
一种鱼眼镜头内部参数自标定方法.pdf

秋花****姐姐


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种鱼眼镜头内部参数自标定方法.pdf
本发明提出一种鱼眼镜头内部参数自标定方法,该方法包括:建立鱼眼成像模型并获得待标定的鱼眼镜头内部参数;根据空间直线在水平面的理想投影椭圆约束建立标定方程;利用鱼眼图像有效区域椭圆轮廓边界及空间直线在鱼眼图像上的投影椭圆弧段信息给出待标定的鱼眼镜头内部参数初值并迭代求解标定方程获得标定参数的最小二乘估计。本发明以空间直线在水平面的理想投影椭圆约束为基础建立标定方程估计鱼眼镜头内部参数,标定计算不涉及相机外部参数,不仅避免了过参数化问题,其标定参数更精确地表征球面透视投影模型,且标定计算形式、过程统一、精度高

全景立体球视觉下的鱼眼镜头参数标定方法.docx
全景立体球视觉下的鱼眼镜头参数标定方法论文题目:全景立体球视觉下的鱼眼镜头参数标定方法摘要:全景立体球视觉在虚拟现实、增强现实等领域具有广泛的应用前景。而鱼眼镜头作为全景立体球视觉中常用的镜头类型之一,对于实现高质量的全景图像具有重要的作用。本文旨在研究全景立体球视觉下的鱼眼镜头参数标定方法,通过对鱼眼镜头的校正,提高全景图像的质量和对应关系的准确性。1.引言全景立体球视觉技术是指在视觉效果上具备全景覆盖、立体感以及球面投影的一种图像渲染技术。鱼眼镜头作为全景立体球视觉中常见的镜头类型,具有广泛的应用前景
一种鱼眼镜头的标定方法.pdf
本发明公开了一种鱼眼镜头的标定方法,包括以下步骤:1)进行棋盘格参数解析;2)拍摄棋盘格图片,并读取图像集;3)检测棋格盘的角点,并计算棋格盘的物理坐标;4)搜圆,确定像素坐标的圆心坐标以及中心漂移,计算获得投影点的像素坐标;5)标定数据格式转换,测量棋盘格点的数据,建立棋盘格到每张拍摄图像的棋盘格坐标对应关系;6)执行标定。本发明通过通过采集棋盘格图片,多尺度检测角点,然后提取有效成像圆心半径,建立角点3D物理坐标与像素坐标的投影变换关系,再基于球面模型构造重投影误差最小化目标函数,进行分步优化标定镜头
双目鱼眼相机的参数标定方法、装置、设备及存储介质.pdf
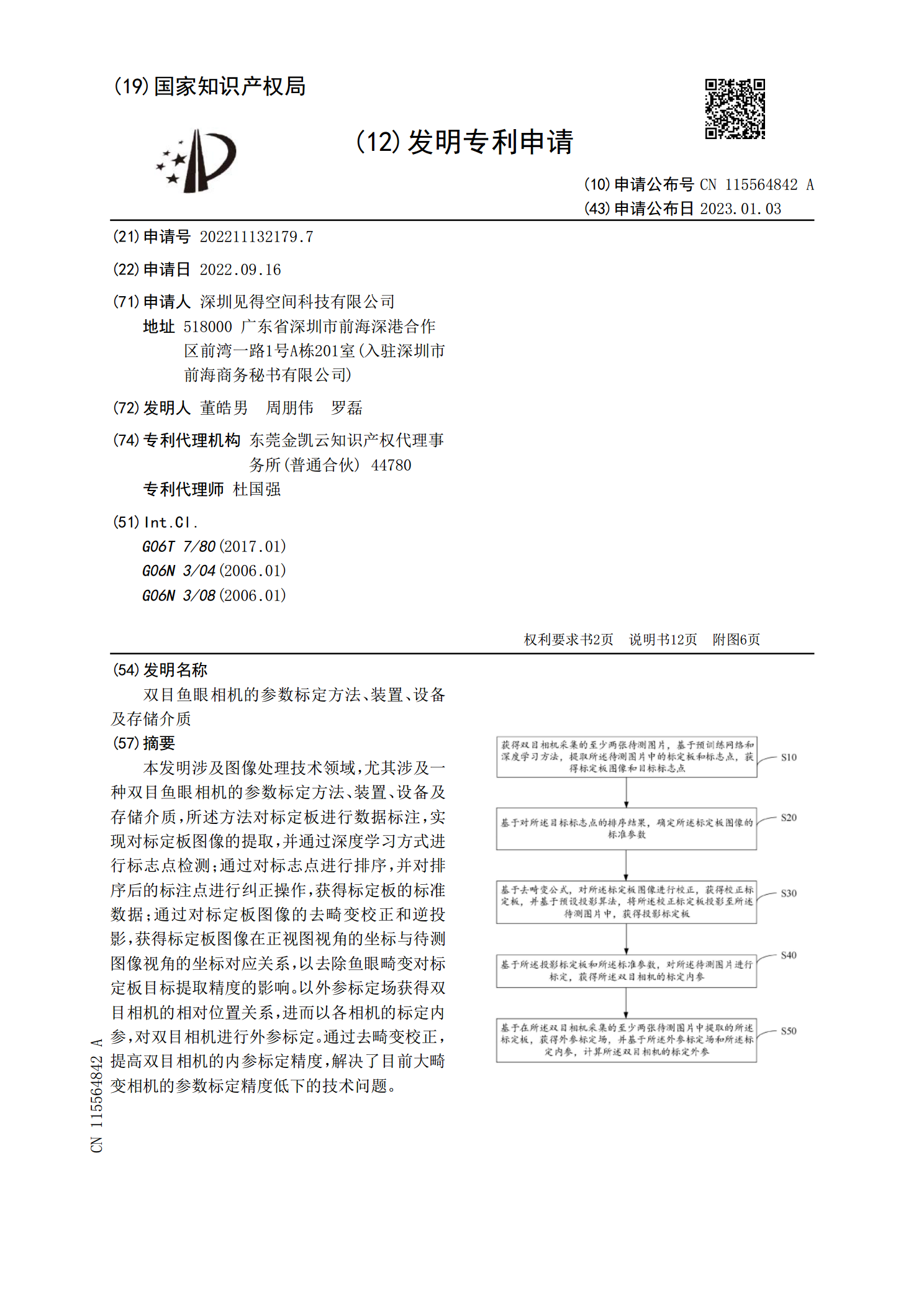
本发明涉及图像处理技术领域,尤其涉及一种双目鱼眼相机的参数标定方法、装置、设备及存储介质,所述方法对标定板进行数据标注,实现对标定板图像的提取,并通过深度学习方式进行标志点检测;通过对标志点进行排序,并对排序后的标注点进行纠正操作,获得标定板的标准数据;通过对标定板图像的去畸变校正和逆投影,获得标定板图像在正视图视角的坐标与待测图像视角的坐标对应关系,以去除鱼眼畸变对标定板目标提取精度的影响。以外参标定场获得双目相机的相对位置关系,进而以各相机的标定内参,对双目相机进行外参标定。通过去畸变校正,提高双目相

基于分离参数标定的鱼眼镜头成像模型研究.docx
基于分离参数标定的鱼眼镜头成像模型研究基于分离参数标定的鱼眼镜头成像模型研究摘要:鱼眼镜头作为一种特殊的广角镜头,在多个领域中得到广泛应用。然而,鱼眼镜头的畸变问题一直是制约其精确成像的重要因素。本文针对鱼眼镜头的畸变问题展开研究,提出了基于分离参数标定的鱼眼镜头成像模型,并通过实验验证了该模型的有效性。关键词:鱼眼镜头;畸变;成像模型;分离参数标定1.引言鱼眼镜头由于其特殊的广角度和大视场特性,被广泛应用于摄影、无人机航拍、机器视觉等领域。然而,鱼眼镜头在成像过程中会引入严重的畸变,导致图像失真严重,影