
基于SLAM技术的车库自主导航装置及导航方法.pdf

绮兰****文章


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于SLAM技术的车库自主导航装置及导航方法.pdf
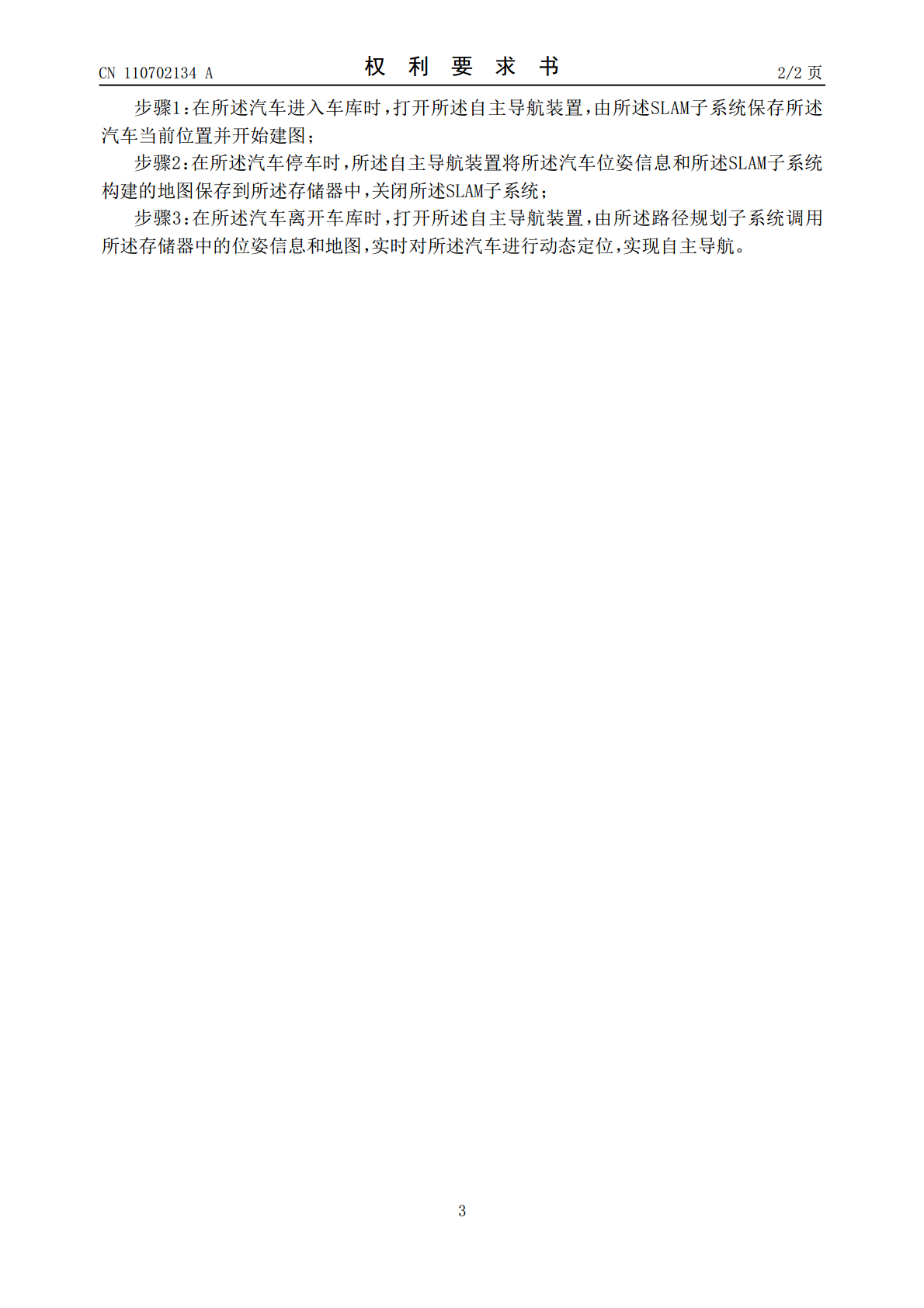
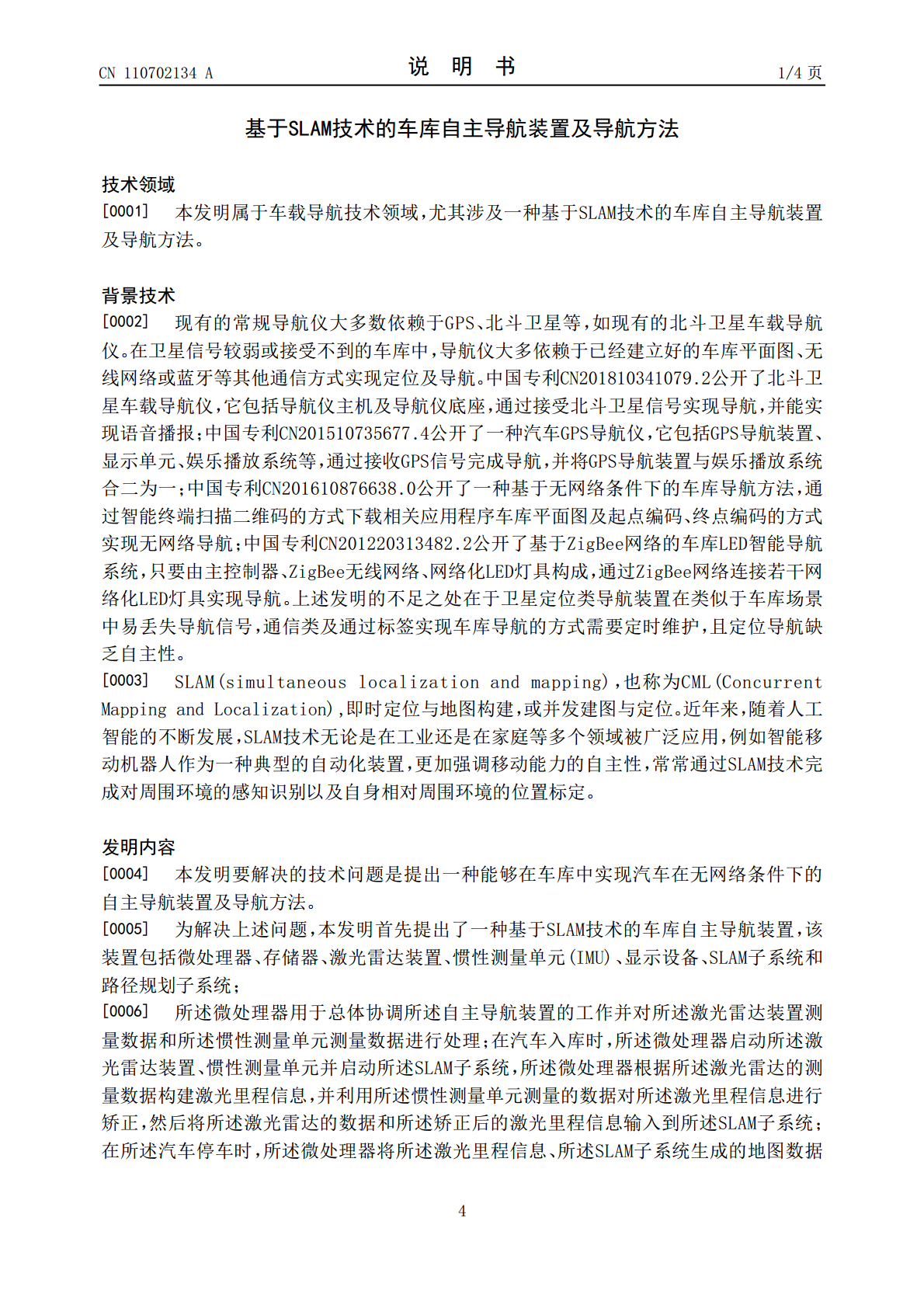
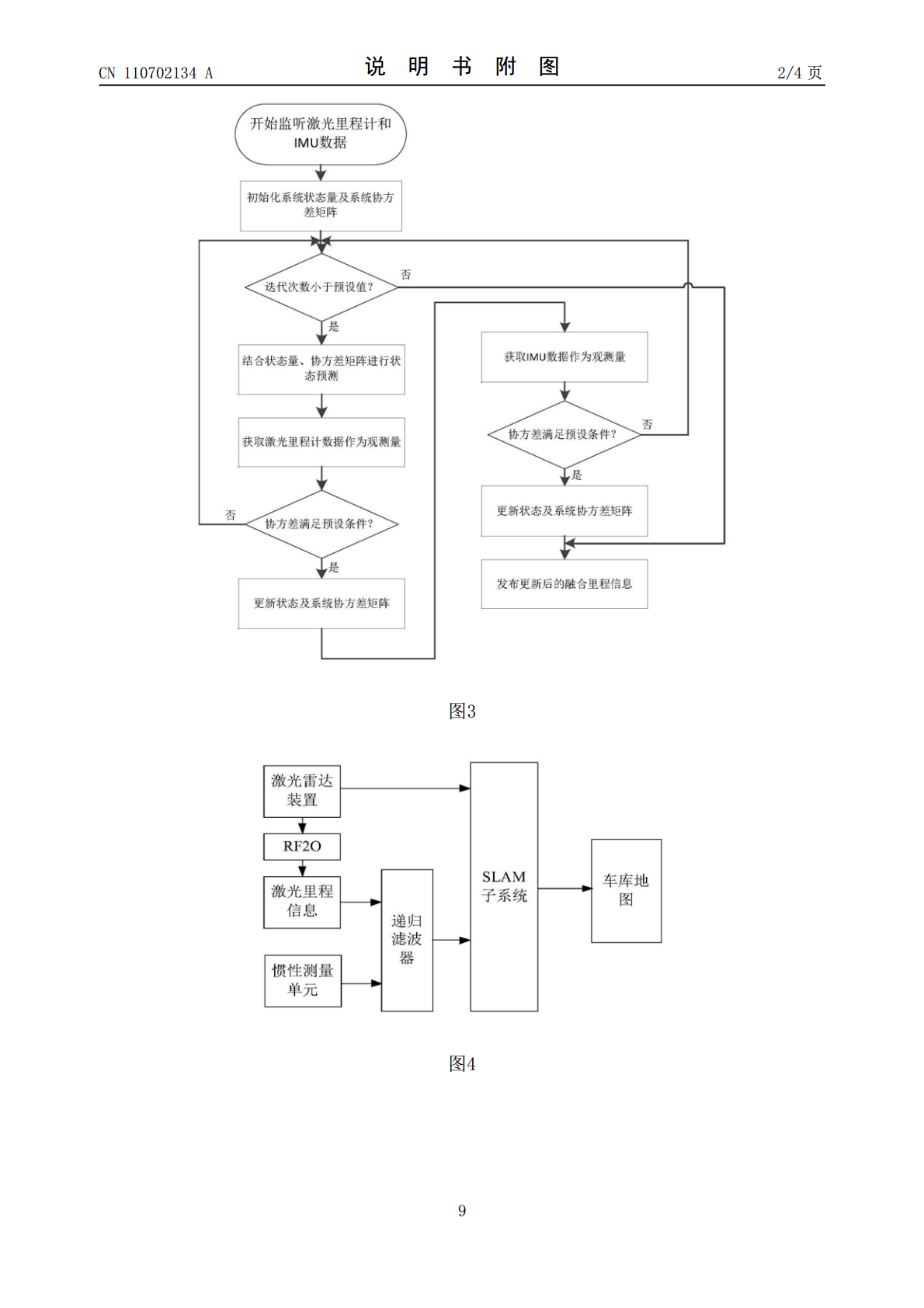
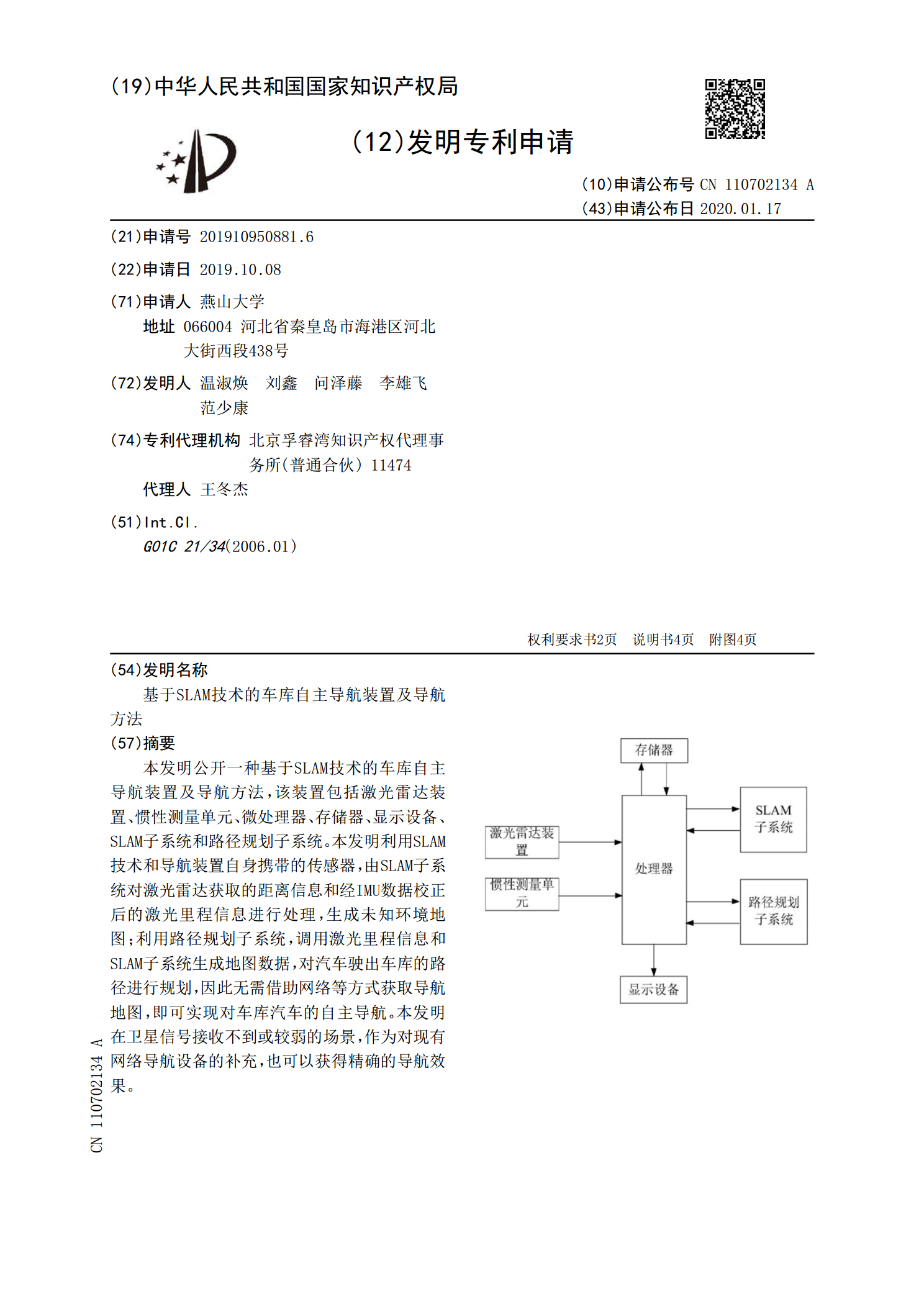
本发明公开一种基于SLAM技术的车库自主导航装置及导航方法,该装置包括激光雷达装置、惯性测量单元、微处理器、存储器、显示设备、SLAM子系统和路径规划子系统。本发明利用SLAM技术和导航装置自身携带的传感器,由SLAM子系统对激光雷达获取的距离信息和经IMU数据校正后的激光里程信息进行处理,生成未知环境地图;利用路径规划子系统,调用激光里程信息和SLAM子系统生成地图数据,对汽车驶出车库的路径进行规划,因此无需借助网络等方式获取导航地图,即可实现对车库汽车的自主导航。本发明在卫星信号接收不到或较弱的场景,
一种基于视觉SLAM方法的自主导航小车.pdf
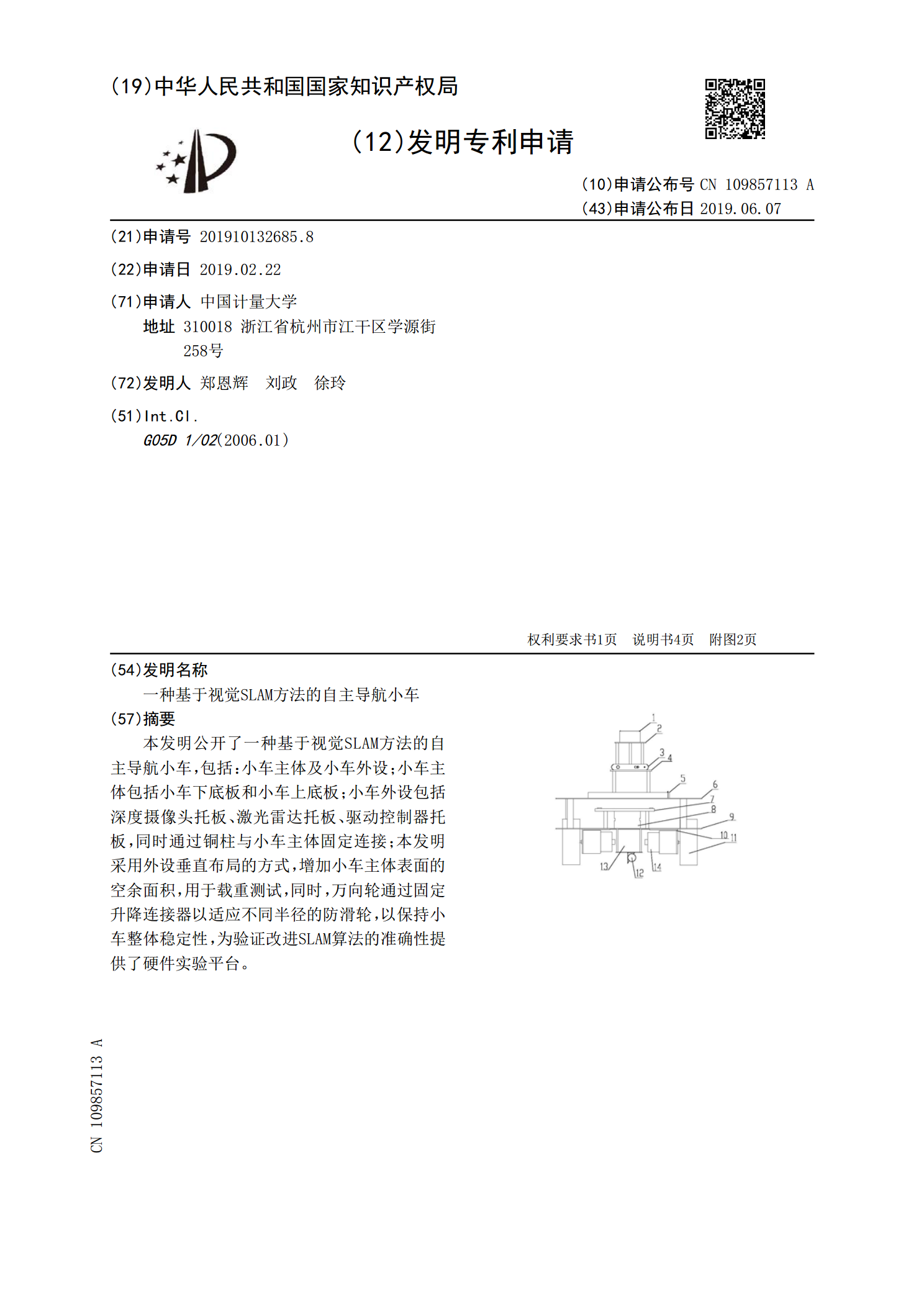
本发明公开了一种基于视觉SLAM方法的自主导航小车,包括:小车主体及小车外设;小车主体包括小车下底板和小车上底板;小车外设包括深度摄像头托板、激光雷达托板、驱动控制器托板,同时通过铜柱与小车主体固定连接;本发明采用外设垂直布局的方式,增加小车主体表面的空余面积,用于载重测试,同时,万向轮通过固定升降连接器以适应不同半径的防滑轮,以保持小车整体稳定性,为验证改进SLAM算法的准确性提供了硬件实验平台。

基于V-SLAM算法的室内自主导航方法、装置、设备和介质.pdf
本发明公开了一种基于V‑SLAM算法的室内自主导航方法,步骤如下:视觉信息采集;基于视觉里程计算法估计移动机器人位姿信息,得出运动主体的运行轨迹;将机器人的位姿用节点表示,通过非线性最小二乘方法优化建图过程中累积的误差,并迭代线性化求解;基于栅格建图算法,构建移动机器人导航地图,并基于点线特征匹配方法,通过拍照所得二维图像与V‑SLAM所构建三维地图进行匹配,计算定位结果,利用A*算法进行路径规划,实现自主导航。本发明基于V‑SLAM算法提出了一种自主导航方法,实时实现移动机器人的地图构建及同步定位,并有

基于SLAM下温室自主导航系统的设计与试验.docx
基于SLAM下温室自主导航系统的设计与试验一、内容综述随着科技的不断发展,温室自主导航系统的研究和应用越来越受到人们的关注。基于SLAM(SimultaneousLocalizationandMapping,同时定位与地图构建)技术的温室自主导航系统具有较高的精度和稳定性,能够为温室环境提供有效的自动化管理。本文将对基于SLAM下温室自主导航系统的设计与试验进行详细阐述,包括系统的整体架构、关键技术、实验设计以及实验结果分析等方面。本文介绍了温室自主导航系统的基本概念和背景知识,包括温室环境的特点、现有温

基于惯性导航角度补偿的室内激光SLAM方法.docx
基于惯性导航角度补偿的室内激光SLAM方法基于惯性导航角度补偿的室内激光SLAM方法摘要:随着智能机器人技术的快速发展,室内激光SLAM(SimultaneousLocalizationandMapping,即同时定位与地图构建)在自主导航和环境感知中起着重要的作用。然而,在室内环境中,惯性导航常常会面临困境,例如由于地面不平或运动状态不稳定导致角度误差的累积问题。本文提出了一种基于惯性导航角度补偿的室内激光SLAM方法,以解决上述问题。该方法结合了惯性导航和激光扫描数据,通过使用地面特征和滤波器算法实现