
一种水轮机调节系统的快速终端滑模控制器及设计方法.pdf

一吃****成益


1/10

2/10
3/10
4/10

5/10
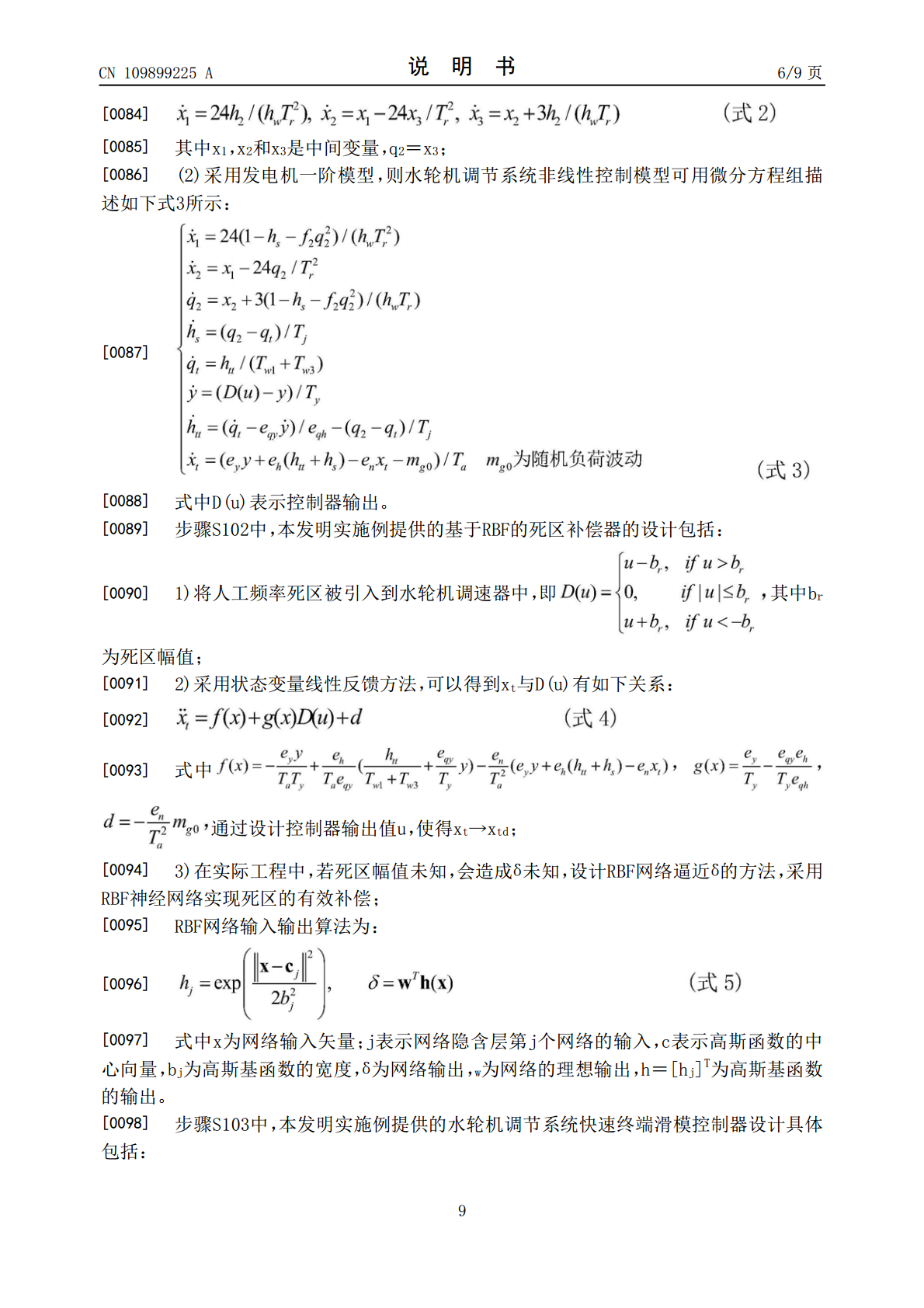
6/10

7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水轮机调节系统的快速终端滑模控制器及设计方法.pdf
本发明属于水轮机调节控制技术领域,公开了一种水轮机调节系统的快速终端滑模控制器及设计方法,建立典型含引水管道和尾水管道的水轮机调节系统非线性控制模型;设计基于RBF的死区补偿器;设计水轮机调节系统快速终端滑模控制器。本发明提供的快速终端滑动模态控制技术被引入到水轮机调节系统非线性模型中,鲁棒性更强且不依赖于被控系统的模型,特别适合于水轮机调节系统这类具有不确定性、时变性和高度非线性的对象;可显著提高滑模面的控制性能,使系统跟踪误差可在有限时间内快速收敛到零;对水轮机调节系统的控制效果改进非常显著。
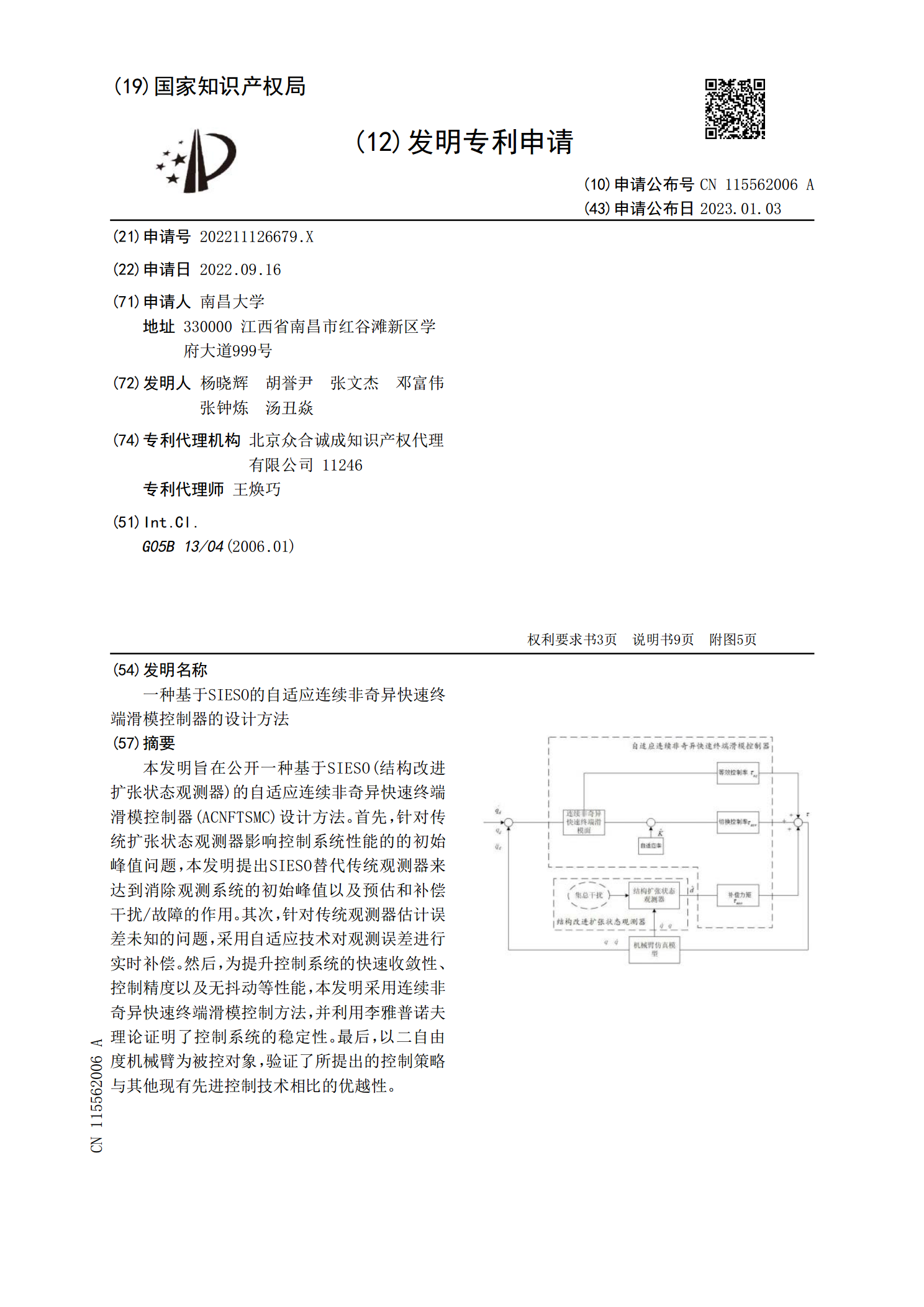
一种基于SIESO的自适应连续非奇异快速终端滑模控制器的设计方法.pdf
本发明旨在公开一种基于SIESO(结构改进扩张状态观测器)的自适应连续非奇异快速终端滑模控制器(ACNFTSMC)设计方法。首先,针对传统扩张状态观测器影响控制系统性能的的初始峰值问题,本发明提出SIESO替代传统观测器来达到消除观测系统的初始峰值以及预估和补偿干扰/故障的作用。其次,针对传统观测器估计误差未知的问题,采用自适应技术对观测误差进行实时补偿。然后,为提升控制系统的快速收敛性、控制精度以及无抖动等性能,本发明采用连续非奇异快速终端滑模控制方法,并利用李雅普诺夫理论证明了控制系统的稳定性。最后,

一种连续非奇异快速终端滑模控制方法.docx
一种连续非奇异快速终端滑模控制方法导言随着科学技术的发展,在控制领域,滑模控制已经成为一种重要的非线性控制方法之一。它可以通过快速和准确的控制系统构建来应对各种复杂的控制问题,同时控制效果也比传统控制方法更优秀。近年来,快速终端滑模控制被广泛研究和应用,能够应对系统的动态变化,提高系统鲁棒性和响应速度。本文将介绍一种连续非奇异快速终端滑模控制方法,通过详细的理论阐述和实验验证,证明该方法在实际应用中具有很好的效果。快速终端滑模控制方法快速终端滑模控制是一种基于非线性滑模控制的改进方法,它充分利用快速终端滑
一种基于快速输出采样的滑模输出反馈控制器设计方法.pdf
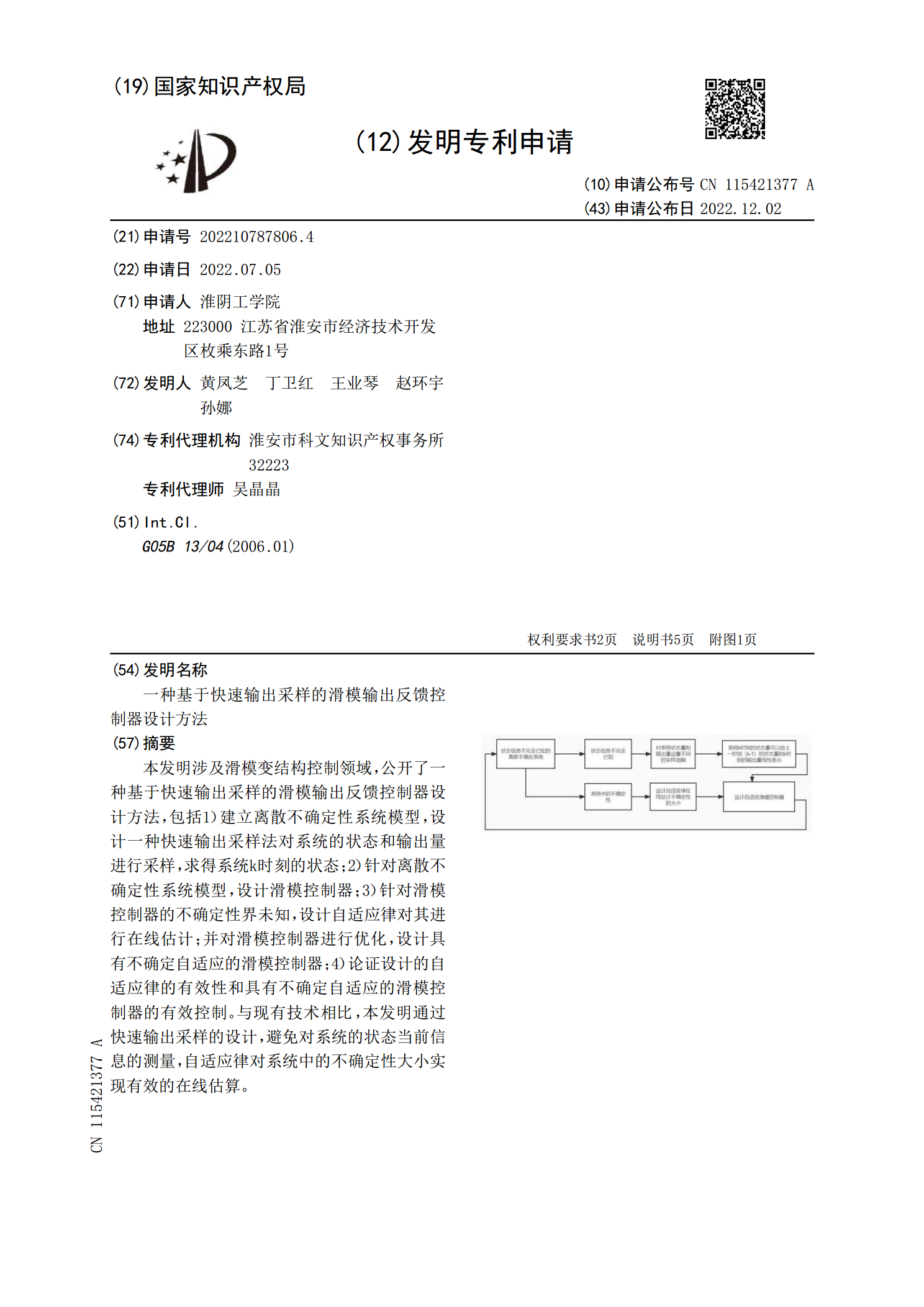
本发明涉及滑模变结构控制领域,公开了一种基于快速输出采样的滑模输出反馈控制器设计方法,包括1)建立离散不确定性系统模型,设计一种快速输出采样法对系统的状态和输出量进行采样,求得系统k时刻的状态;2)针对离散不确定性系统模型,设计滑模控制器;3)针对滑模控制器的不确定性界未知,设计自适应律对其进行在线估计;并对滑模控制器进行优化,设计具有不确定自适应的滑模控制器;4)论证设计的自适应律的有效性和具有不确定自适应的滑模控制器的有效控制。与现有技术相比,本发明通过快速输出采样的设计,避免对系统的状态当前信息的测

一种快速终端滑模阻抗控制算法.pdf
本发明提供了一种快速终端滑模阻抗控制算法。主要包括以下步骤:步骤1,将力反馈设备简化为双连杆模型;步骤2,求解简化模型的运动学;步骤3,求解简化模型的动力学;步骤4,建立阻抗模型;步骤5,设计快速终端滑模控制器。本发明的优点在于:一、引入了终端吸引子,保证了系统状态能够在有限时间内收敛到平衡点;二,保留了线性滑模控制部分,因此具有在平衡点附近快速收敛的特点。快速终端滑模阻抗控制使系统状态能够快速、精准的收敛到平衡点。与滑模阻抗控制算法相比,快速终端滑模阻抗控制具有更小的位置跟踪误差。