
一种基于视觉SLAM方法的自主导航小车.pdf

一条****轩吗


1/8

2/8
3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉SLAM方法的自主导航小车.pdf
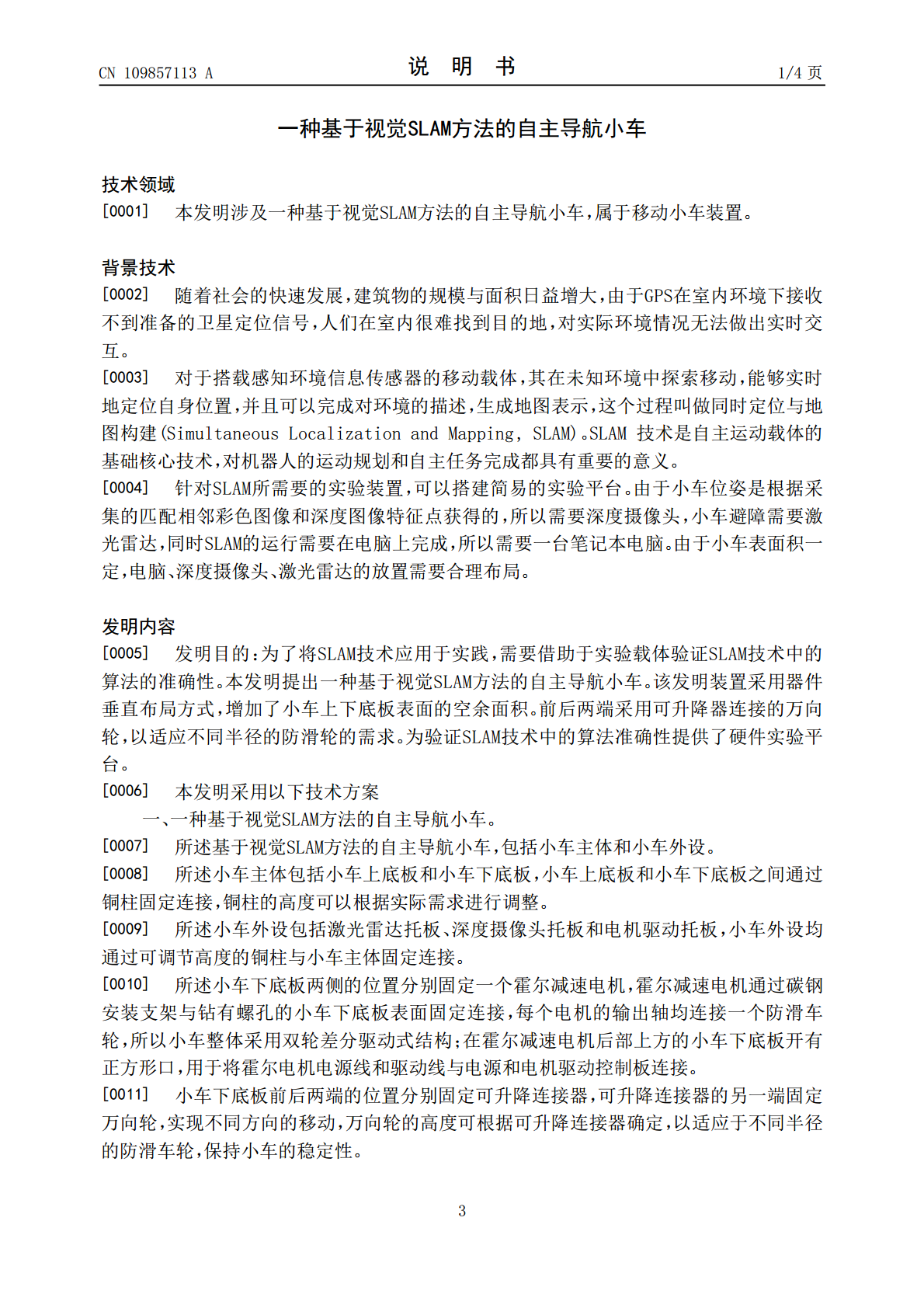
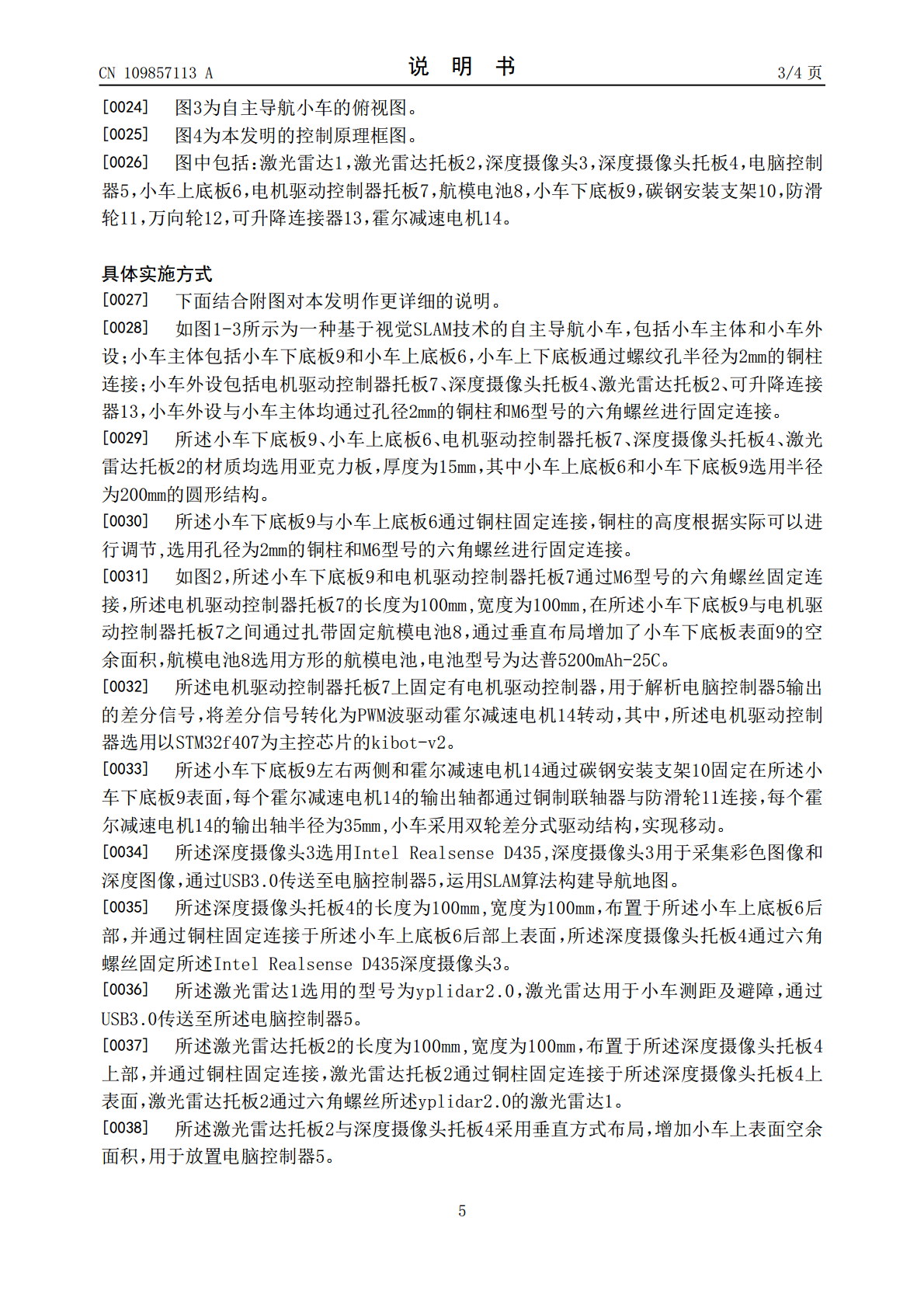
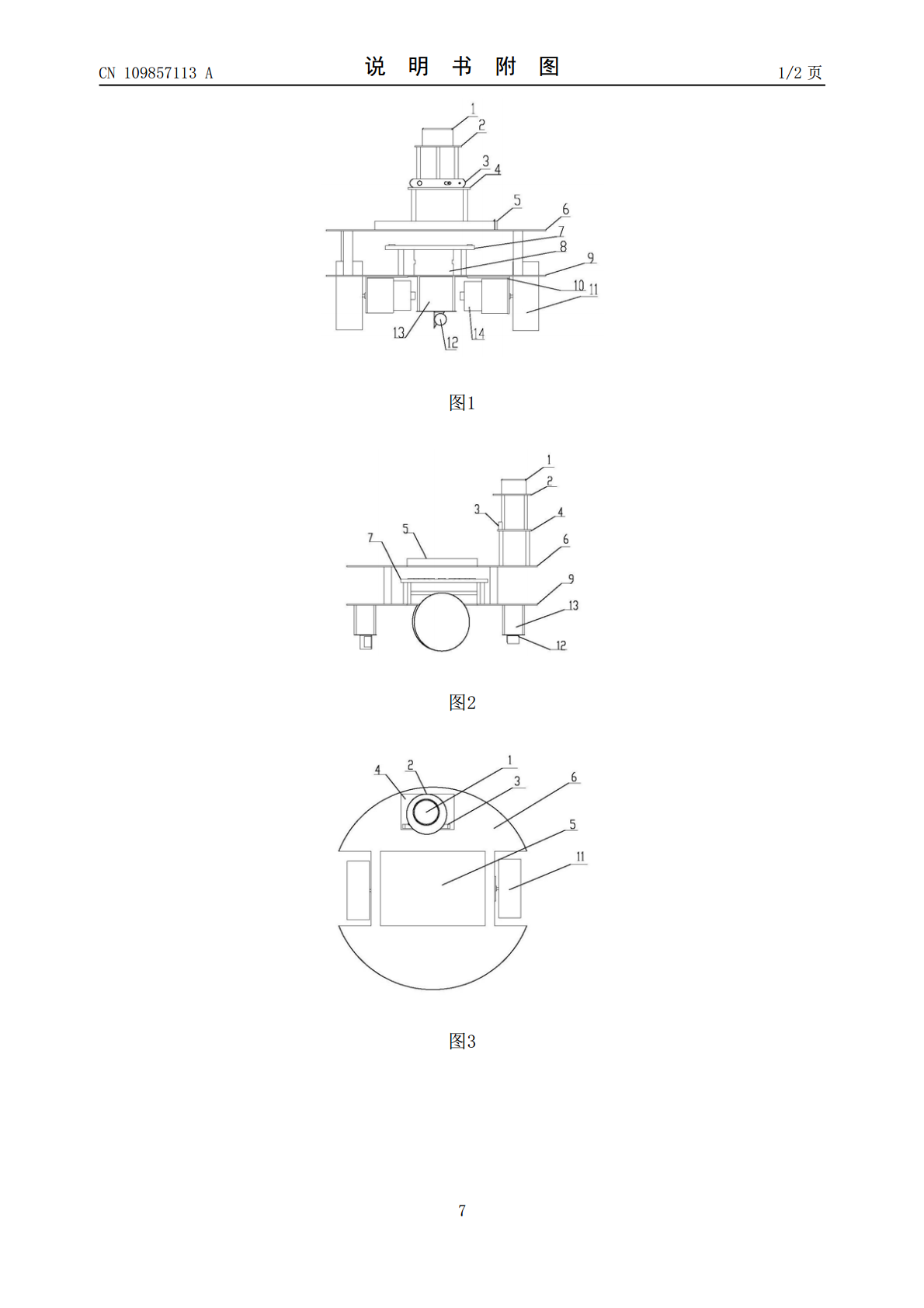
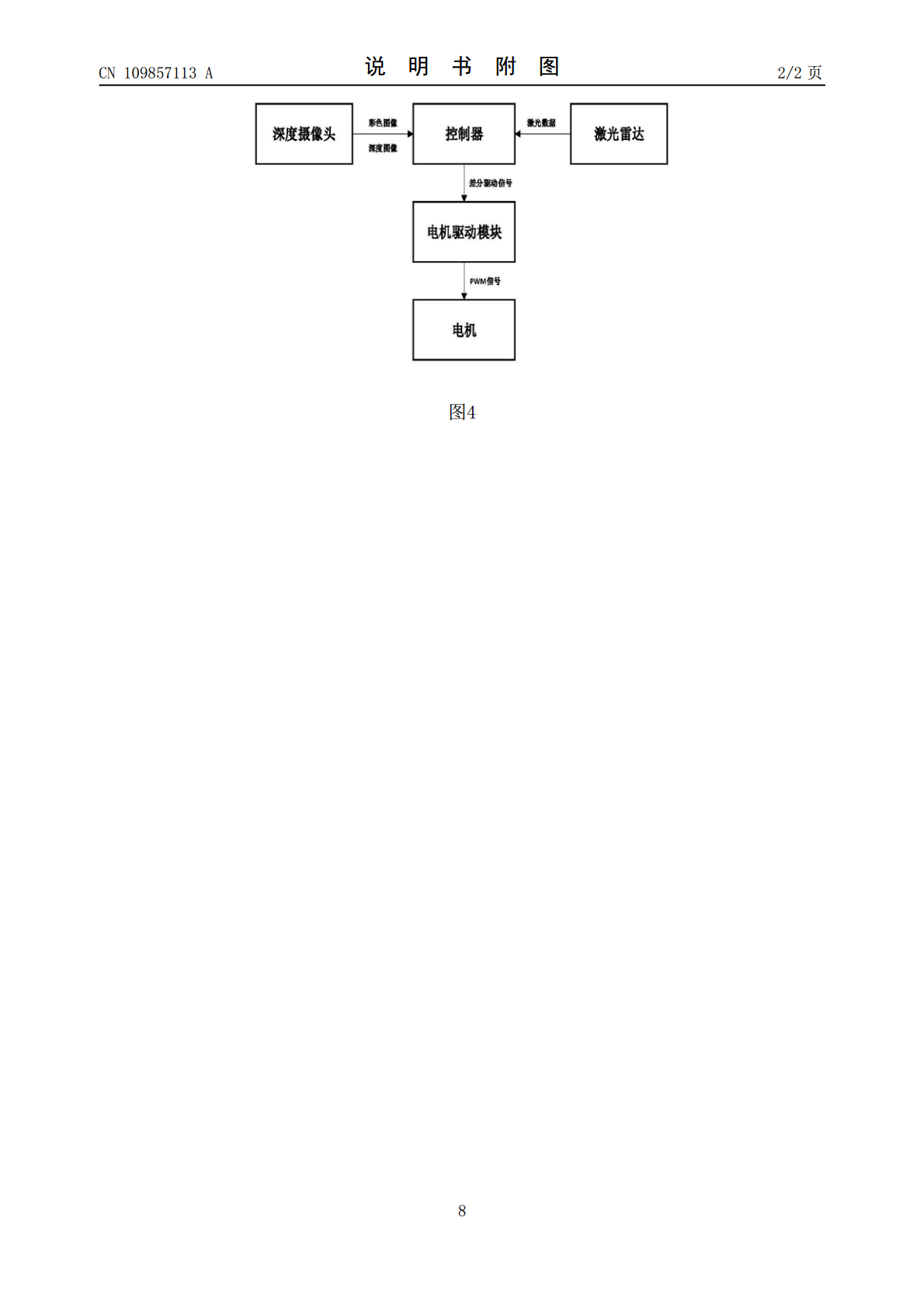
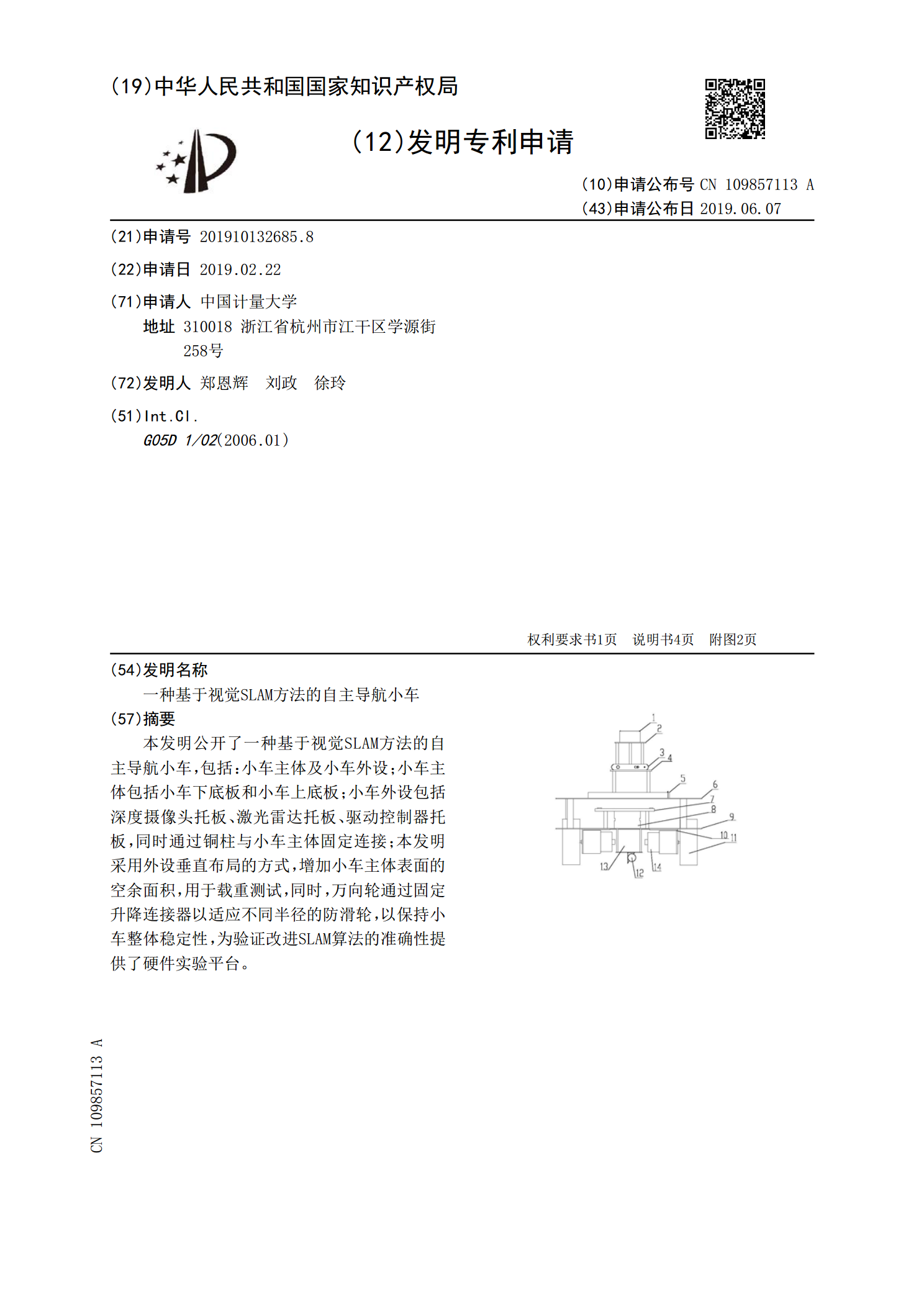
本发明公开了一种基于视觉SLAM方法的自主导航小车,包括:小车主体及小车外设;小车主体包括小车下底板和小车上底板;小车外设包括深度摄像头托板、激光雷达托板、驱动控制器托板,同时通过铜柱与小车主体固定连接;本发明采用外设垂直布局的方式,增加小车主体表面的空余面积,用于载重测试,同时,万向轮通过固定升降连接器以适应不同半径的防滑轮,以保持小车整体稳定性,为验证改进SLAM算法的准确性提供了硬件实验平台。
基于SLAM技术的车库自主导航装置及导航方法.pdf
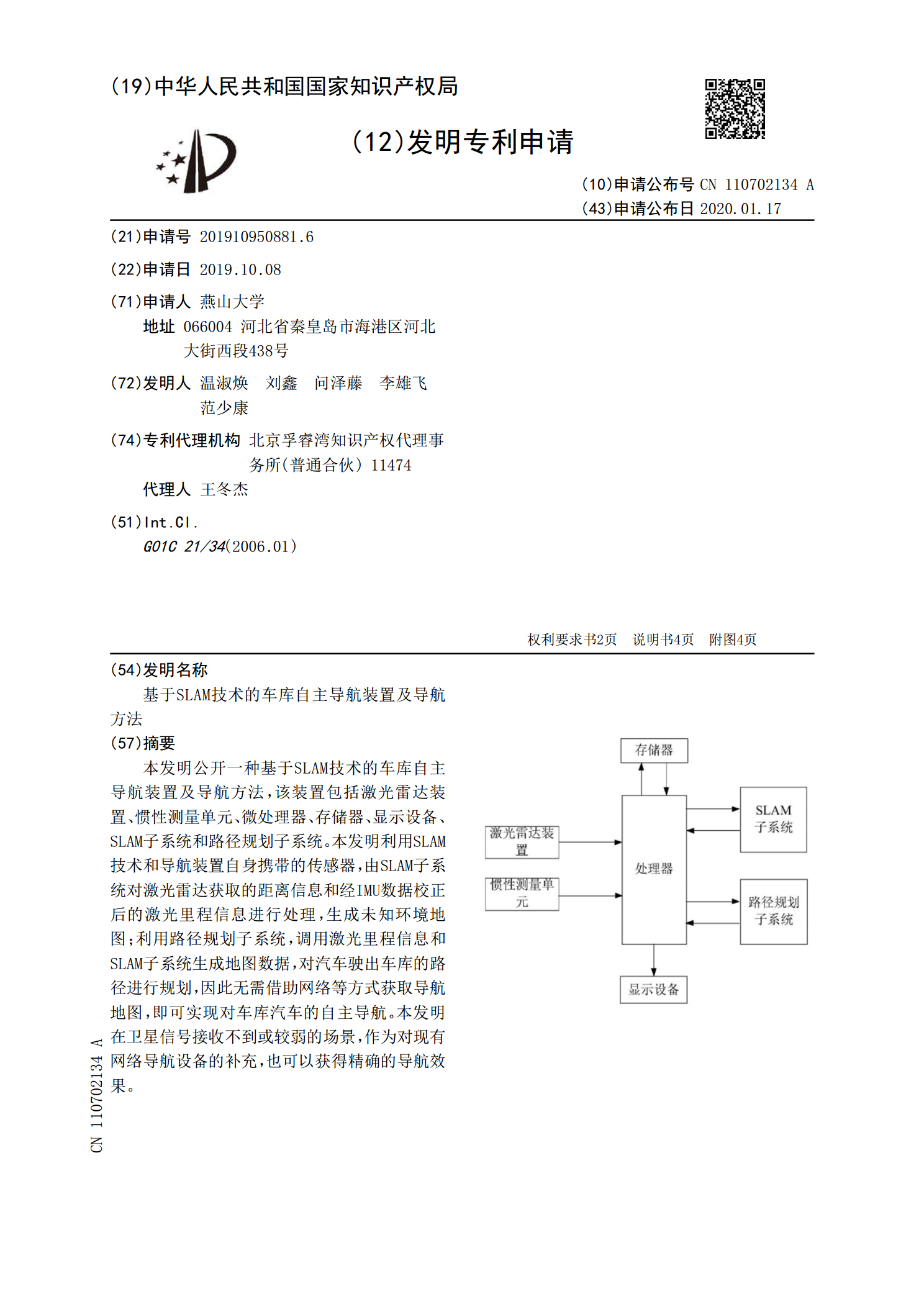
本发明公开一种基于SLAM技术的车库自主导航装置及导航方法,该装置包括激光雷达装置、惯性测量单元、微处理器、存储器、显示设备、SLAM子系统和路径规划子系统。本发明利用SLAM技术和导航装置自身携带的传感器,由SLAM子系统对激光雷达获取的距离信息和经IMU数据校正后的激光里程信息进行处理,生成未知环境地图;利用路径规划子系统,调用激光里程信息和SLAM子系统生成地图数据,对汽车驶出车库的路径进行规划,因此无需借助网络等方式获取导航地图,即可实现对车库汽车的自主导航。本发明在卫星信号接收不到或较弱的场景,

基于视觉SLAM和人工标记码的定位与导航方法研究.docx
基于视觉SLAM和人工标记码的定位与导航方法研究基于视觉SLAM和人工标记码的定位与导航方法研究摘要:随着无人驾驶和机器人技术的快速发展,定位与导航一直是一个关键的问题。本文提出了一种基于视觉SLAM和人工标记码的定位与导航方法。该方法利用视觉SLAM技术实现环境建模和定位,同时结合人工标记码进行目标识别和导航。实验结果表明,该方法能够实现准确的定位和导航,具有较高的可靠性和鲁棒性。关键词:视觉SLAM、人工标记码、定位、导航、环境建模1.引言定位与导航在无人驾驶和机器人技术中具有重要的应用价值。传统的定

一种基于Kinect的视觉SLAM方法.pdf
本发明涉及一种基于Kinect的视觉SLAM方法,涉及计算机视觉技术领域。采用本发明基于Kinect的视觉SLAM方法,在视觉里程计环节通过结合主成分分析法将传统的SIFT算法降维得到PCA‑SIFT算法,并将匹配时的所用的欧式距离改为街区距离和棋盘距离的线性组合,提高了整体视觉SLAM的实时性。在回环检测中,首先提取关键帧的轮廓进行轮廓匹配缩减所需要进行相似性检测的关键帧数量,然后利用词袋模型进行二次回环精确回环检测,提高了回环检测的鲁棒性。

智能小车视觉导航方法.pdf
本发明公开了一种智能小车视觉导航方法,基于最小生成树结构的立体匹配算法解决图像纹理弱,匹配精度不高以及匹配速度慢的问题,提供路径规划所需要的环境信息,从而实现路径三维精确重建,为后续的路径规划与避障提供必要的先验知识。光线暗弱情况下前景图像属于弱纹理区域,传统匹配算法对弱纹理区域的效果差、误匹配率高,而CENSUS变换算法对光照、干扰具有较好的鲁棒性,且保留了窗口中像素的位置特征,将CENSUS变化与树结构相结合,解决传统立体匹配算法对弱纹理区域匹配误差率高的问题。