
转向控制方法、装置、车辆及存储介质.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
转向控制方法、装置、车辆及存储介质.pdf
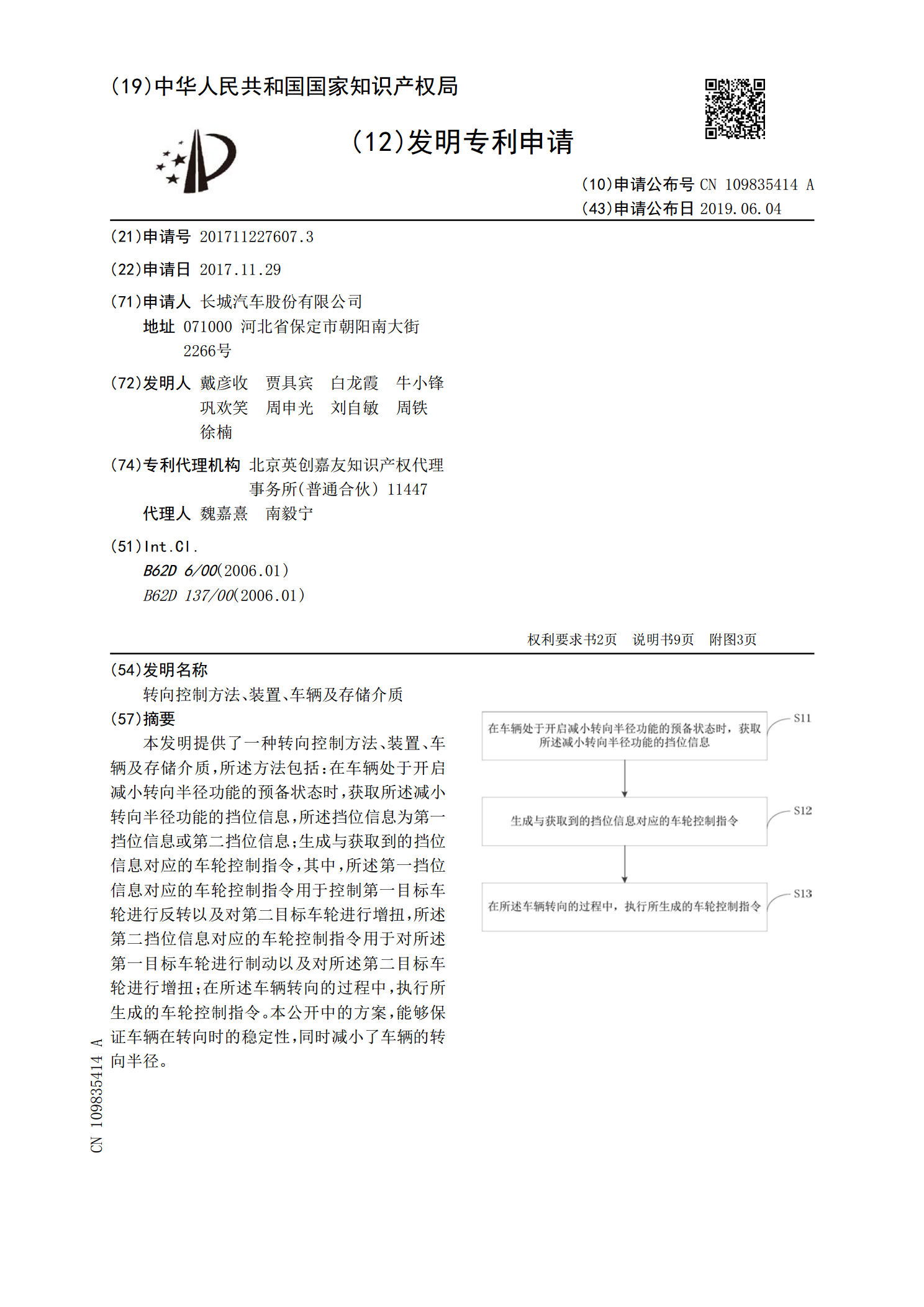
本发明提供了一种转向控制方法、装置、车辆及存储介质,所述方法包括:在车辆处于开启减小转向半径功能的预备状态时,获取所述减小转向半径功能的挡位信息,所述挡位信息为第一挡位信息或第二挡位信息;生成与获取到的挡位信息对应的车轮控制指令,其中,所述第一挡位信息对应的车轮控制指令用于控制第一目标车轮进行反转以及对第二目标车轮进行增扭,所述第二挡位信息对应的车轮控制指令用于对所述第一目标车轮进行制动以及对所述第二目标车轮进行增扭;在所述车辆转向的过程中,执行所生成的车轮控制指令。本公开中的方案,能够保证车辆在转向时的
转向控制方法、装置、车辆及存储介质.pdf
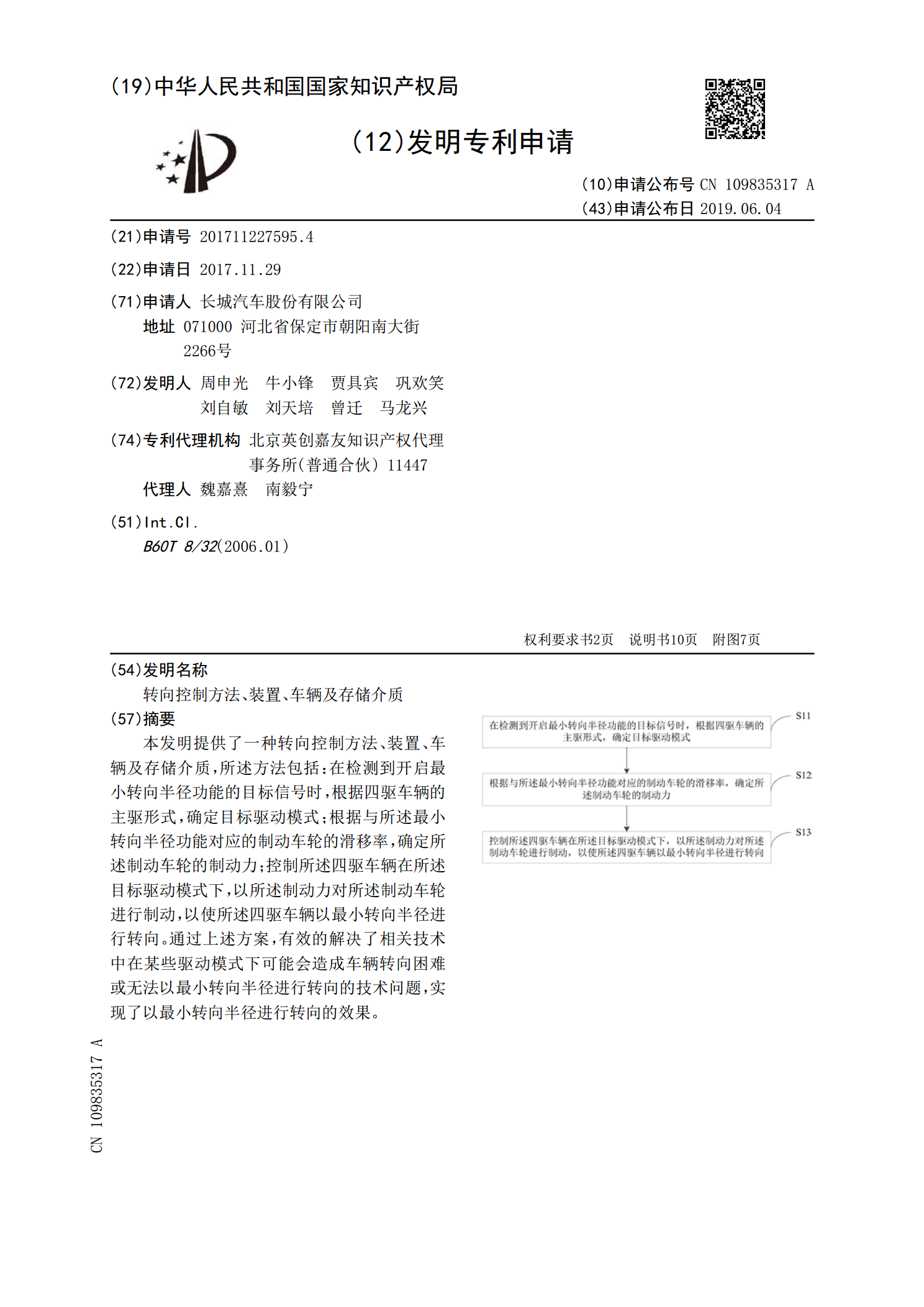
本发明提供了一种转向控制方法、装置、车辆及存储介质,所述方法包括:在检测到开启最小转向半径功能的目标信号时,根据四驱车辆的主驱形式,确定目标驱动模式;根据与所述最小转向半径功能对应的制动车轮的滑移率,确定所述制动车轮的制动力;控制所述四驱车辆在所述目标驱动模式下,以所述制动力对所述制动车轮进行制动,以使所述四驱车辆以最小转向半径进行转向。通过上述方案,有效的解决了相关技术中在某些驱动模式下可能会造成车辆转向困难或无法以最小转向半径进行转向的技术问题,实现了以最小转向半径进行转向的效果。
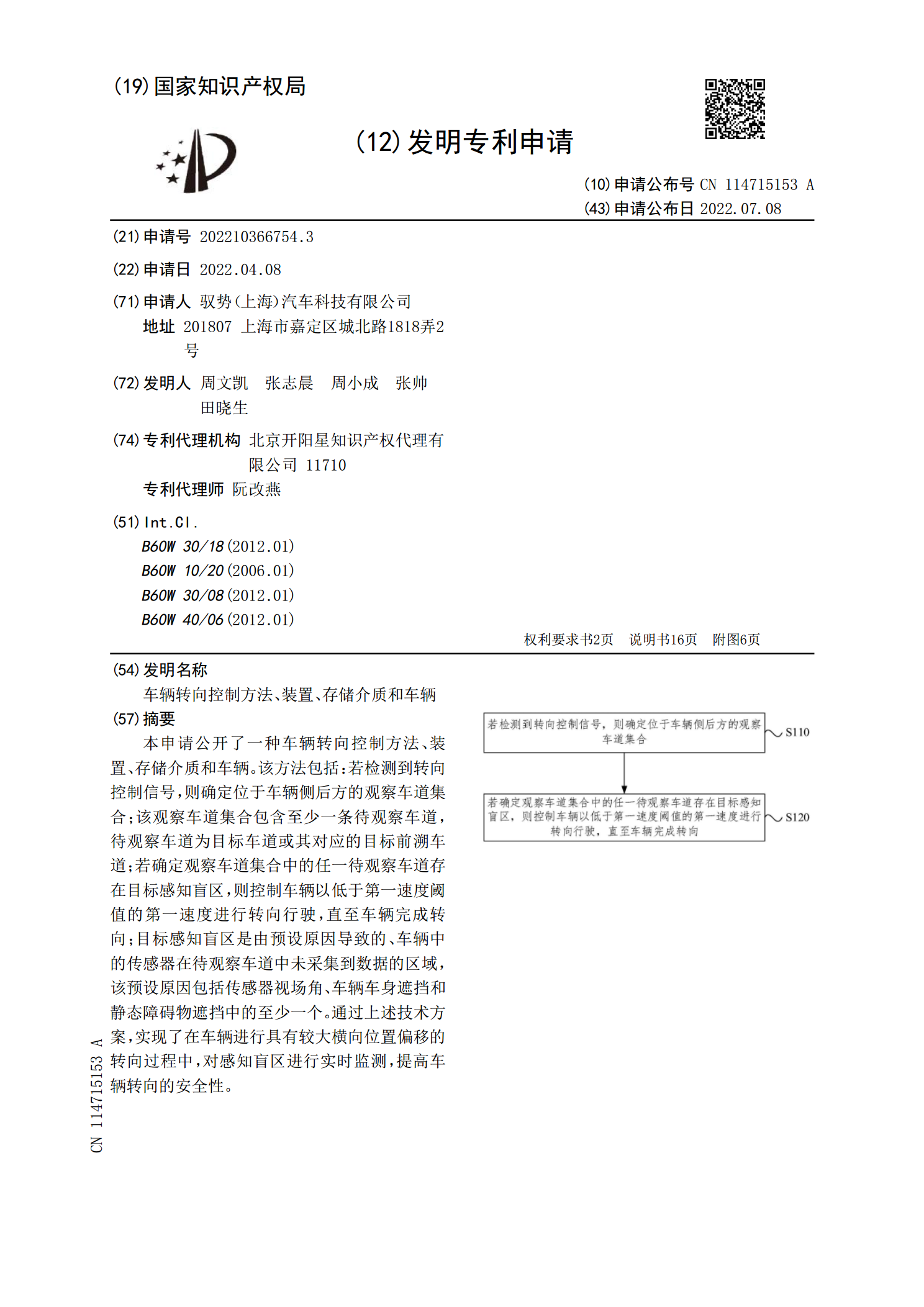
车辆转向控制方法、装置、存储介质和车辆.pdf
本申请公开了一种车辆转向控制方法、装置、存储介质和车辆。该方法包括:若检测到转向控制信号,则确定位于车辆侧后方的观察车道集合;该观察车道集合包含至少一条待观察车道,待观察车道为目标车道或其对应的目标前溯车道;若确定观察车道集合中的任一待观察车道存在目标感知盲区,则控制车辆以低于第一速度阈值的第一速度进行转向行驶,直至车辆完成转向;目标感知盲区是由预设原因导致的、车辆中的传感器在待观察车道中未采集到数据的区域,该预设原因包括传感器视场角、车辆车身遮挡和静态障碍物遮挡中的至少一个。通过上述技术方案,实现了在车
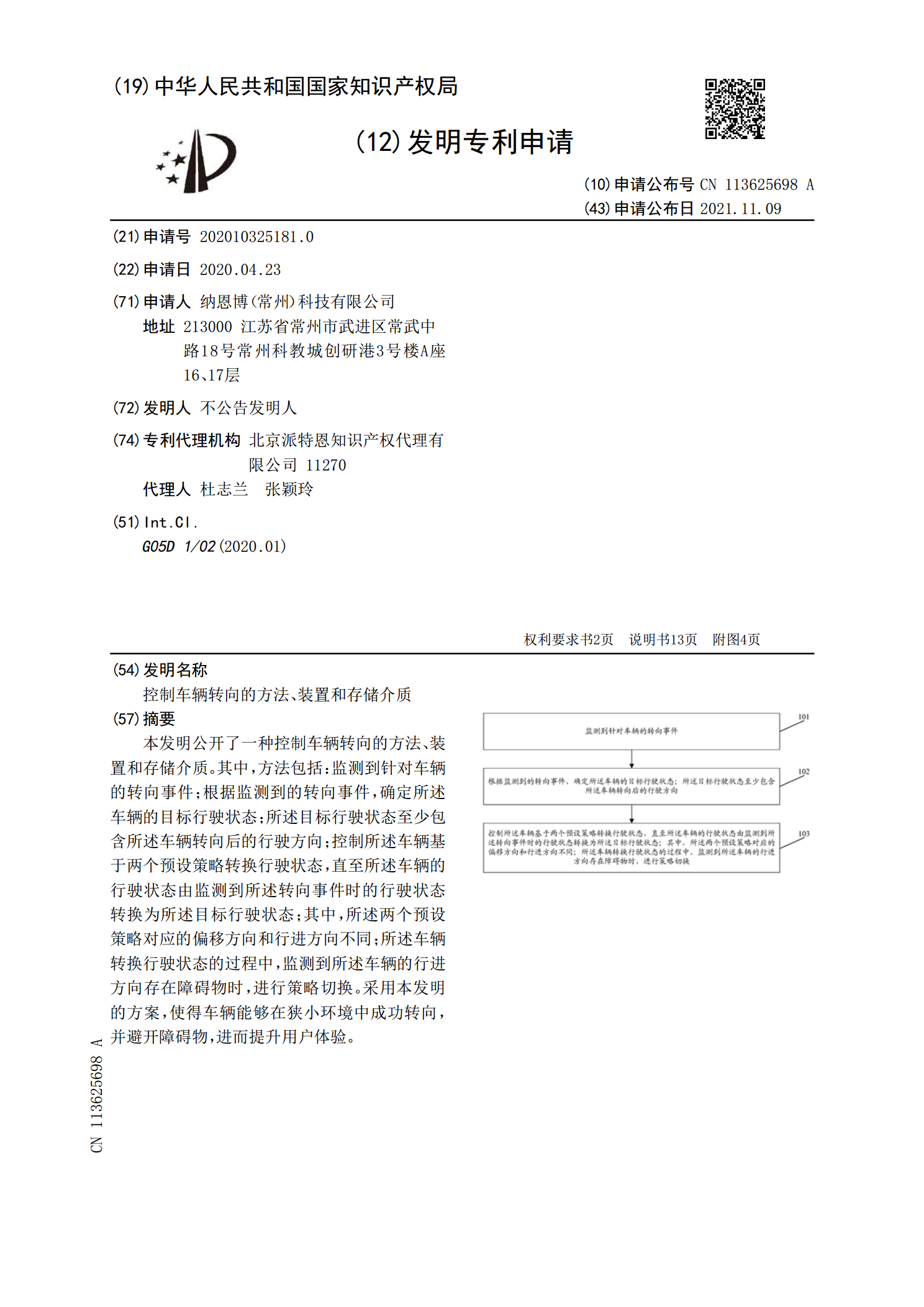
控制车辆转向的方法、装置和存储介质.pdf
本发明公开了一种控制车辆转向的方法、装置和存储介质。其中,方法包括:监测到针对车辆的转向事件;根据监测到的转向事件,确定所述车辆的目标行驶状态;所述目标行驶状态至少包含所述车辆转向后的行驶方向;控制所述车辆基于两个预设策略转换行驶状态,直至所述车辆的行驶状态由监测到所述转向事件时的行驶状态转换为所述目标行驶状态;其中,所述两个预设策略对应的偏移方向和行进方向不同;所述车辆转换行驶状态的过程中,监测到所述车辆的行进方向存在障碍物时,进行策略切换。采用本发明的方案,使得车辆能够在狭小环境中成功转向,并避开障碍
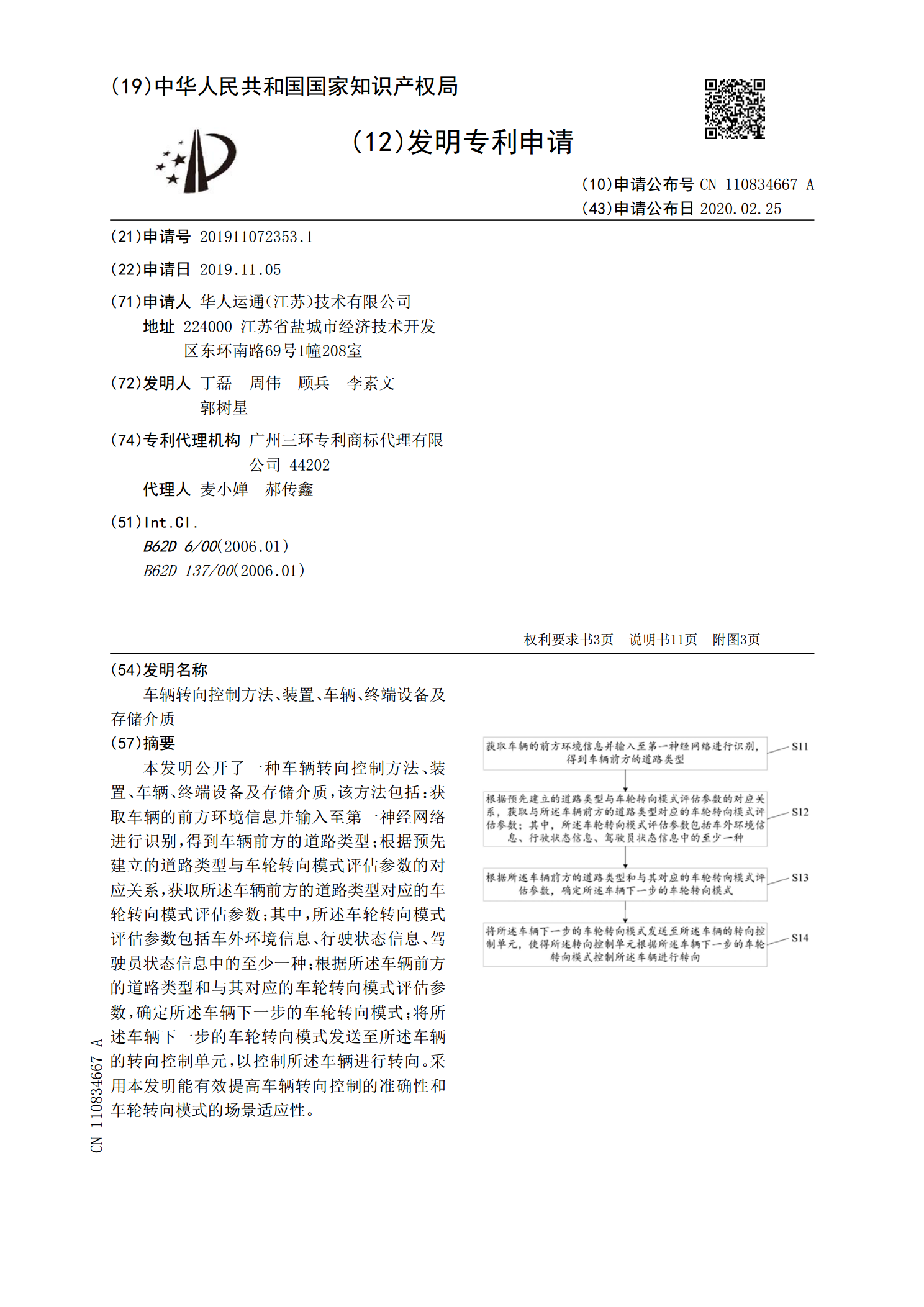
车辆转向控制方法、装置、车辆、终端设备及存储介质.pdf
本发明公开了一种车辆转向控制方法、装置、车辆、终端设备及存储介质,该方法包括:获取车辆的前方环境信息并输入至第一神经网络进行识别,得到车辆前方的道路类型;根据预先建立的道路类型与车轮转向模式评估参数的对应关系,获取所述车辆前方的道路类型对应的车轮转向模式评估参数;其中,所述车轮转向模式评估参数包括车外环境信息、行驶状态信息、驾驶员状态信息中的至少一种;根据所述车辆前方的道路类型和与其对应的车轮转向模式评估参数,确定所述车辆下一步的车轮转向模式;将所述车辆下一步的车轮转向模式发送至所述车辆的转向控制单元,以