
一种轮对的行进系统及其控制方法.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮对的行进系统及其控制方法.pdf
本发明公开了一种轮对的行进系统及其控制方法,该系统包括轮毂电机,将轮毂电机用主连轴机构连接起来组成轮对结构,在行进的过程中通过在联轴机构所放置的转角传感器来采集双轮行驶的状态,将采集后的数据通过插卡式智能控制板,对采集数据进行处理,应用控制算法对此时所得到的轮子状态进行控制;所述插卡式智能控制板与其他的轮对进行组网,构成协同控制。本发明突破了传统的轮子转向机构,为未来车子行进的模式进行了全新的探索,给出了相应的设计,提供了一种可以实现共享经济发展、人工智能发展的一种全新驱动模式。

行进控制系统和行进控制方法.pdf
行进控制系统和行进控制方法。一种用于车辆的行进控制系统,该车辆设置有驱动源、轮以及用于制动所述轮的制动装置,所述轮具有经由动力传递构件连接到所述驱动源的轮体,并具有安装在所述轮体上的轮胎,所述行进控制系统包括:估计单元,其配置成至少基于所述驱动源的旋转速度、所述轮体的旋转速度、车体速度和施加到所述轮体的扭矩来估计轮胎扭转刚度以及路面摩擦系数;以及控制单元,其配置成控制所述驱动源和所述制动装置中的至少一者,以使所述轮胎不超过根据所述轮胎扭转刚度和所述路面摩擦系数得出的附着极限。

车辆行进控制方法及车辆行进控制系统.pdf
一种车辆行进控制方法及车辆行进控制系统。方法包含:侦测第一车轮的第一转速以及第二车轮的第二转速;侦测第一车轮的第一驱动马达的第一负载电流以及第二车轮的第二驱动马达的第二负载电流;计算第一转速与第二转速的转速差异;以及计算第一负载电流与第二负载电流的负载电流差异;当负载电流差异的绝对值大于负载电流差异临界值,第一负载电流以及第二负载电流其中之一不大于负载电流极值,且转速差异的绝对值大于转速差异临界值时,降低第一车轮的第一转速以及第二车轮的第二转速。本揭露的车辆行进控制方法可省略装设各种复杂的感测器于车辆各部

一种轮对几何参数在线测量系统及其方法.pdf
本发明提供一种轮对几何参数在线测量系统及其方法,系统包括至少一个测量单元,所述测量单元包括至少一组传感器组,每个所述传感器组包括第一结构光传感器和第二结构光传感器,所述第一结构光传感器为多线结构光传感器,所述第一结构光传感器设于所述轮对轨道的内侧,所述第二结构光传感器设于所述轮对轨道的外侧。通过本发明的测量系统,实现了对轮对几何参数的快速、精确的在线测量。
一种列车轮对尺寸在线检测方法及其系统.pdf
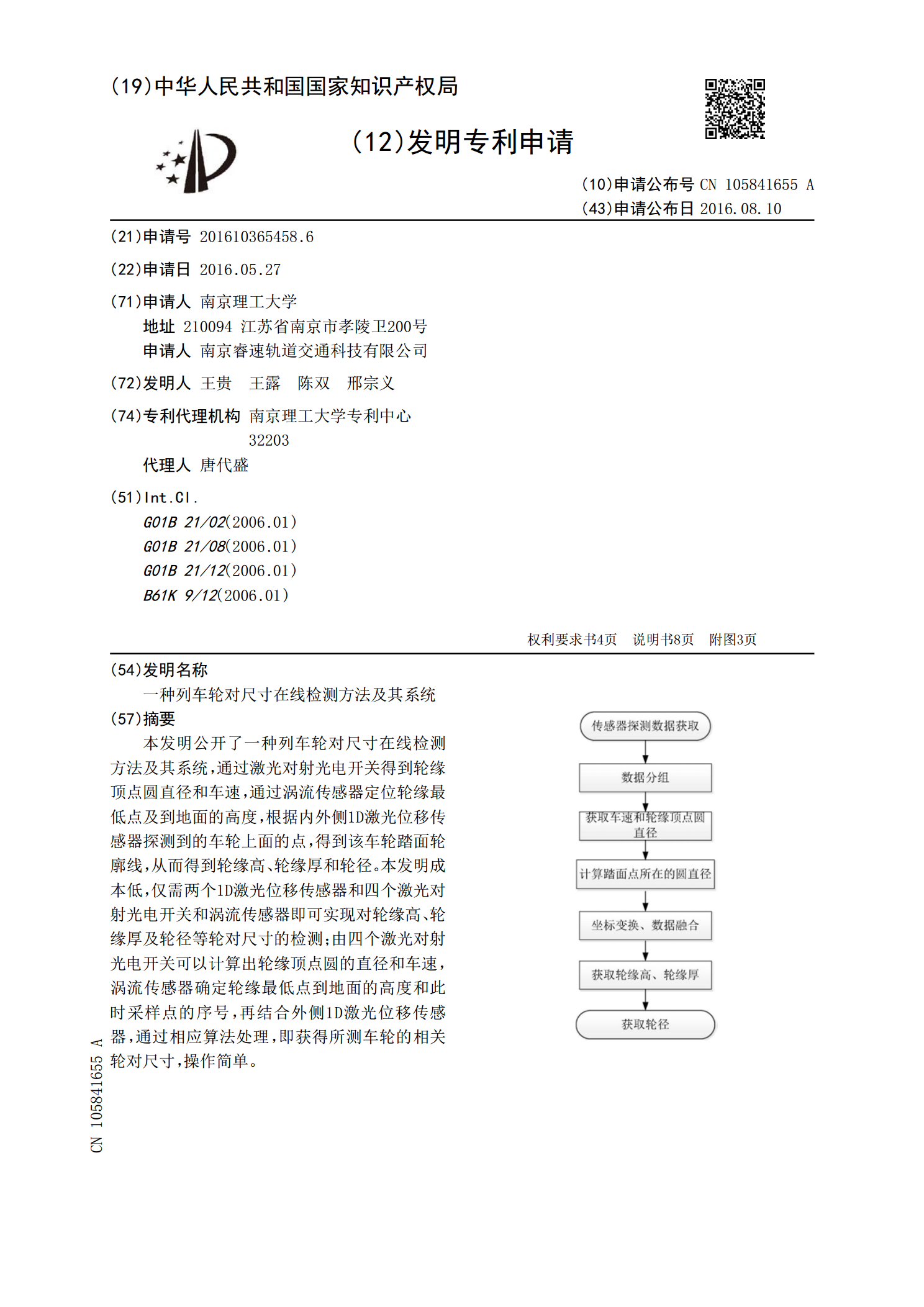
本发明公开了一种列车轮对尺寸在线检测方法及其系统,通过激光对射光电开关得到轮缘顶点圆直径和车速,通过涡流传感器定位轮缘最低点及到地面的高度,根据内外侧1D激光位移传感器探测到的车轮上面的点,得到该车轮踏面轮廓线,从而得到轮缘高、轮缘厚和轮径。本发明成本低,仅需两个1D激光位移传感器和四个激光对射光电开关和涡流传感器即可实现对轮缘高、轮缘厚及轮径等轮对尺寸的检测;由四个激光对射光电开关可以计算出轮缘顶点圆的直径和车速,涡流传感器确定轮缘最低点到地面的高度和此时采样点的序号,再结合外侧1D激光位移传感器,通过