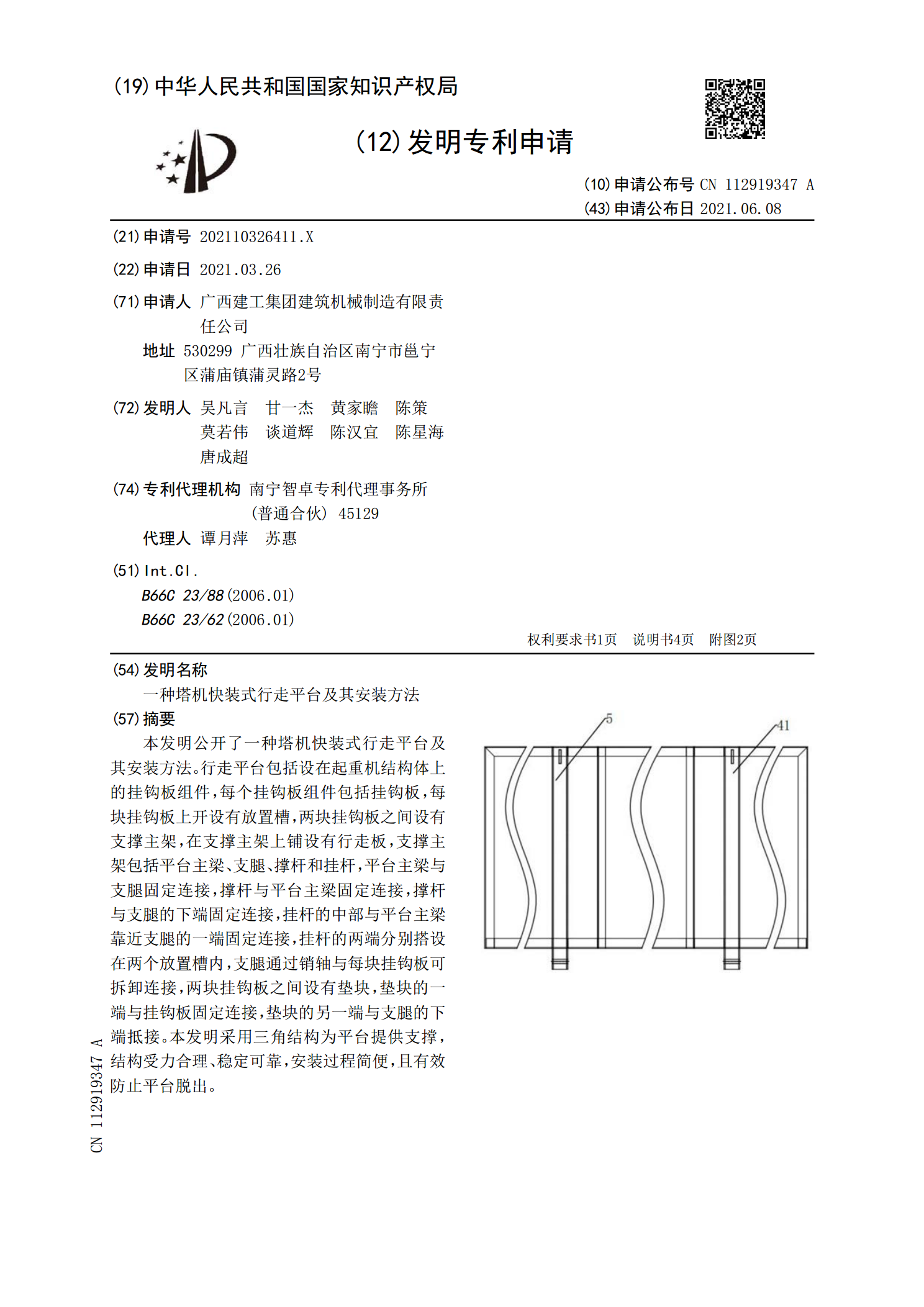
一种塔机快装式行走平台及其安装方法.pdf
本发明公开了一种塔机快装式行走平台及其安装方法。行走平台包括设在起重机结构体上的挂钩板组件,每个挂钩板组件包括挂钩板,每块挂钩板上开设有放置槽,两块挂钩板之间设有支撑主架,在支撑主架上铺设有行走板,支撑主架包括平台主梁、支腿、撑杆和挂杆,平台主梁与支腿固定连接,撑杆与平台主梁固定连接,撑杆与支腿的下端固定连接,挂杆的中部与平台主梁靠近支腿的一端固定连接,挂杆的两端分别搭设在两个放置槽内,支腿通过销轴与每块挂钩板可拆卸连接,两块挂钩板之间设有垫块,垫块的一端与挂钩板固定连接,垫块的另一端与支腿的下端抵接。本
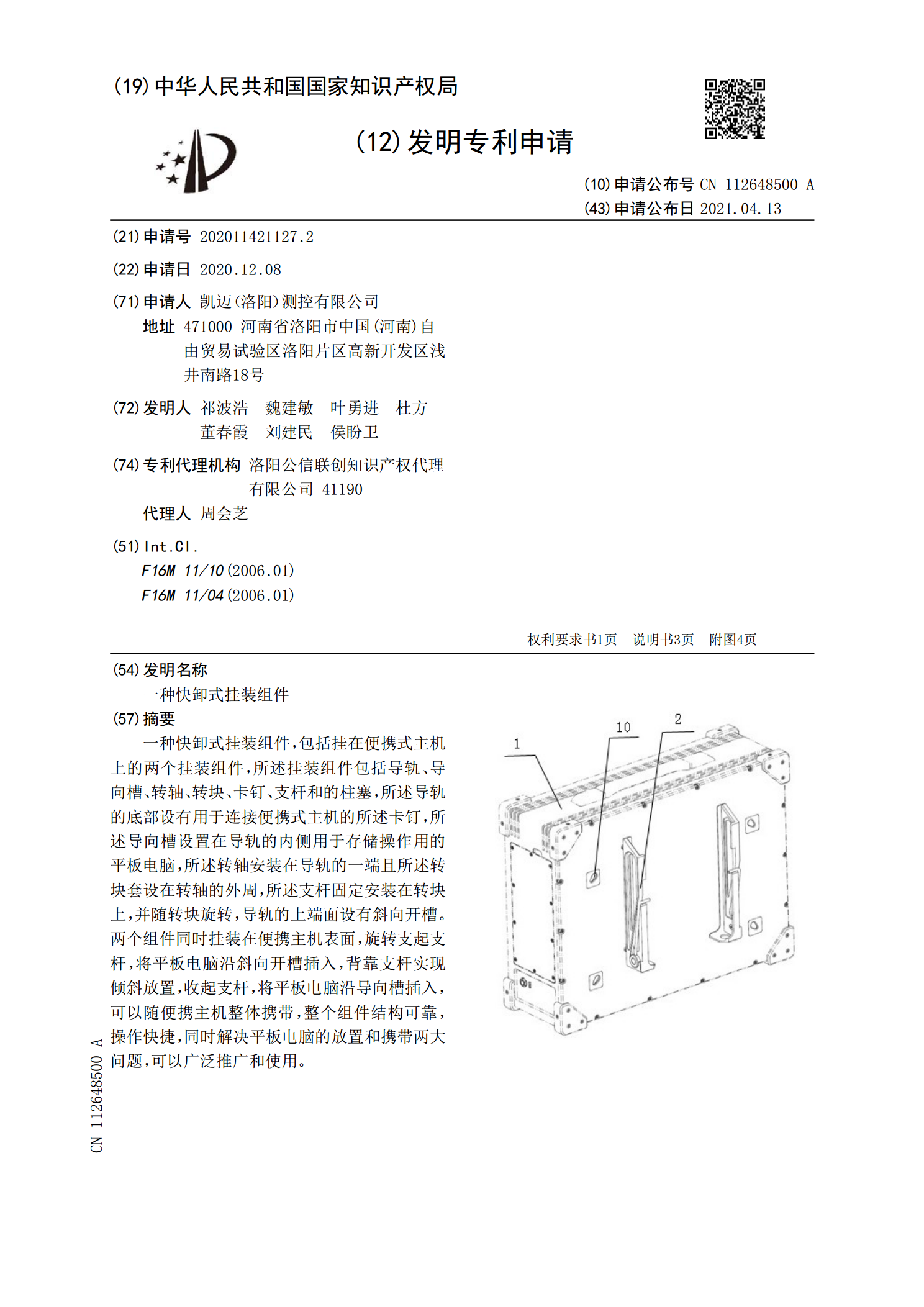
一种快卸式挂装组件.pdf
一种快卸式挂装组件,包括挂在便携式主机上的两个挂装组件,所述挂装组件包括导轨、导向槽、转轴、转块、卡钉、支杆和的柱塞,所述导轨的底部设有用于连接便携式主机的所述卡钉,所述导向槽设置在导轨的内侧用于存储操作用的平板电脑,所述转轴安装在导轨的一端且所述转块套设在转轴的外周,所述支杆固定安装在转块上,并随转块旋转,导轨的上端面设有斜向开槽。两个组件同时挂装在便携主机表面,旋转支起支杆,将平板电脑沿斜向开槽插入,背靠支杆实现倾斜放置,收起支杆,将平板电脑沿导向槽插入,可以随便携主机整体携带,整个组件结构可靠,操作