
基于改进遗传算法的六自由度机械臂轨迹优化方法.pdf

是你****元呀

1/10
2/10
3/10
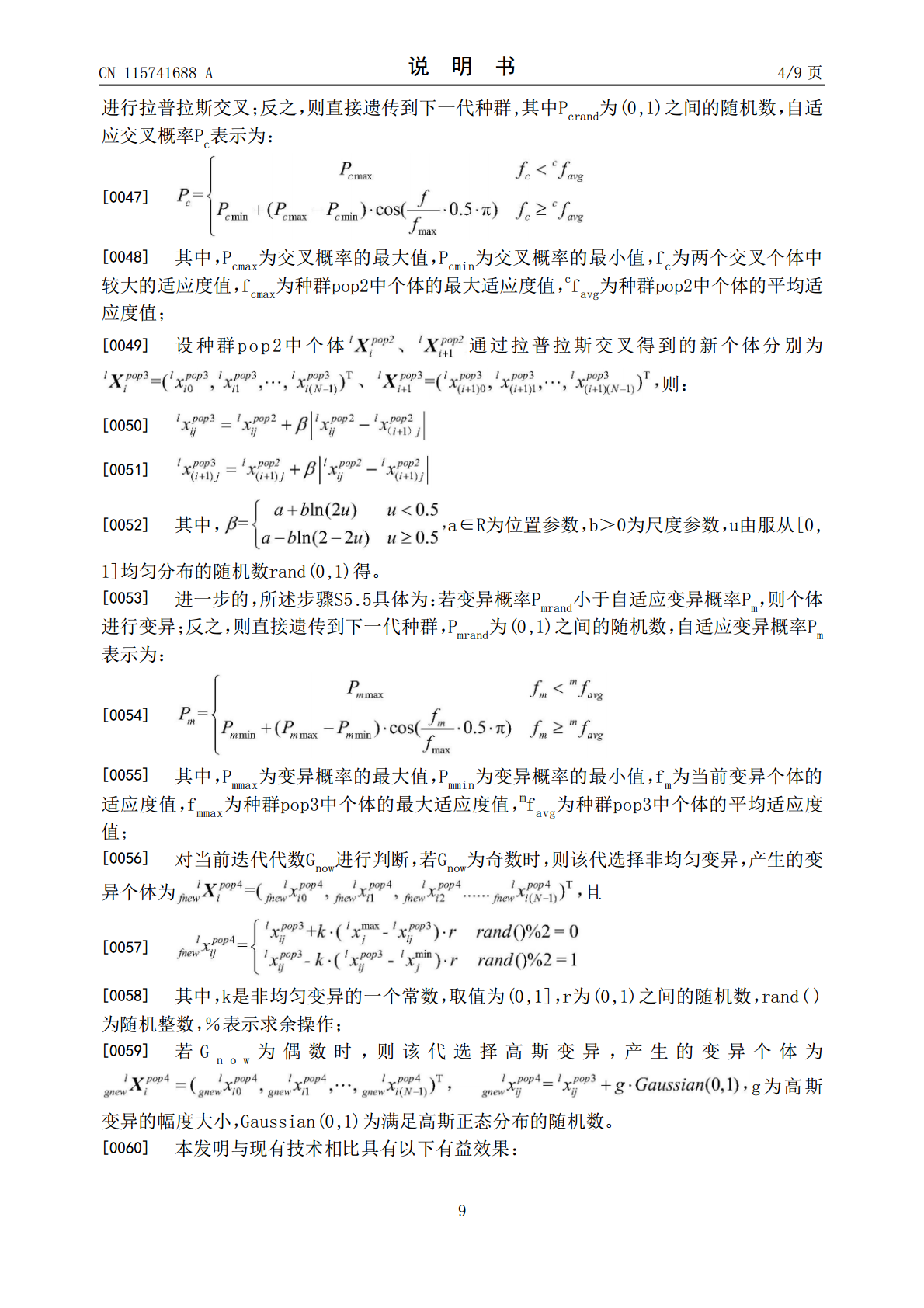
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进遗传算法的六自由度机械臂轨迹优化方法.pdf
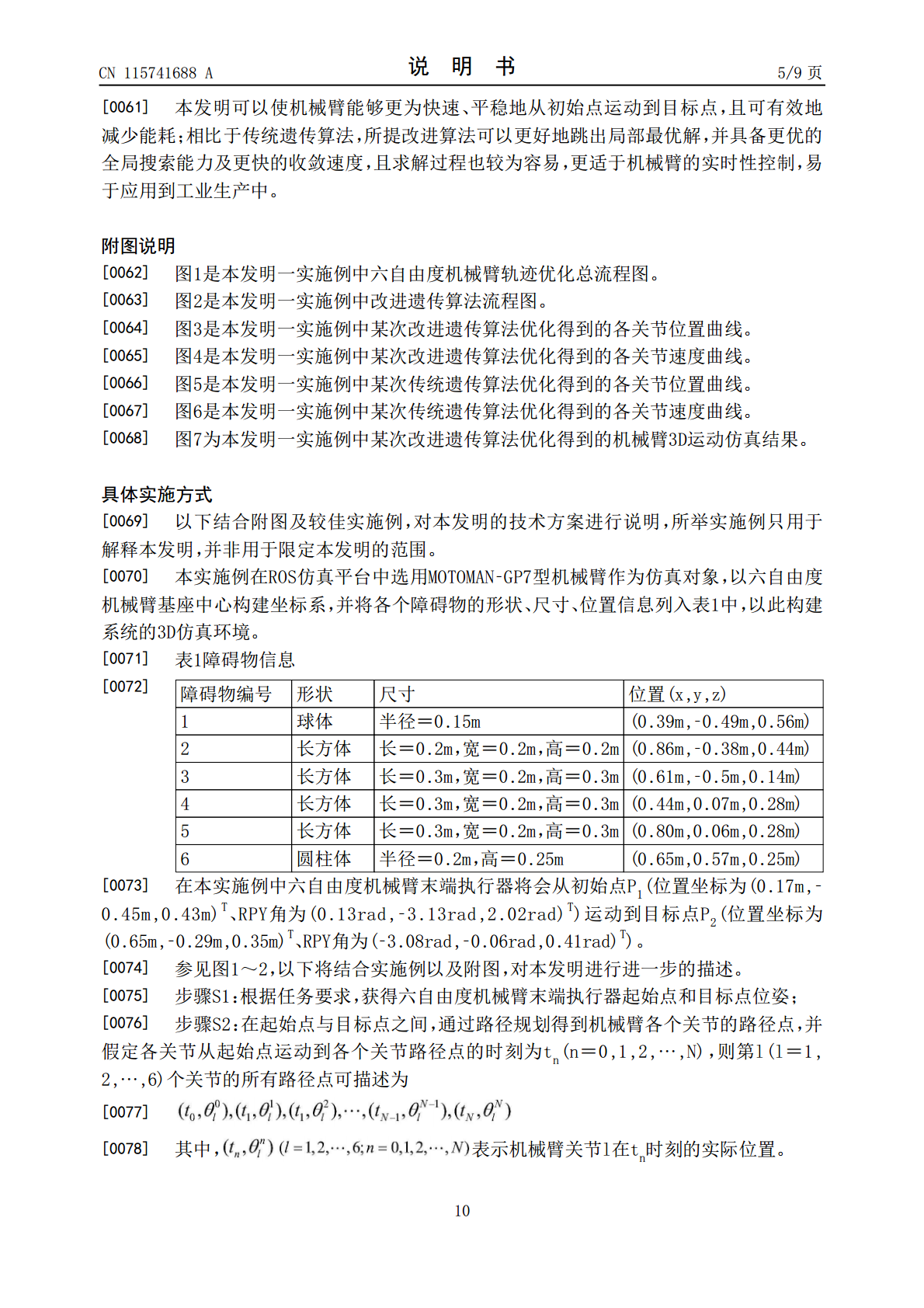
本发明涉及一种基于改进遗传算法的六自由度机械臂轨迹优化方法,包括:步骤S1:获得六自由度机械臂末端执行器起始点和目标点位姿;步骤S2:在起始点与目标点之间,通过路径规划得到机械臂各个关节的路径点;步骤S3:采用三次样条插值算法在机械臂每个关节的相邻两个路径点间构建运动轨迹,获取轨迹曲线多项式;步骤S4:基于轨迹曲线多项式,构建关节的子目标函数;步骤S5:基于改进遗传算法对机械臂关节轨迹进行优化;步骤S6:对得到的每一段曲线轨迹,在所有关节的最优个体中选择最长时间作为该段轨迹的最佳时间;步骤S7:基于轨迹的

一种基于改进遗传算法的火箭轨迹优化方法.pdf
本发明公开了一种基于改进遗传算法的火箭轨迹优化方法,包括:步骤1)通过变分法将火箭轨迹优化的最优控制问题转化为火箭亚音速段攻角绝对值的最大值、火箭俯仰角变化率的参数优化问题;步骤2)对火箭亚音速段攻角绝对值的最大值、火箭俯仰角变化率进行二进制编码生成初代种群;步骤3)以最大射程为优化目标,对种群中的个体适应度进行计算;步骤4)对于火箭飞行过程中的等式和不等式约束,利用罚函数对种群个体的适应度进行调整;步骤5)利用计算得到的种群适应度,将种群中最优个体进行保留;步骤6)从种群中选取两个父本,并利用相似度阈值
基于遗传算法的机械臂轨迹规划方法、系统、介质和设备.pdf
本申请提供了一种基于遗传算法的机械臂轨迹规划方法、系统、计算机可读存储介质和电子设备。该方法包括:确定所述机械臂的约束条件;其中,所述约束条件包括:空间位置约束条件、速度约束条件、加速度约束条件;基于遗传算法,根据所述约束条件,按照预设的优化目标,对所述机械臂进行运动轨迹规划。籍此,充分提高机械臂的工作效率,并且机械臂在运行过程中,整个机械臂的运行轨迹、速度、加速度的曲线平滑,关节角度、角速度、角加速度光滑且连续,保证了机械臂在运行过程中平稳、无抖动的转动,不会产生突变,有效延长了机械臂的使用寿命。

六自由度机械臂轨迹规划研究的综述报告.docx
六自由度机械臂轨迹规划研究的综述报告随着近年来机器人技术的快速发展,机器人在生产、服务和医疗等领域得到了广泛应用。六自由度机器人臂是其中一种机器人类型,它具有6个自由度,可以自由控制其位置和姿态,完成多个任务。在机器人应用中,机器人的路径规划与控制是一个关键问题。对于六自由度机器人臂而言,路径规划研究是一个复杂的问题,需要充分考虑机器人的运动学方程、动力学方程以及避障等多种因素。本文对六自由度机器人臂路径规划的相关研究进行了综述。六自由度机器人臂轨迹规划的方法主要可以分为两大类:基于数学模型的方法和基于搜

六自由度机械臂轨迹规划研究的中期报告.docx
六自由度机械臂轨迹规划研究的中期报告一、研究背景机械臂在工业、航空航天等领域具有广泛的应用,其精准控制和高效运动能力为生产和研发带来很大的帮助。机械臂的运动轨迹规划是机械臂控制技术中的重要研究领域。在工作中,机械臂需要根据不同的工作需求,完成多种复杂运动任务。轨迹规划就是机械臂根据工作需求,通过数学模型和算法计算出机械臂的合适运动路径。因此,机械臂的轨迹规划是控制机械臂动作的核心技术之一。本文中期报告旨在介绍六自由度机械臂轨迹规划的研究进展和成果,以及未来的研究方向。二、研究目的六自由度机械臂轨迹规划的主