
全景立体球视觉下的鱼眼镜头参数标定方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全景立体球视觉下的鱼眼镜头参数标定方法.docx
全景立体球视觉下的鱼眼镜头参数标定方法论文题目:全景立体球视觉下的鱼眼镜头参数标定方法摘要:全景立体球视觉在虚拟现实、增强现实等领域具有广泛的应用前景。而鱼眼镜头作为全景立体球视觉中常用的镜头类型之一,对于实现高质量的全景图像具有重要的作用。本文旨在研究全景立体球视觉下的鱼眼镜头参数标定方法,通过对鱼眼镜头的校正,提高全景图像的质量和对应关系的准确性。1.引言全景立体球视觉技术是指在视觉效果上具备全景覆盖、立体感以及球面投影的一种图像渲染技术。鱼眼镜头作为全景立体球视觉中常见的镜头类型,具有广泛的应用前景

全景立体球视觉装置的镜头位置校准方法研究.docx
全景立体球视觉装置的镜头位置校准方法研究全景立体球视觉装置是一种高级的视觉设备,它集成了多个摄像头、光学透镜和图像处理器,可以同时捕捉整个场景的360度全景图像,并将其转换为立体图像,实现三维空间的效果。然而,由于每个摄像头的位置和方向都不同,这些图像可能存在畸变和重叠,并且需要对其进行校准。本文将介绍几种常见的全景立体球视觉装置的镜头位置校准方法,并探讨其优劣之处。一、传统的基于物体特征的校准方法这种方法是最早引入的校准方法。它通过检测相邻图像的特征点,如边缘、直线、角点等,来确定相机的位置和方向。这个

基于鱼眼镜头的全方位视觉参数标定与畸变矫正.docx
基于鱼眼镜头的全方位视觉参数标定与畸变矫正摘要本文研究基于鱼眼镜头的全方位视觉参数标定与畸变矫正技术,主要针对鱼眼镜头在图像拍摄中所产生的畸变问题进行分析和处理。首先介绍了鱼眼镜头的特点和工作原理,然后分析了鱼眼镜头的畸变类型和产生原因。接着,提出了基于全方位视觉参数标定的方法来校正畸变,并且详细讲解了该方法的步骤和流程。最后,进行了实验验证,并对结果进行了分析和讨论。关键词:鱼眼镜头;畸变矫正;全方位视觉参数标定;图像处理引言随着计算机视觉技术的不断发展和应用,鱼眼镜头在图像获取和处理中扮演着越来越重要

基于鱼眼镜头的全方位视觉系统参数标定方法研究的任务书.docx
基于鱼眼镜头的全方位视觉系统参数标定方法研究的任务书任务书一、任务背景随着智能制造、无人驾驶等技术的发展,全方位视觉技术在其中扮演着重要的角色。通过全方位视觉系统,能够实现对环境中目标物体的全方位感知和识别,为机器自主决策提供更加全面的信息支持。而基于鱼眼镜头的全方位视觉系统则具有视野广阔、信息量大等优点,因此越来越受到研究人员的关注。然而,在实际应用中,由于鱼眼镜头的畸变特性和镜头与相机之间的位置关系等因素,对于从全方位视觉系统获取的图像进行准确的定位、识别等操作是具有挑战性的。因此,在进行全方位视觉系
一种鱼眼镜头内部参数自标定方法.pdf
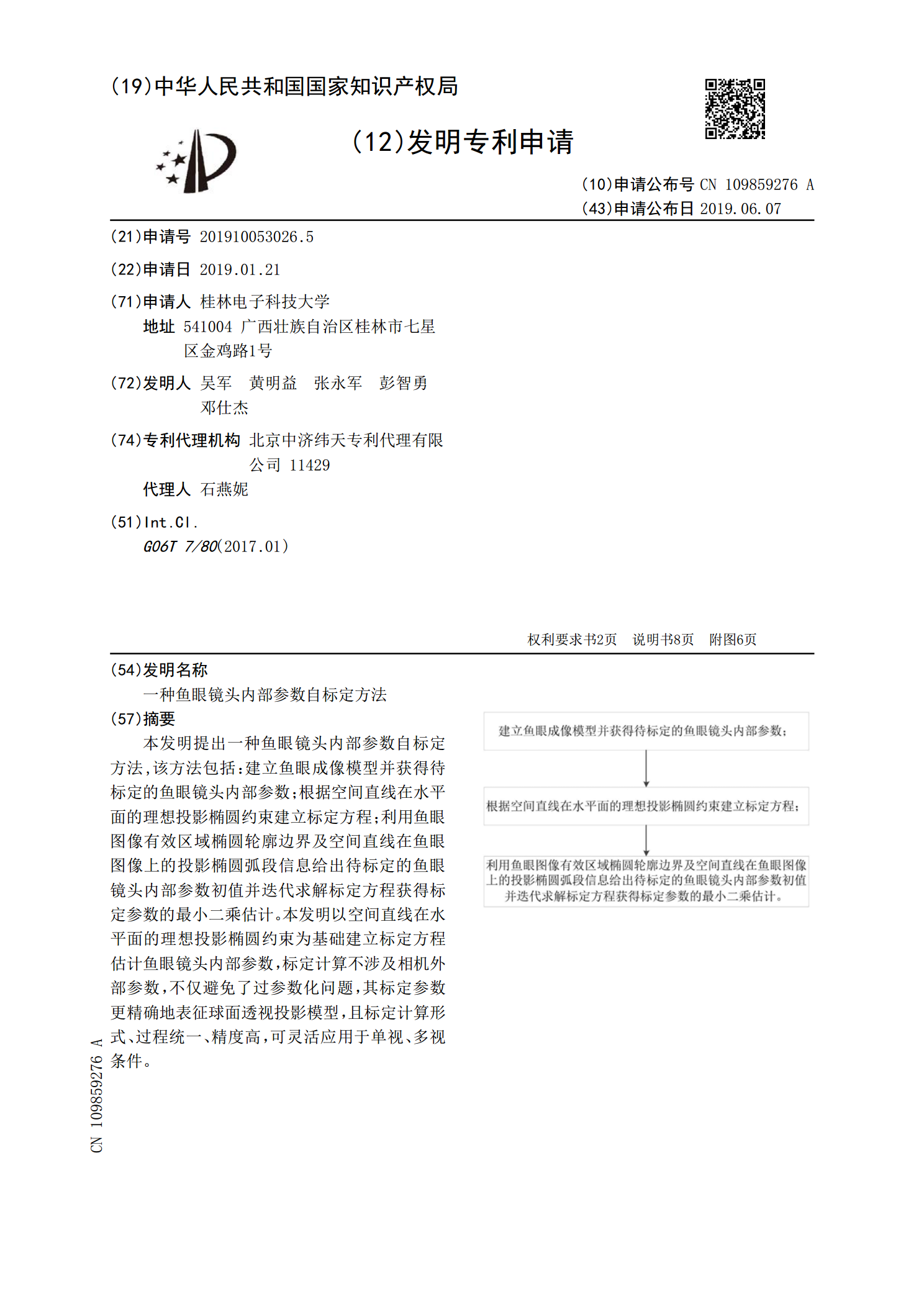
本发明提出一种鱼眼镜头内部参数自标定方法,该方法包括:建立鱼眼成像模型并获得待标定的鱼眼镜头内部参数;根据空间直线在水平面的理想投影椭圆约束建立标定方程;利用鱼眼图像有效区域椭圆轮廓边界及空间直线在鱼眼图像上的投影椭圆弧段信息给出待标定的鱼眼镜头内部参数初值并迭代求解标定方程获得标定参数的最小二乘估计。本发明以空间直线在水平面的理想投影椭圆约束为基础建立标定方程估计鱼眼镜头内部参数,标定计算不涉及相机外部参数,不仅避免了过参数化问题,其标定参数更精确地表征球面透视投影模型,且标定计算形式、过程统一、精度高