
目标物定位方法、装置、存储介质以及设备.pdf

志信****pp

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标物定位方法、装置、存储介质以及设备.pdf
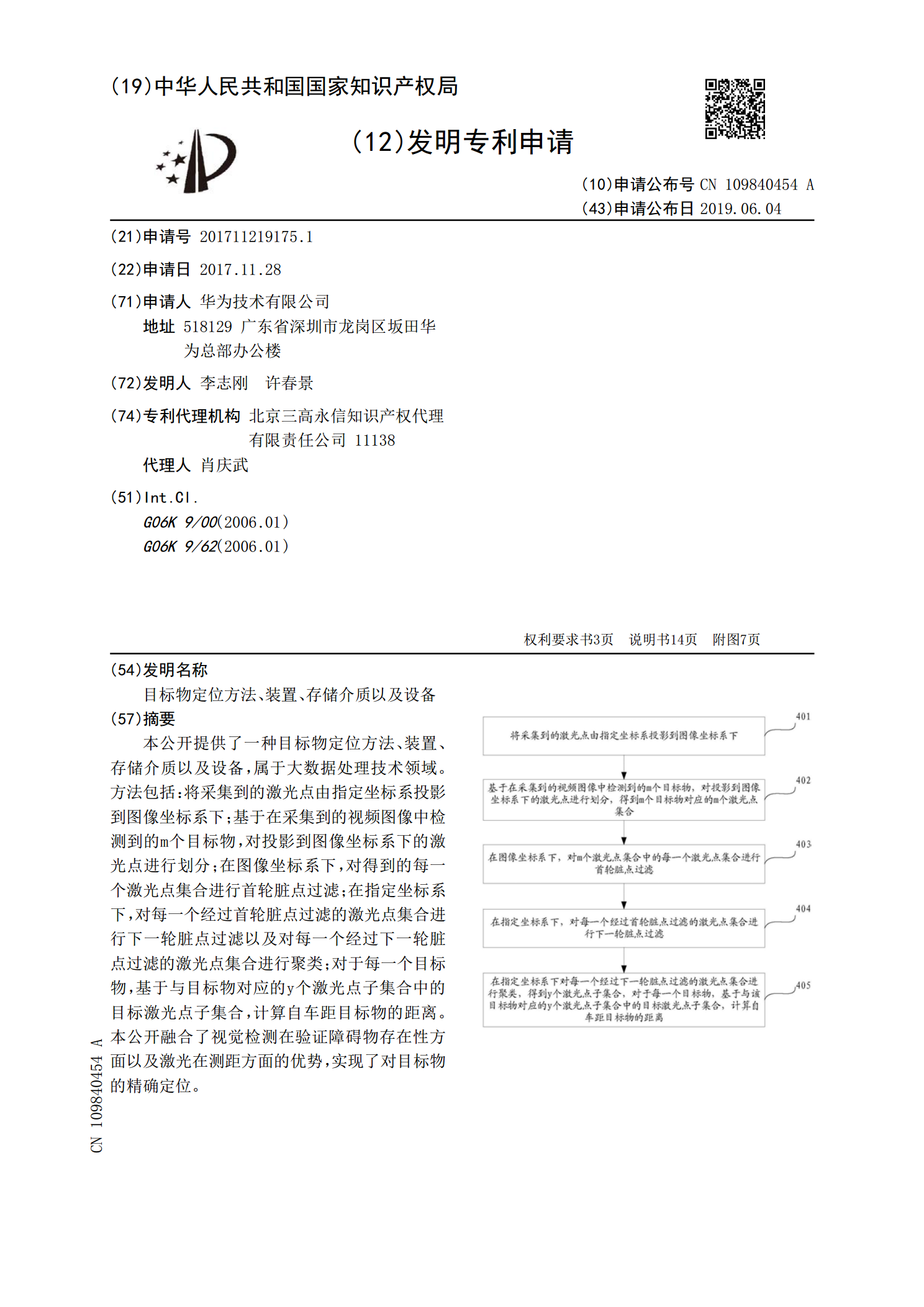
本公开提供了一种目标物定位方法、装置、存储介质以及设备,属于大数据处理技术领域。方法包括:将采集到的激光点由指定坐标系投影到图像坐标系下;基于在采集到的视频图像中检测到的m个目标物,对投影到图像坐标系下的激光点进行划分;在图像坐标系下,对得到的每一个激光点集合进行首轮脏点过滤;在指定坐标系下,对每一个经过首轮脏点过滤的激光点集合进行下一轮脏点过滤以及对每一个经过下一轮脏点过滤的激光点集合进行聚类;对于每一个目标物,基于与目标物对应的y个激光点子集合中的目标激光点子集合,计算自车距目标物的距离。本公开融合了
定位方法及装置、设备、定位系统以及存储介质.pdf
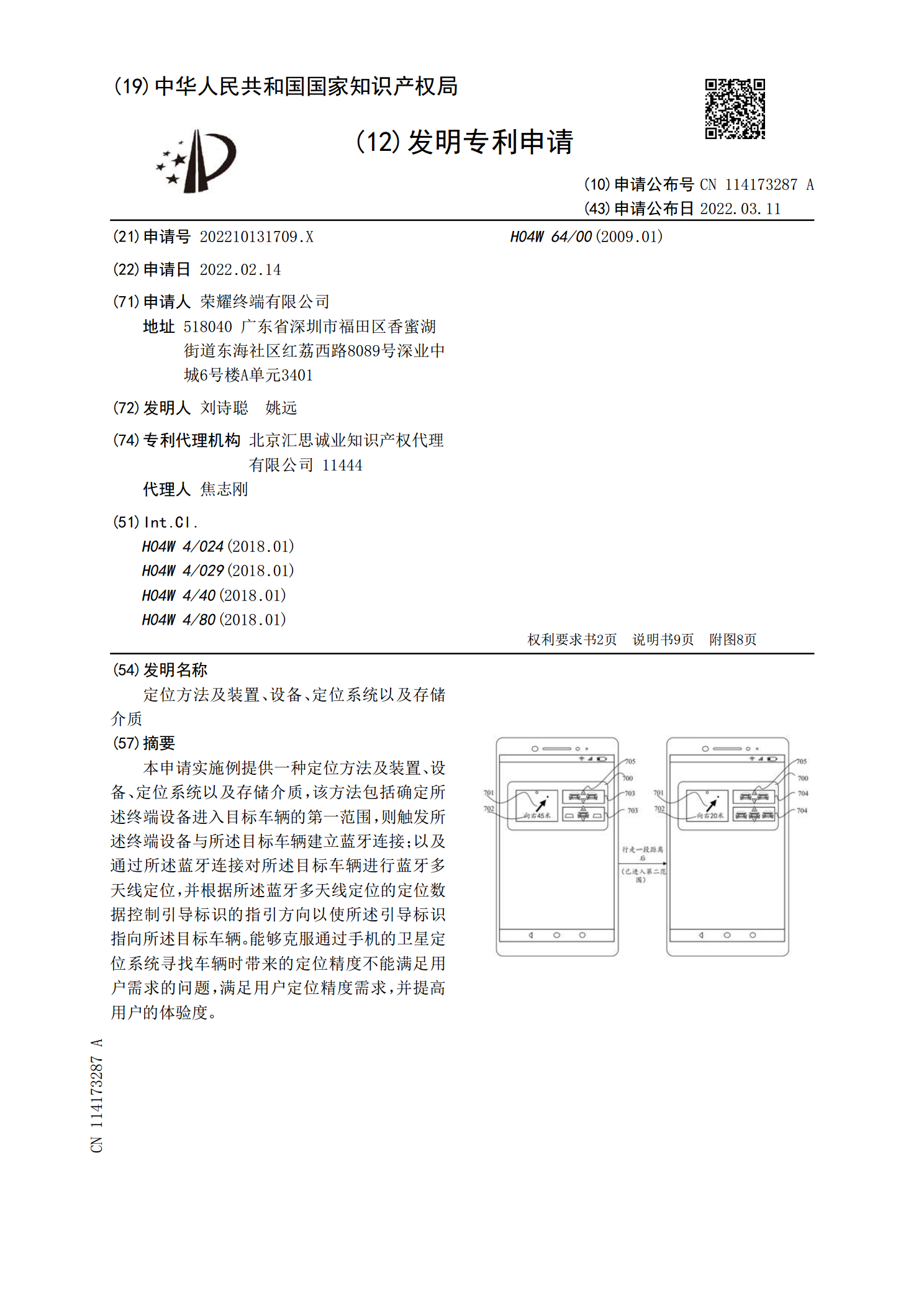
本申请实施例提供一种定位方法及装置、设备、定位系统以及存储介质,该方法包括确定所述终端设备进入目标车辆的第一范围,则触发所述终端设备与所述目标车辆建立蓝牙连接;以及通过所述蓝牙连接对所述目标车辆进行蓝牙多天线定位,并根据所述蓝牙多天线定位的定位数据控制引导标识的指引方向以使所述引导标识指向所述目标车辆。能够克服通过手机的卫星定位系统寻找车辆时带来的定位精度不能满足用户需求的问题,满足用户定位精度需求,并提高用户的体验度。
终端定位方法、装置以及存储介质.pdf
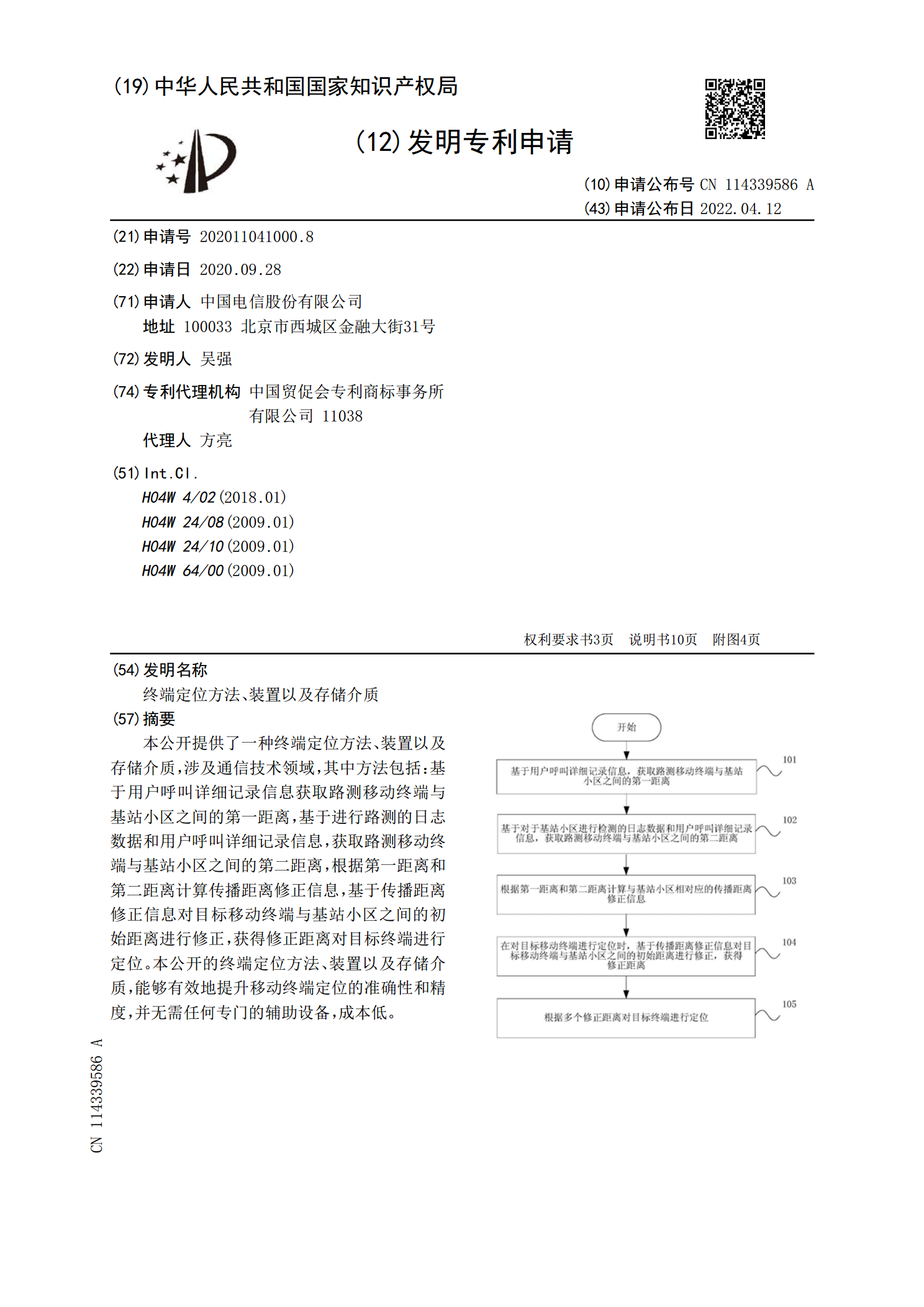
本公开提供了一种终端定位方法、装置以及存储介质,涉及通信技术领域,其中方法包括:基于用户呼叫详细记录信息获取路测移动终端与基站小区之间的第一距离,基于进行路测的日志数据和用户呼叫详细记录信息,获取路测移动终端与基站小区之间的第二距离,根据第一距离和第二距离计算传播距离修正信息,基于传播距离修正信息对目标移动终端与基站小区之间的初始距离进行修正,获得修正距离对目标终端进行定位。本公开的终端定位方法、装置以及存储介质,能够有效地提升移动终端定位的准确性和精度,并无需任何专门的辅助设备,成本低。
目标检测方法、装置、设备以及存储介质.pdf
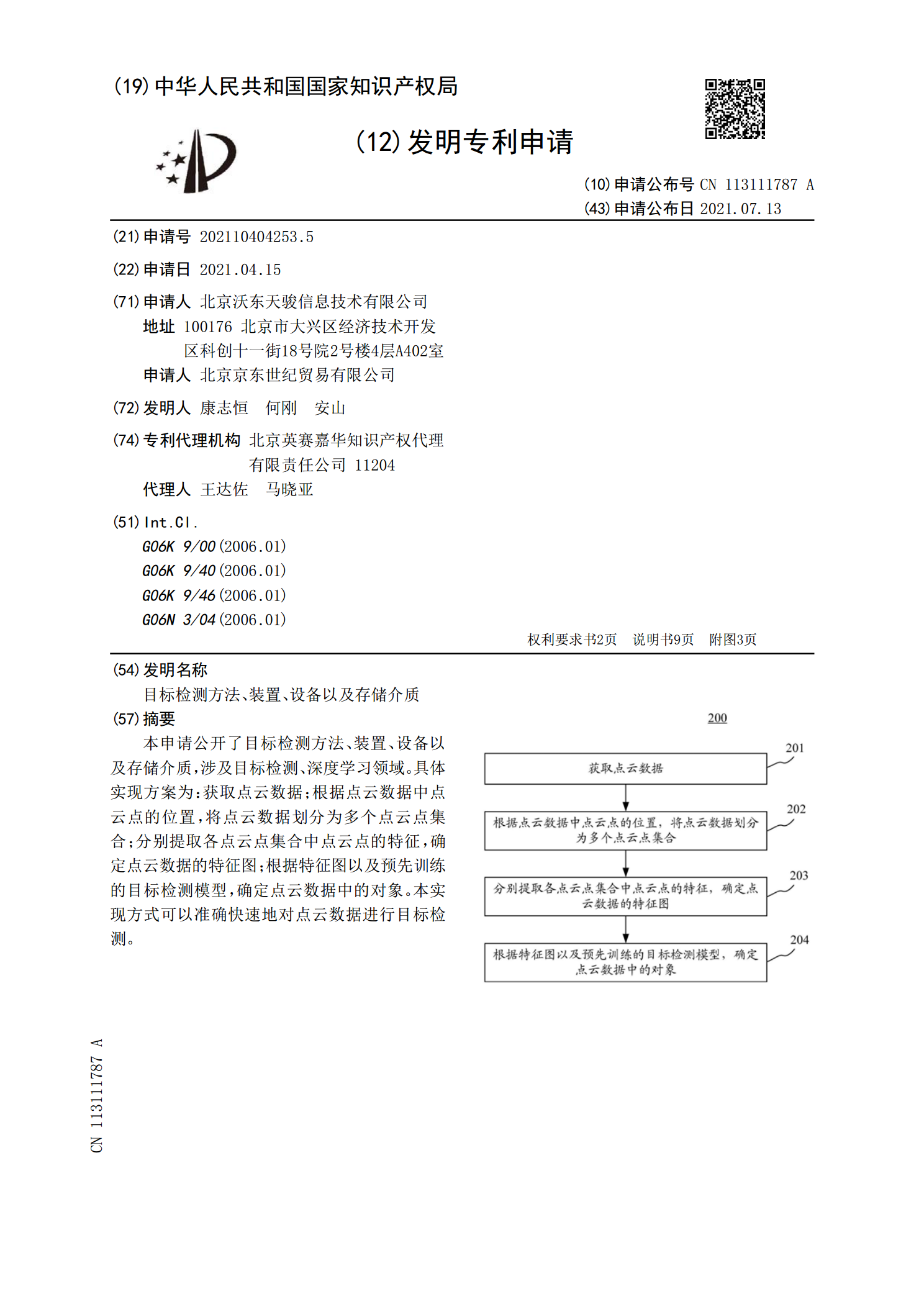
本申请公开了目标检测方法、装置、设备以及存储介质,涉及目标检测、深度学习领域。具体实现方案为:获取点云数据;根据点云数据中点云点的位置,将点云数据划分为多个点云点集合;分别提取各点云点集合中点云点的特征,确定点云数据的特征图;根据特征图以及预先训练的目标检测模型,确定点云数据中的对象。本实现方式可以准确快速地对点云数据进行目标检测。
目标跟踪方法、装置、设备以及存储介质.pdf
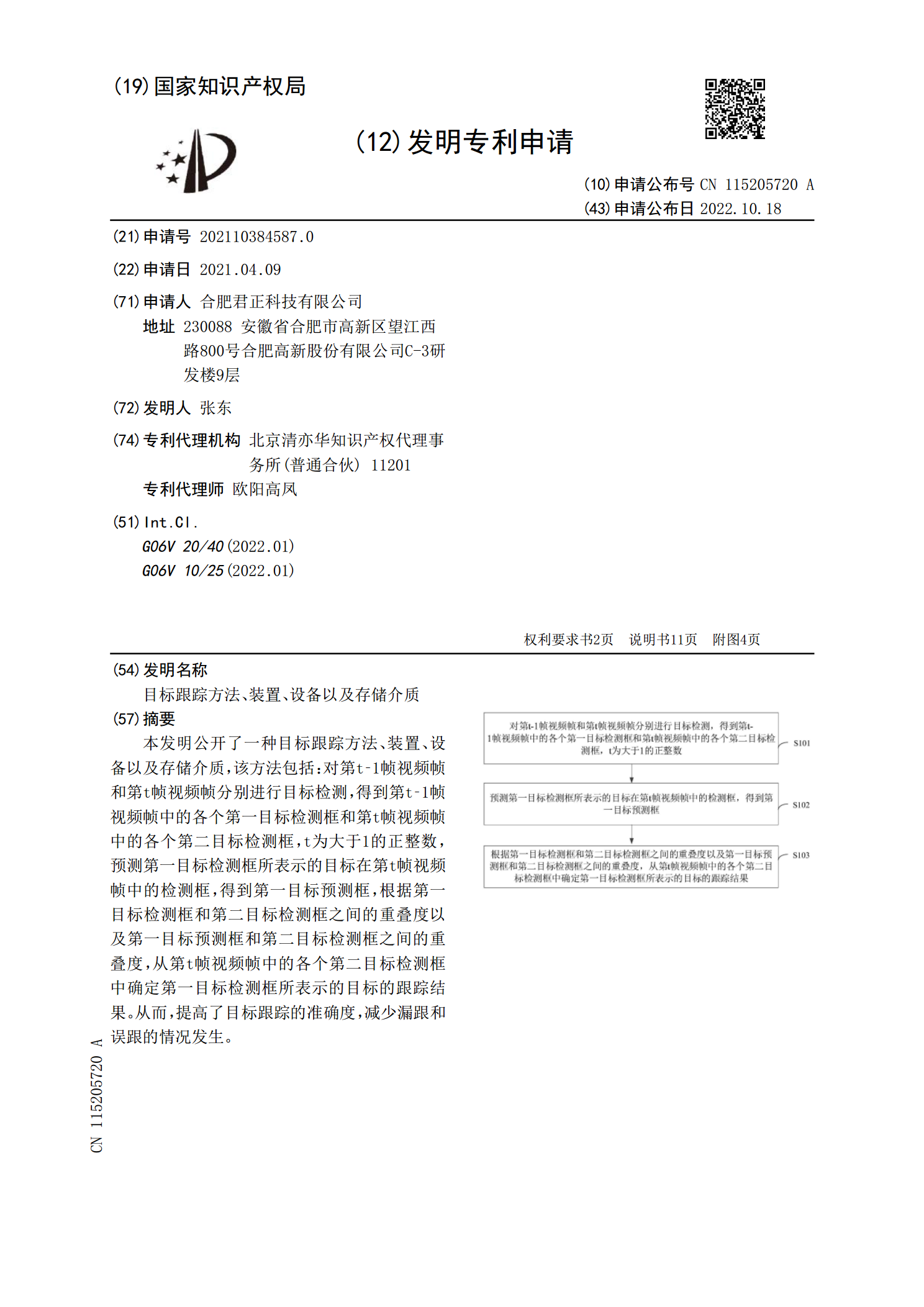
本发明公开了一种目标跟踪方法、装置、设备以及存储介质,该方法包括:对第t?1帧视频帧和第t帧视频帧分别进行目标检测,得到第t?1帧视频帧中的各个第一目标检测框和第t帧视频帧中的各个第二目标检测框,t为大于1的正整数,预测第一目标检测框所表示的目标在第t帧视频帧中的检测框,得到第一目标预测框,根据第一目标检测框和第二目标检测框之间的重叠度以及第一目标预测框和第二目标检测框之间的重叠度,从第t帧视频帧中的各个第二目标检测框中确定第一目标检测框所表示的目标的跟踪结果。从而,提高了目标跟踪的准确度,减少漏跟和误跟