
无啮合传动钢丝缠绕机器人.pdf

霞英****娘子

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
无啮合传动钢丝缠绕机器人.pdf
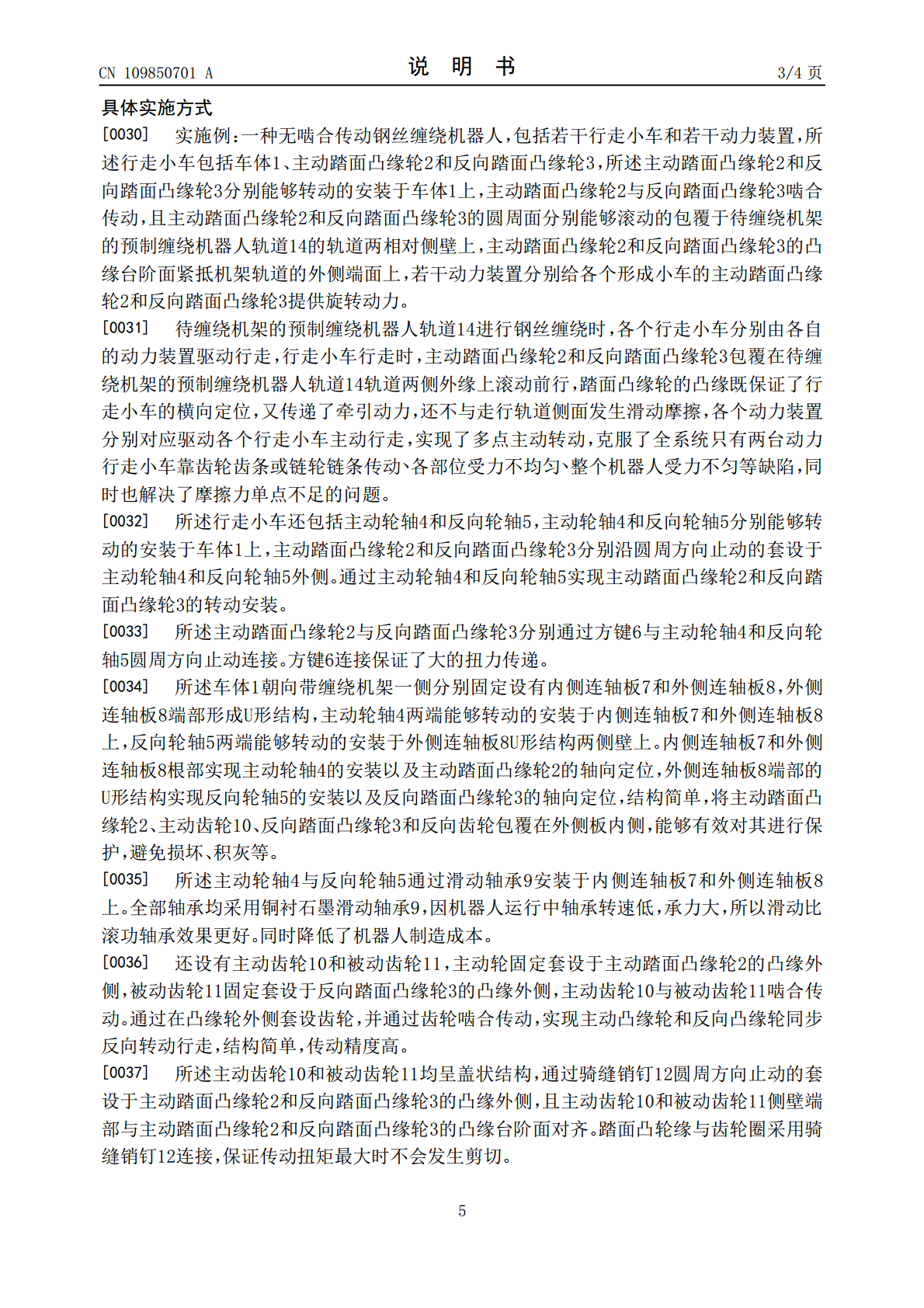
本发明公开了一种无啮合传动钢丝缠绕机器人,包括若干行走小车和若干动力装置,所述行走小车包括车体、主动踏面凸缘轮和反向踏面凸缘轮,所述主动踏面凸缘轮和反向踏面凸缘轮分别能够转动的安装于车体上,主动踏面凸缘轮与反向踏面凸缘轮啮合传动,且主动踏面凸缘轮和反向踏面凸缘轮的圆周面分别能够滚动的包覆于待缠绕机架的预制缠绕机器人轨道的轨道两相对侧壁上,主动踏面凸缘轮和反向踏面凸缘轮的凸缘台阶面紧抵机架轨道的外侧端面上,若干动力装置分别给各个形成小车的主动踏面凸缘轮和反向踏面凸缘轮提供旋转动力,本发明从根本上解决了预紧缠
桁架式分动力传动大型钢丝缠绕转盘.pdf
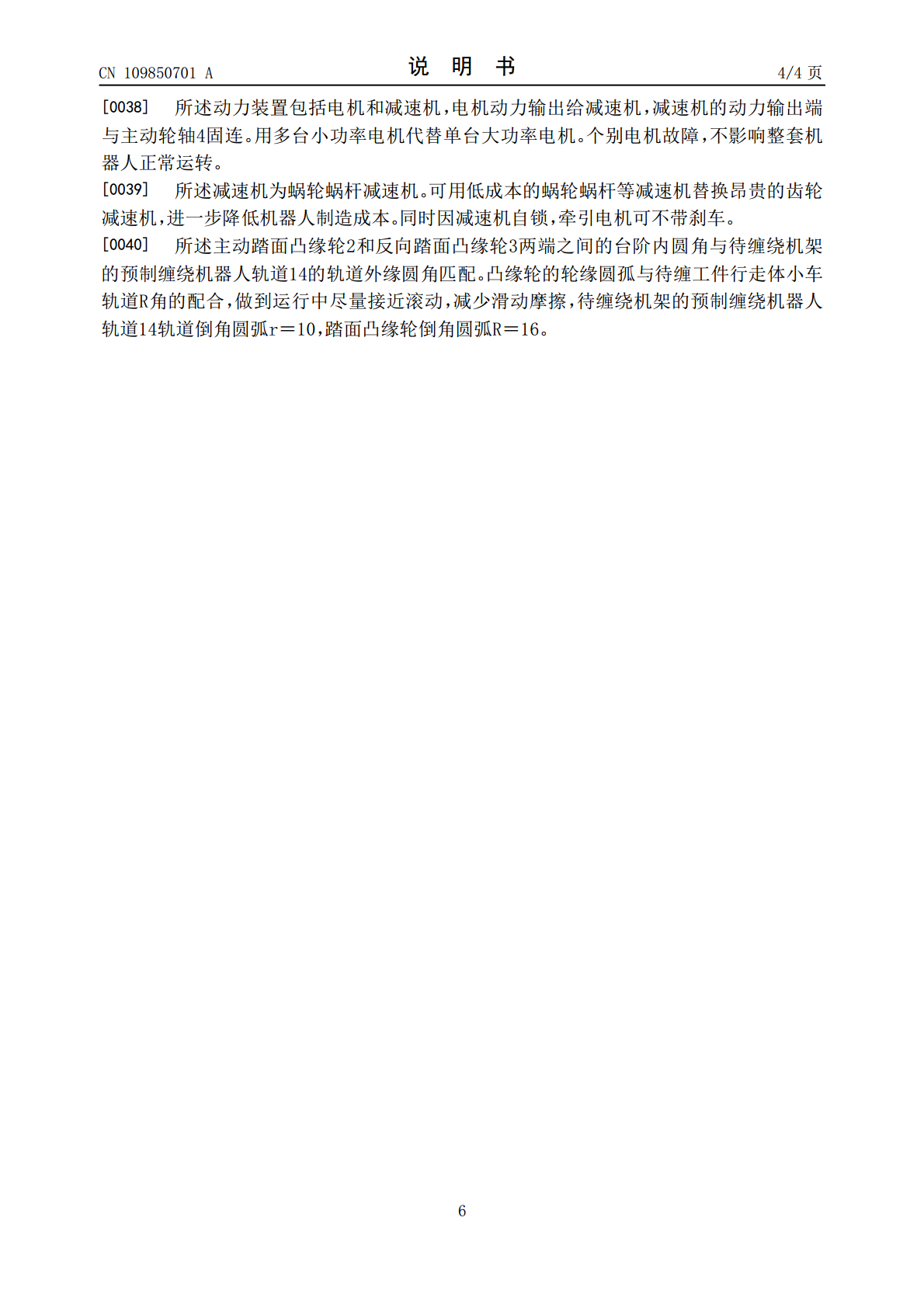
本发明公开了一种桁架式分动力传动大型钢丝缠绕转盘,包括中心回转轴、导电滑环、转盘、分动力承重小车和电机,所述导电滑环轴向止动且圆周方向能够转动套设于中心回转轴外侧,转盘固定套设于导电滑环外侧,转盘上侧表面形成承载表面,至少三个分动力承重小车固定安装于转盘下侧面,分动力承重小车上设有滚轮和电机,滚轮轴线沿转盘径向延伸,电机驱动滚轮旋转,导电滑环通过电线给各个电机供电,本发明便于制造、安装和拆卸,占用空间小,便于运输和储存,制造和运输成本低,能耗少。

钢丝缠绕机缠绕盘结构.pdf
本发明公开了一种钢丝缠绕机缠绕盘结构,主要由缠绕盘和均匀固定设置在缠绕盘圆周边上的多组储丝轮组件组成。所述储丝轮组件主要包括储丝轮、连接轴、夹板、储丝轮轴及自锁销。所述连接轴的一端与缠绕盘螺栓固定连接,在连接轴的另一端成对等距离设置夹板,在其夹板高度的2/3处的轴中心位置设置有U形凹槽,在夹板上端部的径向两端分别设置有自锁销卡孔和自锁销键槽。在储丝轮轴的两端头设置有与U形凹槽相适配的凸台,在储丝轮轴的两端外壁设置有轴向键槽,储丝轮旋转套装在储丝轮轴上,储丝轮轴与夹板凹凸抽插式活动连接。本发明可提高劳动生产

钢丝绳整绳无动力缠绕夹紧装置.pdf
本发明涉及一种钢丝绳整绳无动力缠绕夹紧装置,由钢丝绳夹紧装置、钢丝绳缠绕滚筒组件、连接试验机的销轴和钢丝绳组成,其中核心部分为钢丝绳夹紧装置。钢丝绳的两端经过钢丝绳缠绕滚筒组件缠绕后,分别将钢丝绳两头置于钢丝绳压紧移动滑块与凸轮之间,钢丝绳在拉伸过程中将受到钢丝绳压紧移动滑块与凸轮的夹紧力作用,旋转丝杆手轮便可以逐渐减小钢丝绳压紧移动滑块与凸轮之间的间隙,将钢丝绳锁紧并咬住,从而确保钢丝绳拉伸试验能够顺利完成。本发明亦可应用于其他需要固定安装钢丝绳的场合和设备上。

用于机器人的钢丝传动变速比转动关节.pdf
用于机器人的钢丝传动变速比转动关节,它涉及一种下肢助力外骨骼机器人。本发明包括电机轴系、传动机构、大腿连接件和小腿连接件;电机轴系包括减速电机、轴承、轴承挡板和电机轴承座,减速电机固定在电机轴承座上,轴承挡板将轴承紧固在电机轴承座内;传动机构包括主动轴、从动轴、钢丝绳、凸轮、关节轴、关节轴轴承、钢丝绳固定块、预紧机构、主动轴轴承和从动轴轴承,传动机构上的主动轴与电机轴系上的减速电机的输出轴连接,传动机构上的关节轴的两端通过轴承与大腿连接件连接,小腿连接件的上端与关节轴固接。本发明用于下肢助力外骨骼机器人上